A pesar de ser tecnológicamente menos arriesgada, Mars Polar Lander era mucho más interesante científicamente que su antecesora, Mars Pathfinder. Llevaba más experimentos, y sus cometidos, más importantes. Posaría sus patas en las cercanías del polo sur para, sobre todo, buscar hielo bajo la superficie mediante un brazo robot e instrumentos especiales. Como ya hemos contado hasta rallar el aburrimiento, nunca pudo cumplir sus tareas porque se perdió durante el descenso. Este fracaso propició que la que se estaba fabricando para ser enviada el año 2001 (idéntica mecánicamente a Mars Polar Lander y diseñada para estudiar la geología y el medio ambiente marciano en previsión a una posible expedición tripulada) fuera cancelada. Su estructura, casi terminada, fue almacenada por su constructora en una sala limpia con condiciones estrictamente controladas, por si alguien decidía usarla para alguna nueva misión.
Con la elección, en el año 2000, de las misiones Mars Exploration Rovers y Mars Reconnaissance Orbiter para sus lanzamientos en el 2003 y el 2005 respectivamente, la NASA creó en el 2001 un nuevo programa para la exploración del planeta. Bajo el nombre de Mars Scout Program, se encargaría de proponer sondas de moderado presupuesto, portadoras de tecnologías innovadoras para el estudio del planeta rojo mediante orbitadores o aterrizadores. La primera entraba en esta última categoría.
Con el nombre de
Phoenix Mars Lander, o sencillamente
Phoenix, fue bautizada una sonda que aterrizaría en la zona ártica marciana para estudiar el suelo y la atmósfera de la región en busca de pistas sobre la evolución que transformó esa zona marciana en la más llana extensión del sistema solar. Es, hasta la fecha, el proyecto más internacional propuesto, o uno de ellos, de la historia, y el primer proyecto al planeta rojo dirigido directamente por una universidad, en esta ocasión la Universidad de Arizona, a través de su Laboratorio Lunar y Planetario.
Conociendo que la estructura de la cancelada Mars Surveyor 2001 Lander estaba disponible, decidieron hacer uso de ella. Junto con esto, decidieron utilizar uno de los experimentos de ésta, eso sí, reconfigurado para su nueva labor. Para su finalización, aceptaron varias recomendaciones propuestas por el informe de la investigación de la pérdida de Mars Polar Lander.
Seleccionada en el 2005, se trataba de una misión en la que intervendrían las más importantes instituciones centradas en la exploración espacial de todo el mundo. En él estaban implicados el Jet Propulsion Laboratory, Centro de Investigación Ames y Centro Espacial Johnson por parte de la NASA, la
Agencia Espacial Canadiense, empresas como la
Malin Space Science Systems (fabricante de casi todas las últimas cámaras que han llegado a Marte) o instituciones como la Universidad de Arizona (madre del proyecto), el instituto SETI, el
Instituto Max Planck para la Investigación del Sistema Solar de Alemania, la Universidad de Colorado, Universidad Tufts, Universidad de Michigan, Universidad de Texas en Dallas, Universidad de Washington, la Washington University de St. Louis, la York University de Canadá, la Universidad de Copenaghe, la
Universidad de Neuchâtel de Suiza, así como científicos del Imperial College de Londres y de la Universidad de Bristol. Casi nada. Sus objetivos, además de indagar sobre el agua en la región, estudiaría el suelo para buscar pruebas sobre habitabilidad pasada o actual.
A la vez que la propuesta para la misión Phoenix era redactada, el instrumento GRS a bordo de Mars Odyssey detectó emisiones de hidrógeno en diversas zonas del planeta rojo. Este hecho motivó a la NASA a proporcionar la financiación necesaria para que esta sonda de superficie pudiera hacerse realidad.
La sonda
Phoenix era un aterrizador estático que utilizó gran parte del hardware construido para la cancelada
Mars Surveyor 2001 Lander. Medía 5.52 metros de largo con sus paneles solares desplegados, 2.2 de alto con su mástil meteorológico extendido, y descansaba sobre tres patas unidas a la estructura mediante amortiguadores. La plataforma de instrumental, de aluminio, medía 1.5 metros de diámetro. Dos paneles solares decagonales Ultraflex de 4.2 metros cuadrados alimentaban dos baterías de ión litio. El ordenador se basaba en los montados en casi todas las sondas anteriores como los MER o
