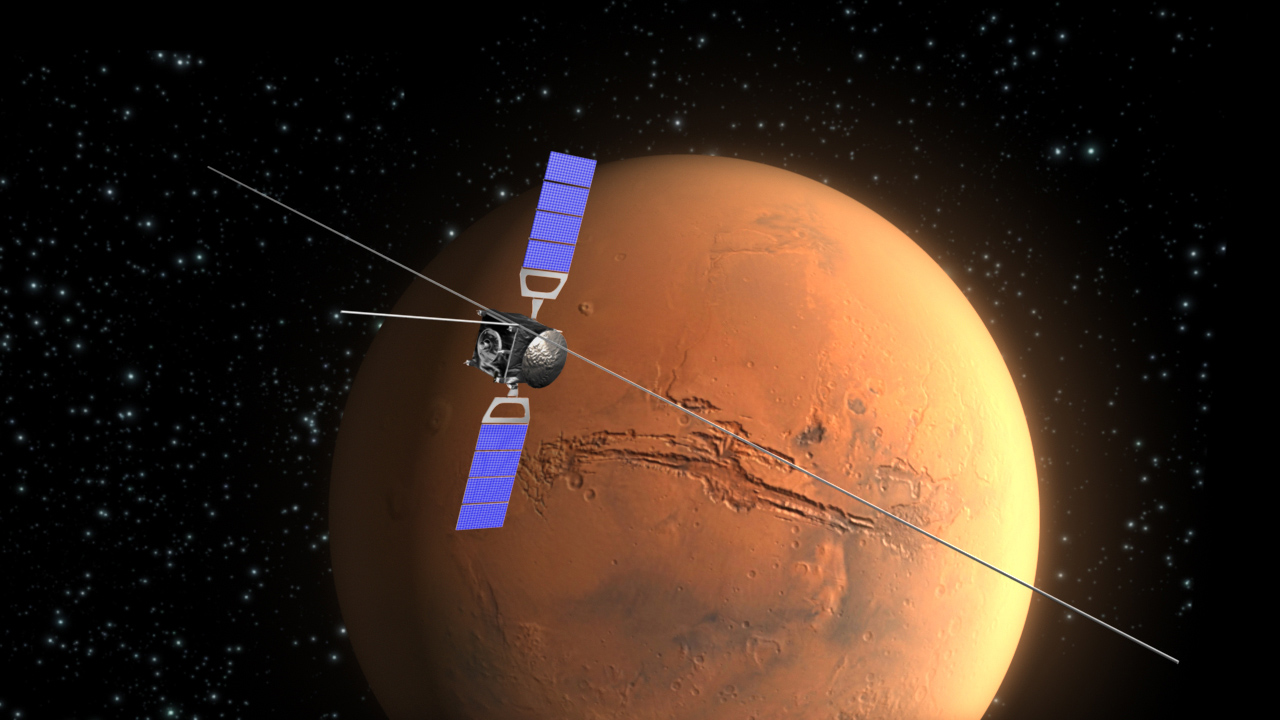
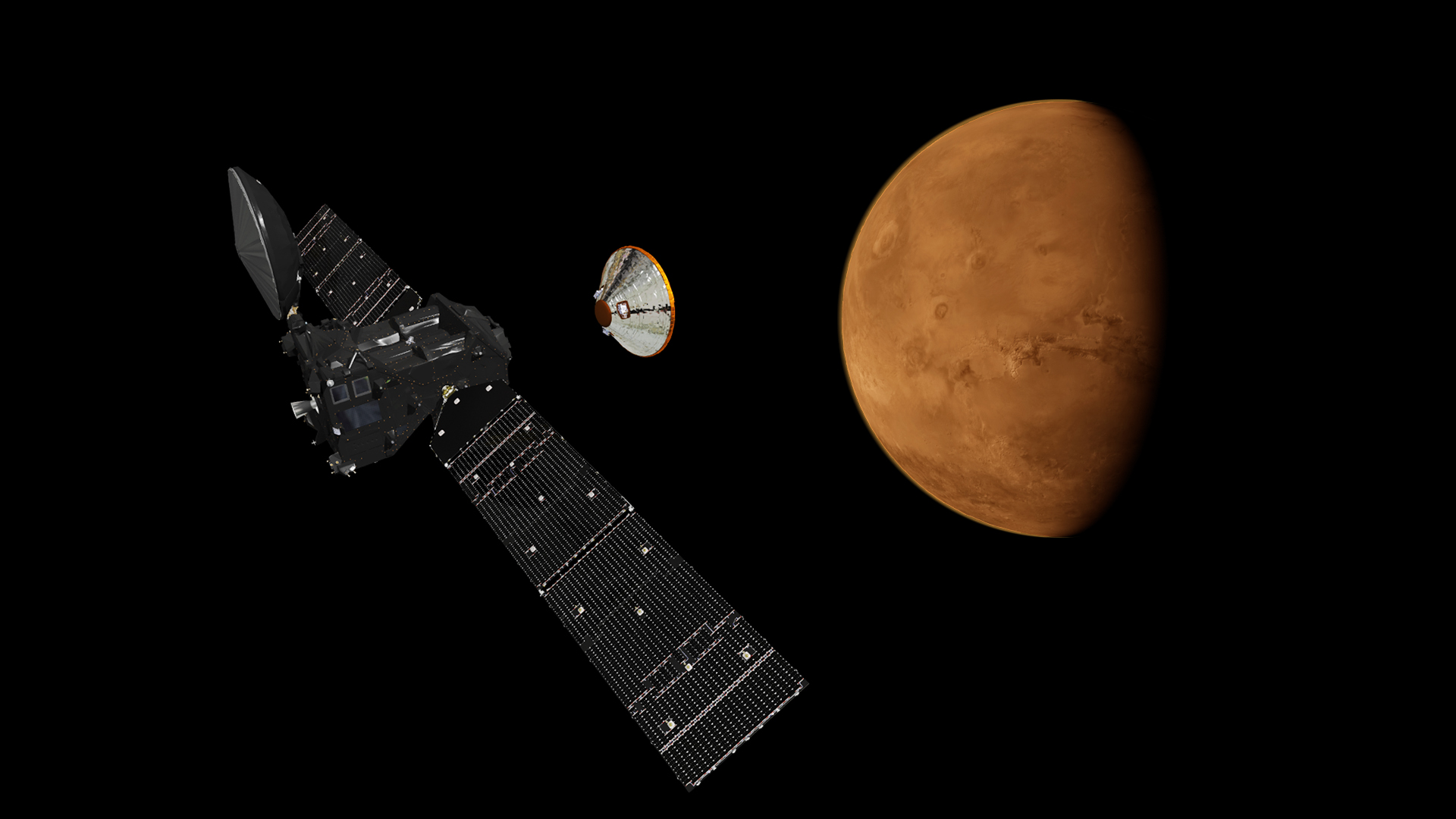
El orbitador responde al nombre de ExoMars
Trace Gas Orbiter, o ExoMars TGO,
y ha sido desarrollado casi por completo por la ESA. No se parece en nada a su
antecesora Mars Express, ya que
mientras que el veterano orbitador emplea una estructura en forma de caja, ExoMars TGO emplea un bus rectangular, o
así. El núcleo de la estructura (como es norma en casi todos los orbitadores)
es un cilindro central de 1.2 metros de diámetro que supone la

principal pieza
estructural del conjunto, y sobre la cual se han instalado todos los soportes y
piezas que le dan su forma definitiva, además de ser el interfaz entre la sonda
y la última etapa del lanzador, y en su interior alberga el tanque de
combustible y el propulsor principal de a bordo. La sonda está realizada