Mars Odyssey, controlado por un microprocesador RAD6000, que proporcionaba el control y el manejo de los datos, con una memoria RAM dinámica de 74 MB, ampliable con una memoria flash. El sistema de comunicaciones era un transmisor-receptor UHF unido a una antena monopolo helicoidal montada en uno de los laterales de la plataforma de instrumentos de la sonda. Permitía enlazar rápidamente con el centro de control mediante la intermediación de los relés UHF montados en
Mars Odyssey, en
Mars Express, y en
Mars Reconnaissance Orbiter a distintos ratios de transmisión. Un conjunto de 12 motores alrededor de la zona baja de la estructura permitía el descenso autopropulsado tras su liberación de la aerovaina, y disponía de otros 8 propulsores colocados de manera transversal para controlar la orientación no solo durante el descenso, sino que también servirían, conectados a unas pequeñas aberturas en la aerovaina, para completar las maniobras espaciales. Un radar colocado en la zona baja permitía saber a
Phoenix la altitud exacta a la que se encontraba del suelo. Para evitar la avería por el frío, usaba calentadores eléctricos, termostatos, mantas multicapas y recubrimientos térmicos. A su vez, la plataforma de instrumental hacía también las veces de capa de aislamiento. En total, incorporaba siete instrumentos. La herramienta más importante era el RA,
es decir, el Brazo Robot. Fabricado en aluminio y titanio, medía 2.35 metros de largo, y disponía de dos secciones, terminado en una pala con dientes y láminas para rascar el material más duro. Era capaz de profundizar hasta 50 centímetros en el suelo marciano, para luego llevar las muestras a otros instrumentos para poder analizarlas. Durante el viaje a Marte y el proceso de amartizaje quedaría dentro de una envoltura de protección biológica, o biobarrera. Originalmente diseñado para operar en
Mars Surveyor 2001 Lander, tuvo que ser reforzado para su nueva labor. Adosado a él se encontraba el RAC, Cámara del Brazo Robot. Se trataba de una versión modernizada del mismo aparato montado en la perdida
Mars Polar Lander. Si bien mantenía sus capacidades de observar cercanamente el suelo y las muestras, añadía la capacidad de apuntar al
infinito, gracias a un motor que accionaba un mecanismo de enfoque (la primera vez que un sistema de estas características era montado en una sonda espacial marciana), y sufrió una importante modificación en el sistema de luces. Las bombillas clásicas fueron sustituidas por dos sistemas de luces de diodos, equipando 36 luces azules y 18 verdes y rojas en el superior, mientras que en el inferior llevaba 16 azules y 8 verdes y rojas, para así contemplar el suelo y las muestras bajo esas luces y ver qué materiales se iluminaban bajo las longitudes de onda de estas luces. La resolución aproximada era de 23 micrones. El sistema principal de visión de
Phoenix era el SSI, Cámara Estéreo de Superficie. Se trataba de una versión mejorada de la que llevaba
Mars Polar Lander, que a su vez era una versión mejorada de la IMP de
Mars Pathfinder. Eran dos cámaras CCD de 1 megapixel acopladas cada una a una rueda de filtros de 12 posiciones capaces de realizar
tomas de la superficie en diversas longitudes de onda, para componer imágenes a color real y falso color, además de poder observar el infrarrojo para observaciones atmosféricas y geológicas, y disponía de un filtro especial para apuntar al Sol para observar la distorsión atmosférica provocada por el polvo o por las nubes. Situado al final de un soporte de un metro de altura, estaba enganchada a una base rotatoria 360º y variable en inclinación. El uso combinado de esas imágenes permitía crear panorámicas estereoscópicas. El primero de los analizadores era el TEGA, Analizador de Gas Termal y Desarrollado. Combinaba un horno y un espectrómetro de masa. Era una versión modificada del montado en
Mars Polar Lander, con la diferencia mecánica de que los 8 hornillos (de uso único) estaban situados cuatro a cada lado, y no en disposición 5-3, como en la perdida en 1999. Cada horno poseía una rejilla para permitir así la entrada a las partículas más pequeñas, dejando fuera lo más grande. Una
vez la muestra estaba en el contenedor, el hornillo se ponía en marcha, evaporando la muestra y llevando el resultado al espectrómetro, que era capaz de detectar concentraciones de material con una sensibilidad de 10 partes por millón, ya fuera de agua, dióxido de carbono o incluso materiales orgánicos. El segundo analizador era el MECA, también llamado Analizador Microscópico de Electroquímica y Conductividad. Originario de
Mars Surveyor 2001 Lander, y bajo el nombre de Experimento de Evaluación de Compatibilidad Ambiental de Marte, estaba diseñado para detectar cualquier elemento que pudiera ser peligroso para los astronautas que en un futuro pudieran alcanzar el planeta. Reconfigurado para su nueva labor, era un instrumento compuesto por una serie de elementos que correspondían un laboratorio de química húmeda, un microscopio óptico, otro microscópico, éste de fuerza atómica, una rueda de muestras, cuatro contenedores internos, y una Sonda de Conductividad Termal Eléctrica (TECP), situada en el brazo robot. El laboratorio de química húmeda recibía las muestras del suelo al ser introducidas en cualquiera de los cuatro depósitos. La muestra era humedecida por agua transportada en
Phoenix, para su posterior análisis mediante sensores electroquímicos, siendo capaz de detectar iones de magnesio, sodio, calcio o sulfatos. Este aparato proporcionaba datos sobre la historia química de Marte, así como evaluaba la compatibilidad biológica del suelo. La rueda de muestras, situada en una abertura en el final de uno de los lados del MECA, era cargada con muestras del talco marciano, para transportarlas a los dos microscopios. El microscopio óptico, fabricado por la Universidad de Arizona, era capaz de observar las muestras del suelo marciano que le llegaran con un nivel de resolución de 16 micrometros por pixel, o 256 pixels por milímetro. La muestra era iluminada por nueve LED’s rojos, verdes y azules, o tres LED’s que emitían luz ultravioleta. El microscopio poseía idéntico chip CCD que el que montaba el RAC. El microscopio de fuerza atómica, proporcionado por la Universidad de Neuchâtel, operaba escaneando, con una punta de cristal de silicio (de las ocho que llevaba), la muestra, para luego medir la repulsión a través de esa punta. El ordenador así procesaba los datos proporcionando una imagen de la muestra con una resolución de 0.1 micrómetros, como si de un perfil topográfico se tratara. Y por último, la TECP,

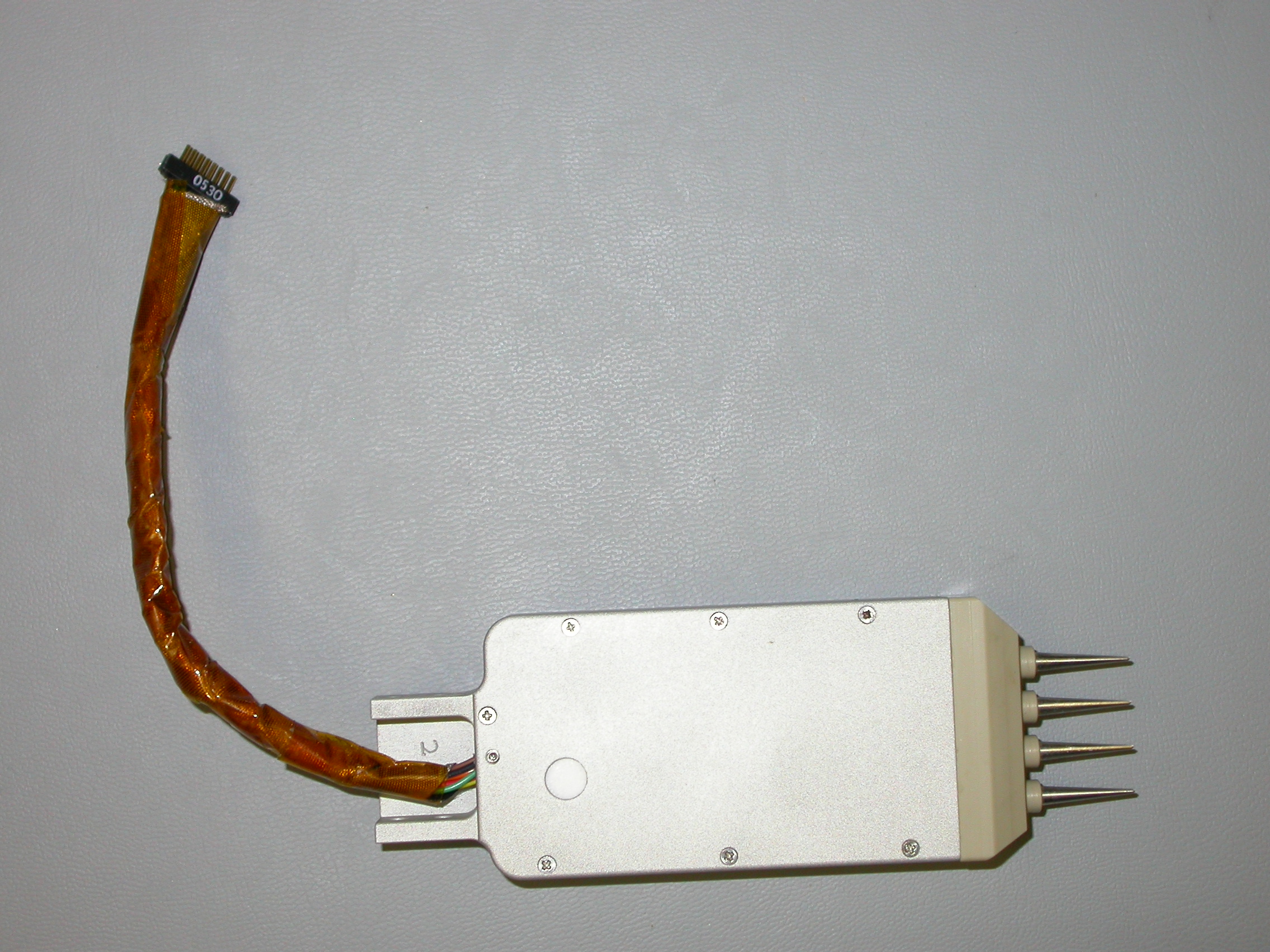
situada en un soporte instalado en el RA, era una especie de tenedor con cuatro puntas que se insertaba en el suelo o que se exponía al aire para tomar medidas de la temperatura del suelo, humedad relativa del suelo y del aire, conductividad del calor y de la electricidad, temperatura del aire e intensidad del viento. El MECA era todo un paquete medioambiental. Otro instrumento era el MET, estación Meteorológica. Derivaba directamente de la montada en
Mars Polar Lander, y equipaba indicadores de presión, de velocidad y dirección del viento, y sensores de temperatura a lo largo de un mástil vertical de 1 metro de altura. Los sensores de temperatura eran tres, colocados a 25 cm, 50 cm, y al final del mástil. El sensor de presión estaba colocado en la parte inferior de la estructura de la sonda. Estos sensores tomaban lecturas cada dos segundos para un registro lo más fiable y en tiempo real posible. El indicador del viento se situaba arriba del todo en el mástil, para medir velocidad y dirección del viento, y quedaba a la vista para que tanto el SSI como el RAC tomaran imágenes continuas de su movimiento. Las mediciones atmosféricas eran complementadas por el LIDAR, o instrumento de Detección y Medición de la Luz, que era un laser de emisión vertical que sondeaba la atmósfera como un radar para investigar la distribución vertical de polvo, hielo, niebla o nubes en la región. Poseía un alcance de unos 5 km. de altura. Y por último, la MARDI, Cámara de

Descenso Marciana. Respecto a la equipada por
Mars Polar Lander, el funcionamiento era idéntico, salvo que adquiriría imágenes a todo color del descenso gracias al filtro Bayer (idéntico al usado en las cámaras digitales actuales) instalado en su objetivo. Estaba destinada a
Mars Surveyor 2001 Lander, y se encontraba terminada en el momento en que este aterrizador fue cancelado, y fue almacenada por si acaso. Era la cámara más ligera enviada al planeta rojo (480 gramos), y hubiera grabado los tres últimos minutos del descenso en vídeo, e incluso en audio, gracias a un micrófono acoplado en la caja de la electrónica del aparato. Se aseguraba su funcionamiento durante 90 Soles, o días marcianos, unos 92 días terrestres. El peso total de
Phoenix era de 410 kg.
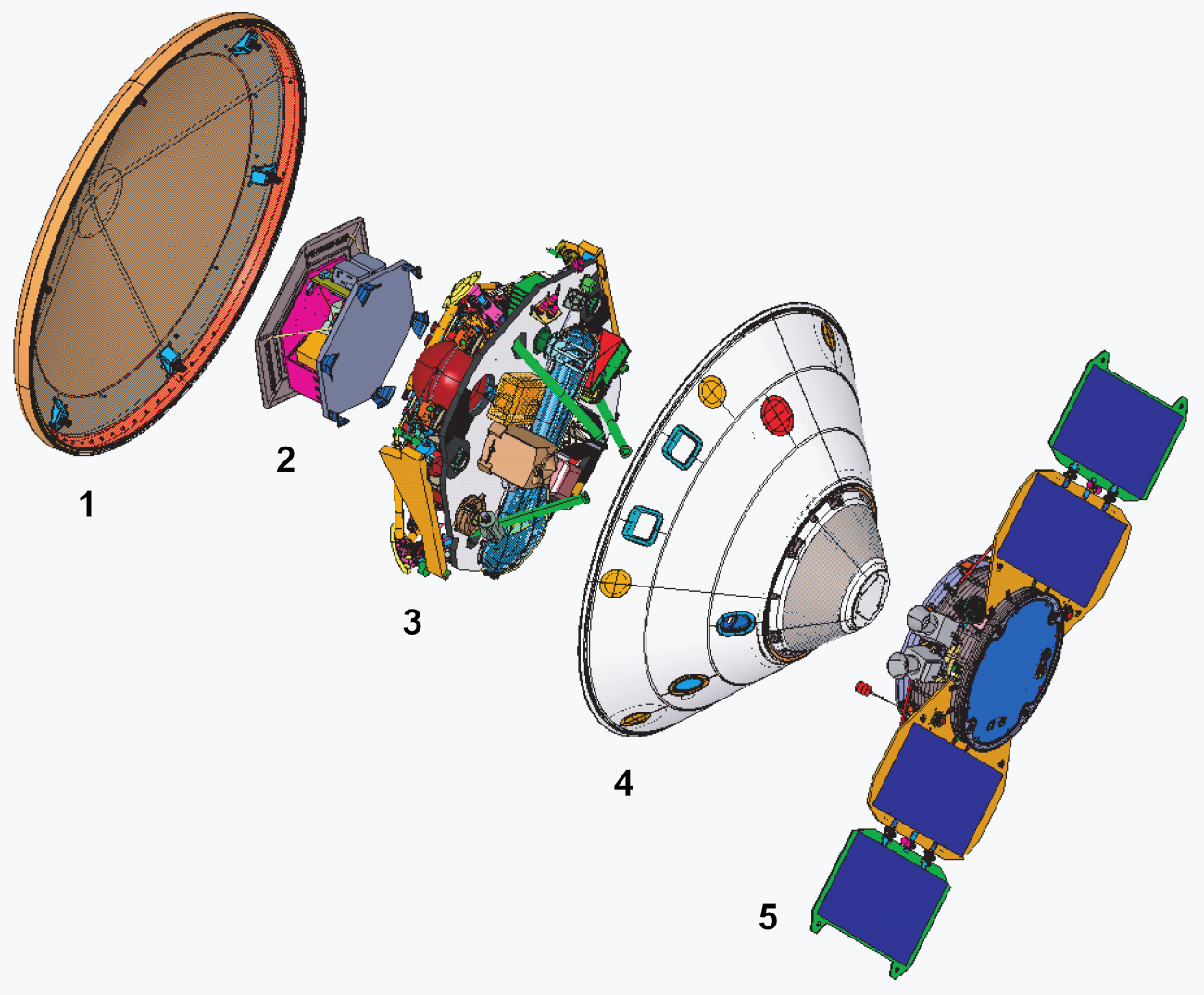
El diseño de la fase de crucero era idéntico al usado por
Mars Polar Lander. Una aerovaina y un escudo de reentrada de 2’4 metros de diámetro ofrecían la protección durante la reentrada balística. La fase de crucero estaba formada por el sistema de orientación (dos sensores solares y dos escáneres estelares unidos a la unidad de medición inercial montada en
Phoenix), tres antenas en banda-X (una de media y dos de baja ganancia) unidas a un amplificador de potencia colocados en la aerovaina, y dos placas solares plegables, que se extendían tras el lanzamiento, y estaba estabilizada en sus tres ejes durante la fase de crucero. El conjunto en el momento del lanzamiento desplazaba una masa de unos 664 kg.
El cohete seleccionado para su lanzamiento fue el Delta 2-7925, con una larga lista de éxitos en sus lanzamientos de sondas marcianas, tales como Mars Global Surveyor, Mars Pathfinder, Mars Odyssey y Spirit. La fecha se fijó para el 3 de agosto del 2007.
Una vez trasladada a las instalaciones de Cabo Cañaveral para su preparación para su lanzamiento, vieron un problema electrónico que afectaría a la transmisión de datos durante el amartizaje, y que también ponía en peligro el uso de la MARDI. Cuando el sistema fue desmontado, vieron que una placa de procesadores estaba averiada, lo que provocaría que solo una de las tareas de las que controlaba (la transmisión de datos de ingeniería o la grabación de imágenes de la MARDI) se realizara. Tras un corto debate, eligieron no usar la cámara de descenso (aunque ésta se mantendría adosada a Phoenix) para así salvar estos importantísimos datos.
Con un día de retraso a causa de un problema en el rellenado de combustible del lanzador, el
Delta 2 con
Phoenix en su cofia fue elevado con éxito en uno de los pocos lanzamientos nocturnos que se producen en Cabo Cañaveral. Una vez que todas las etapas del cohete se consumieron,
Phoenix inició su camino en solitario hacia el polo norte marciano. Su amartizaje se produciría en el Vastitas Borealis, más al norte de la región marciana de Arcadia Planitia. Gracias a las imágenes de alta resolución de
Mars Reconnaissance Orbiter se pudieron descartar zonas peligrosas, y la región finalmente elegida (llamada Green Valley por sus controladores) estaba plagada de terreno poligonal, muy similar al que se da en la Tierra en la región ártica.
Un par de meses antes de que Phoenix llegara al planeta rojo, los tres orbitadores que funcionaban (y lo siguen haciendo) alteraron sus órbitas para una mejor recepción de las primeras palabras para que cuando el nuevo aterrizador se posara en Marte, escucharle con sus oídos bien abiertos, y además, intentarían ver como el conjunto de reentrada entraba en contacto con la atmósfera. Todo eso sería el 25 de mayo del 2008.
Llegó el día de la maniobra más peligrosa y crucial de toda la misión: la toma de Marte. Lo primero, orientar el escudo de reentrada para ofrecerlo hacia la atmósfera, utilizando los propulsores de la sonda. Una vez la maniobra culminaba, la fase de crucero
se separaba. En ese momento solo le quedaban 5 minutos para el aterrizaje. 30 segundos después entraba en contacto con la atmósfera, para decelerar usando el rozamiento atmosférico. Una vez la atmósfera era atravesada, un mortero se activaba para desplegar lo más rápidamente posible el paracaídas, y cuando se había abierto por completo, el escudo de reentrada se separaba, y el radar de altitud comenzaba a tomar datos para completar el proceso del amartizaje. Tres minutos antes del aterrizaje las patas se desplegaron, paso previo a la separación, que se produjo 29 segundos antes de tocar el suelo. Medio segundo después, los
propulsores de descenso (controlados mediante pulsos de ignición para una mayor estabilidad de
Phoenix en el descenso) se activaban para la última fase del proceso, y así recorrer los últimos metros, y cuando las patas acababan posándose en el suelo, los motores se desactivaban, finalizando el proceso. Era en ese momento cuando los disparadores pirotécnicos se activaban y los mástiles de las cámaras y los sensores meteorológicos se desplegaban. Los paneles solares se desplegaron 20 minutos después del aterrizaje, para dar tiempo a que el polvo levantado por los retrocohetes se volviera a posar, y así no tener problemas de acumulación de arena en ellos. Antes, había enviado ya la señal indicadora de que estaba en el suelo del Green Valley, y que había sobrevivido.
Gracias a la preparación de sus órbitas, los relés UHF de
Mars Odyssey y
Mars Reconnaissance Orbiter comunicaron instantáneamente con el vehículo, y gracias a las mediciones de telemetría de las comunicaciones, fijaron las coordenadas en 68’2º N, 125’7º W. Esas coordenadas estaban casi fuera de la elipse prevista para su amartizaje. Los datos de ingeniería transmitidos por Phoenix indicaban que, por motivos desconocidos (posiblemente algún pequeño error en los comandos de la programación), el paracaídas se había desplegado 7 segundos más tarde de lo previsto, provocando esta enorme desviación, que casi provoca que acabara dentro de un cráter cercano llamado Heimdall. Gracias a MRO y a su poderoso objetivo pudimos ver a
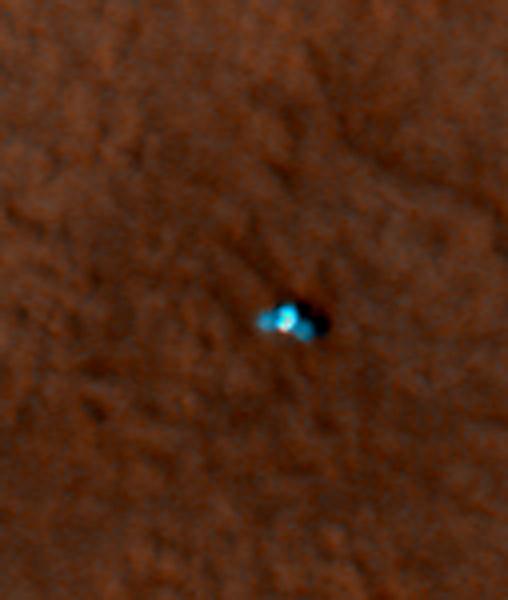
Phoenix ya en superficie, con sus paneles solares
desplegados, 11 horas después del amartizaje, y localizando también el escudo de reentrada y el paracaídas unido a la aerovaina. Pero lo mejor fue que consiguió tomar una de las imágenes más asombrosas de toda la historia de la exploración espacial:
Phoenix colgando del paracaídas cayendo hacia Marte. Impresionante.
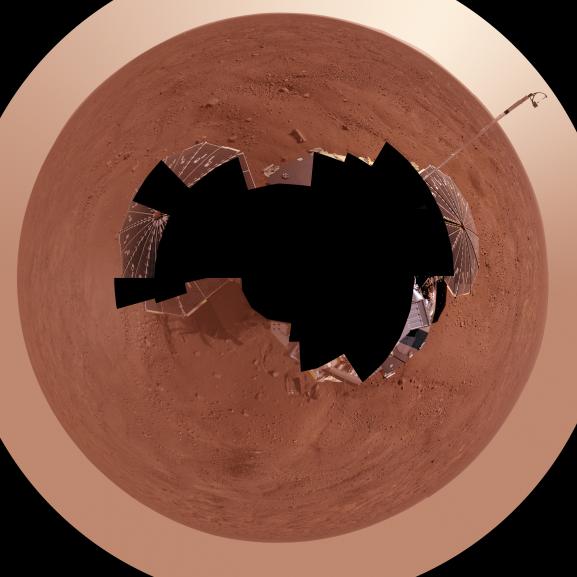
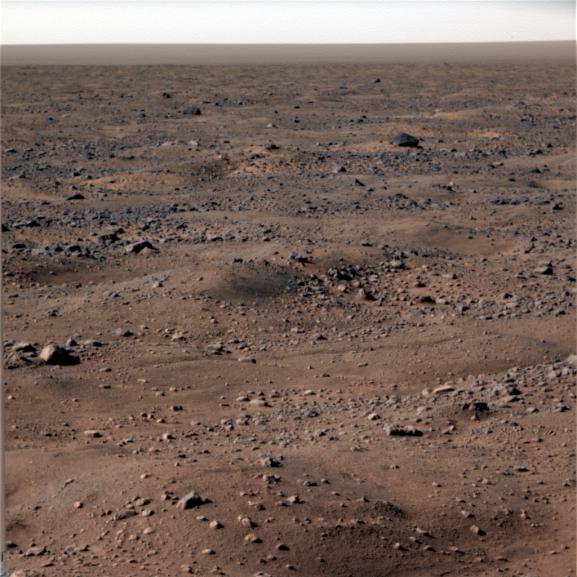
Las primeras imágenes llegaron horas después. El paisaje era llano, anodino. El único relieve destacado era el perfil del cráter Heimdall. A su alrededor, todo eran terrenos
poligonales, y escasas rocas. Entre otras imágenes, también confirmó que las patas tocaban tierra firme, y que los paneles solares estaban correctamente desplegados. Cuando
Phoenix llegó a Marte, el Sol estaba presente durante todo el día, proporcionando la capacidad de funcionar a lo largo de las 24 horas y 39 minutos que dura el día marciano, aunque no fue hasta pasada una semana después del amartizaje cuando se usó esa posibilidad. Una vez se comprobó que el funcionamiento de todos los instrumentos era correcto, se decidió desplegar el RA. El primer intento se hizo el 27 de mayo, aunque la orden nunca llegó ese día a
Phoenix a causa de que el relé UHF Electra de MRO estaba en ese momento desconectado. Finalmente, al día siguiente, la orden llegó, la biobarrera se retiró, y el RA
cobró vida por primera vez.
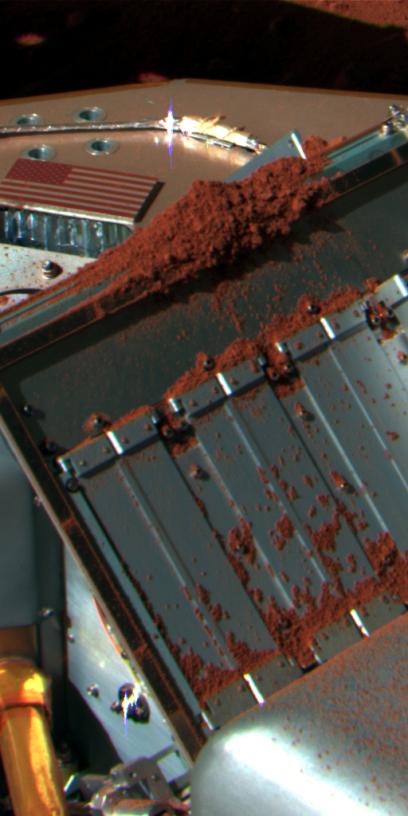
La suerte había querido que el área en el que
Phoenix había aterrizado coincidiera con un polígono del terreno, a mano para que el RA trabajara en él para buscar permafrost, o el hielo de agua fruto de la condensación de la atmósfera que se acaba posando en la superficie, para luego acabar en el subsuelo, generando esas formas. Aprovechando el primer movimiento de contacto con la superficie, el RAC fue usado para ver lo que había debajo de la sonda, y vio una extraña
formación que había sido limpiada por el uso de los retrocohetes.

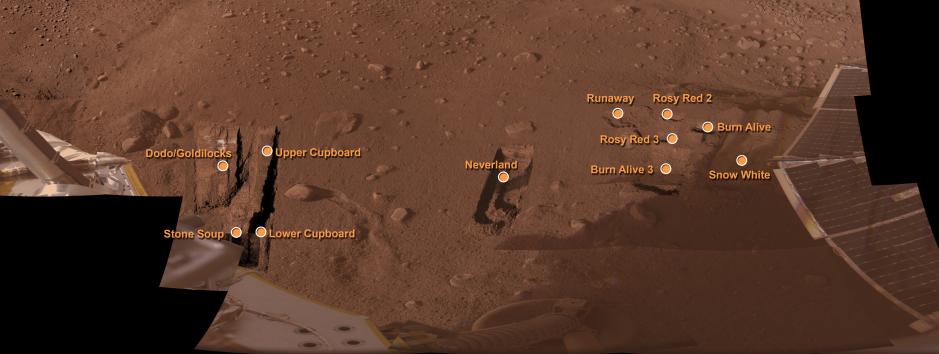
La primera zona de excavación, también denominada trinchera, recibió el nombre de Dodo Goldilocks. La primera palada en esa localización iría para el TEGA, para analizar esa primera muestra para un estudio preliminar. De inmediato surgieron dos imprevistos. El primero era que las puertecillas que permitían el acceso a la muestra hacia el contenedor no se abrieron por completo, dejando poco espacio, mientras que el segundo era que la muestra de terreno se había quedado como pegada en el interior de la pala.

Tuvieron que ensayar varias veces el proceso de vaciarla para evitar que quedara todo allí dentro. El TEGA seguía dando problemas, en esta ocasión era el filamento que calentaba el hornillo. Un cortocircuito intermitente provocó un pequeño fallo electrónico en el mecanismo que activaba este filamento. Por suerte, equipaba un segundo filamento de reserva, y fue programado para que actuara en lugar del primario, pasando éste a ser el de reserva. El 11 de junio la primera muestra de suelo marciano por fin entró en uno de los hornillos del TEGA, y el análisis mostró que en esa muestra no había rastros de hielo de agua. La sorpresa llegó días después, cuando una nueva excavación en Dodo Goldilocks dejó al descubierto un material brillante, del que se soltaron varios fragmentos. 4 soles más tarde, esos fragmentos habían
desaparecido. Quedaba claro que eso era hielo subusperficial que al quedar al descubierto se había sublimado. Fue la primera pista de que bajo las patas de
Phoenix había hielo de agua.
Los primeros tests del MECA se efectuaron a finales de junio, y sus resultados mostraban la gran acidez del suelo marciano (pH de 8 o 9) y una moderada alcalinidad. Se encontraron iones de magnesio, sodio, potasio y clorhidratos. La salinidad del terreno parecía ser baja. Esto, unido a nuevos análisis del TEGA, que por fin detectaron agua en cantidades apreciables, dibujaban un panorama que parecía propicio para la vida. Otros resultados mostraban sales de perclorato, un elemento no muy amigable con los elementos biológicos, por lo que se dedujo que las probabilidades de que allí existiera vida microscópica eran más bien escasas. Estos resultados y el buen funcionamiento general de
Phoenix permitieron la prolongación de la misión.
La estación meteorológica controló desde el principio el
clima en el Green Valley, mostrando cielos claros, viento moderado en dirección sur y dirección este, temperaturas estables entre los -30º C y los -79º C, y las cámaras ayudaron permitiendo ver cómo a lo largo de los soles la cantidad de polvo atmosférico fue en aumento. Otras imágenes dejaron impactados a los controladores: era el seguimiento del Sol por el
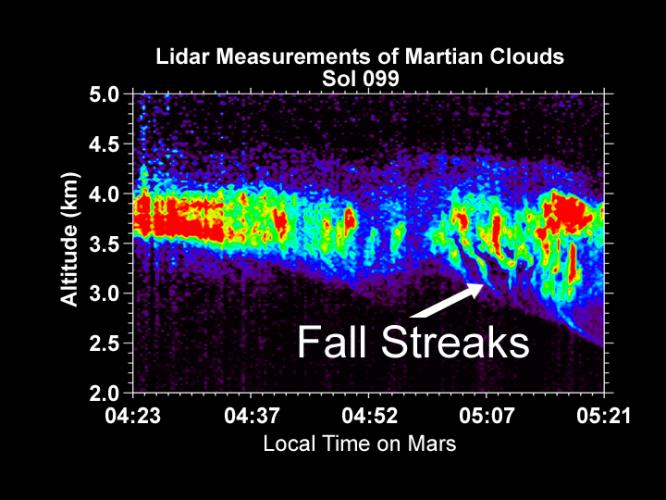
horizonte, viendo cómo nunca llegaba a ponerse durante los dos primeros meses de misión. Empezaba el Sol alto sobre el horizonte, bajando hasta casi el suelo, para luego volver a subir. Son las primeras imágenes de esta actividad solar polar fuera de la Tierra. En cuanto al LIDAR, comenzó su funcionamiento el tercer día, y comenzó a sondear la atmósfera. Los datos recogidos por él mostraron la evolución del polvo atmosférico a lo largo de los días, mostrando la evolución y cantidad que había a lo largo de las horas, evidenciando que en altitudes superiores a los 4 kilómetros apenas se detectaba talco marciano. También se examinaron las nubes (el SSI vio nubes de cirros recorriendo la atmósfera), y en una ocasión detectó una
nevada, que a los 3 km. sobre la superficie se detenía y sublimaba hacia la atmósfera de nuevo. Detectar este fenómeno fue una sorpresa, nadie esperaba observar algo así en Marte.
Con la prolongación de la misión,
Phoenix comenzó a experimentar las primeras puestas de Sol. En el intermedio, había abierto nuevas trincheras en el terreno, y fueron examinadas en detalle. La temperatura caía en picado, y las actividades del aterrizador tuvieron que reducirse drásticamente. Una mañana, al despertar, consiguieron ver el suelo lleno de
escarcha, que obviamente fue registrada y medida. Llegó el mes de octubre, y la situación fue a peor. Cada vez había menos horas de luz, provocando que la energía no fuera la suficiente para la operación de los instrumentos. A causa de la escasa iluminación, el 28 de octubre entró en modo seguro provocado por la escasa energía captada por los paneles solares. Los controladores intentaron un método para prolongar el período de actividad, desactivando varios calentadores internos. Al día siguiente volvió a entrar en modo seguro, y los controladores desconectaron otros calentadores, los relacionados con el TEGA, el RA y los mecanismos pirotécnicos. Sin embargo, la misión estaba acabada. Su última transmisión se recibió el 2 de noviembre. Nos envió en código binario un breve mensaje que, traducido a nuestro lenguaje, puso el epitafio a la misión: triunfo.
La misión
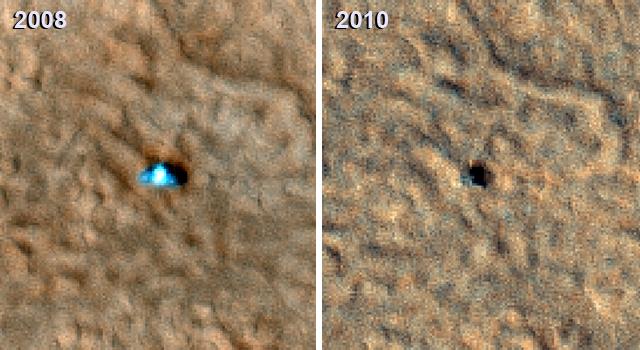
Phoenix había acabado, y comenzó el período de examen de todos los datos que ésta nos transmitió. Sin embargo, existía la pequeña probabilidad de que una vez acabado el invierno en el polo norte, cuando la luz volviera, el pequeño aterrizador volviera a la vida. No había sido diseñada para ello, y se suponía que la escarcha acumulada en los paneles solares podría echar a perder las células
captadoras de energía. En enero del 2010 comenzaron los intentos, vía
Mars Odyssey o vía MRO, de contactar con
Phoenix. A lo largo de los meses de febrero y abril las sesiones de comunicación continuaron, pero imágenes tomadas desde la órbita por MRO mostraron que la sonda ya no volvería con nosotros. Sus paneles solares se habían desplomado, a causa del hielo acumulado (se habían calculado hasta 19 cm. de espesor de hielo) cuando el casquete polar norte se extendió hacia el sur, cubriendo la región del Green Valley. No había que estar tristes, ya que era algo esperado. El 24 de mayo del 2010 el proyecto
Phoenix fue declarado oficialmente cerrado.
Los resultados que
Phoenix nos devolvió confirmaban muchas de las teorías que se habían formulado sobre esa región. Mostró un suelo lleno de polígonos de hasta 3 metros de diámetro, divididos por surcos de hasta 50 centímetros, provocados por los cambios de temperatura y la retracción y extensión del hielo. Las rocas eran de pequeño tamaño, y no había dunas por ninguna parte. Los medidores meteorológicos midieron temperaturas medias de unos -65º C (-19.6º C la máxima, -97.7º C la mínima), mostrando que las nubes que se formaban estaban cargadas de cristales de hielo, y de una de esas nubes de cirros se detectó una nevada pequeña que no llegó a la superficie. La velocidad media del
viento era de unos 36 km/h, y la presión atmosférica era apenas superior a los 8 milibares. En cuanto a los datos de los analizadores, confirmó la presencia de hielo de agua a apenas unos centímetros de la superficie (la formación de debajo de
Phoenix era una capa de hielo que se fracturó con el tiempo por la sublimación del hielo), y los análisis químicos mostraron que el clima de la zona fue más cálido y húmedo en el pasado. Un estudio posterior dejó abierta la posibilidad de encontrar componentes orgánicos en el suelo marciano. En cuanto a la
composición química del suelo, se encontraron clorhidratos, bicarbonato, magnesio, sodio, potasio, calcio y trazas de sulfatos, y el pH exacto de la superficie era de 7.7. La aparición del perclorato abre la posibilidad de utilizar el suelo para fabricar combustibles de cohetes, o para la producción de oxígeno para respirar. En algunas circunstancias, incluso puede servir como alimento de diversos microorganismos. Otro resultado interesante fue que la mezcla de estos percloratos con el suelo provocaba un punto de congelación muy bajo, de similar manera que la sal aplicada a las carreteras evita que en éstas se formen placas de hielo.
Sin duda, Phoenix nos ha abierto una ventana nueva sobre las condiciones marcianas en el pasado y las que se pueden dar actualmente. Con años de retraso, y cambiando el polo sur por el norte, los objetivos de Mars Polar Lander se han cumplido con creces, aunque nos queda la espinita de saber qué podría habernos enseñado la sonda perdida en 1999. Además, Phoenix llegó a Marte en el momento en que existían allí otras 5 sondas, tres orbitales y dos de superficie, y fue la primera vez que tres aterrizadores trabajaban a la vez en el suelo del planeta rojo. En fin, una misión excepcional que merecía un rincón en esta crónica.








.jpg)












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}