enteramente en aluminio, empleando secciones con núcleo en forma de panal de
abeja, y sobre ellas, láminas homogéneas en sus lados internos y externos. Una
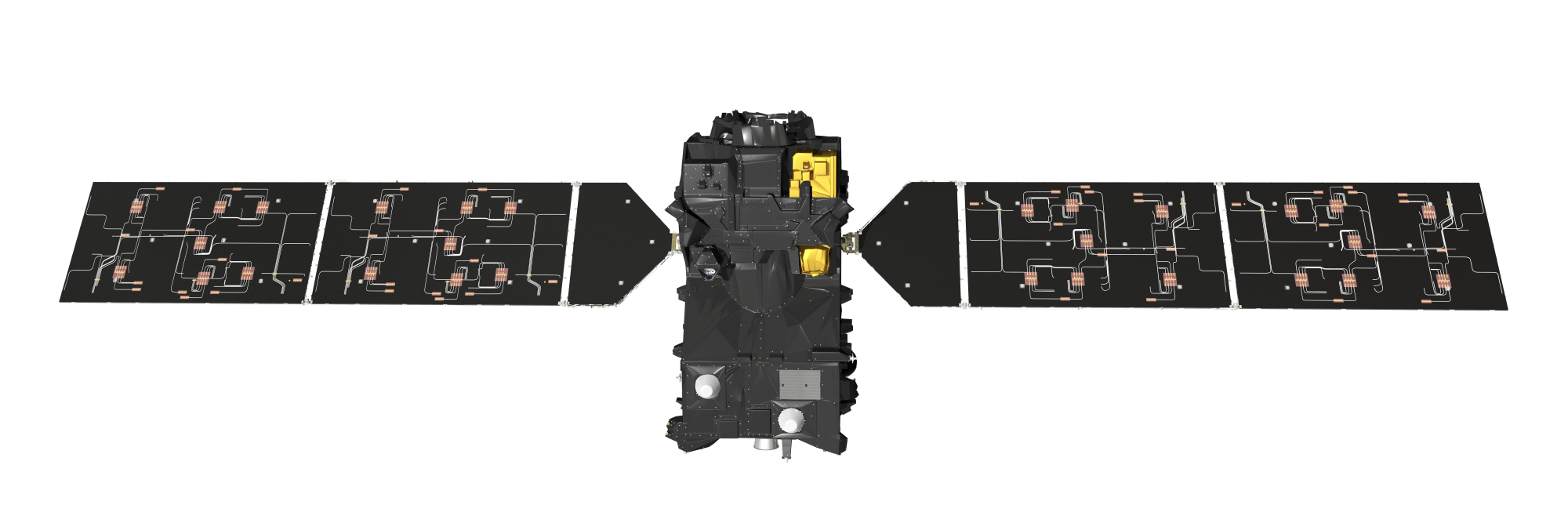
vez en el espacio, tendrá unas medidas de 3.5 metros de alto, dos metros de
lado, dos de ancho, y una envergadura de 17.5 metros con los paneles solares
extendidos. La estructura ha sido realizada por la firma alemana OHB, con sede
en Bremen. Sobre ella se han ido instalando los distintos componentes del
hardware. Su ordenador se basa en las actuales infraestructuras empleadas por
la ESA, con un procesador ERC-32 al mando de todos los procesos y operaciones
realizadas a bordo, y acompañado de un grabador de estado sólido de gran
capacidad (128 gigabits) para almacenar tanto telemetría de ingeniería como datos de los
instrumentos. Esa información sería inútil si no se enviara a la Tierra, por lo
que dispone de un sistema de comunicaciones normal: trabajando en banda-X,
dispone de una antena de

alta ganancia de 2.2 metros de diámetro (herencia Rosetta) situada sobre una plataforma
móvil en dos ejes, lo que le permitirá apuntarla hacia nuestro planeta en todo
momento. Para otras situaciones (primera fase tras el lanzamiento, maniobras de
corrección de rumbo, entradas en modo seguro) empleará las dos antenas
omnidireccionales de baja ganancia. Como otros orbitadores actuales, también tiene
equipo para comunicar con los vehículos situados en la superficie.
Suministrados por la NASA, ExoMars TGO
equipa dos relés UHF Electra (conectados a una antena helicoidal), paquetes de
alto rendimiento que no solo sirven para enlazar con los rovers o plataformas
estáticas para compartir datos y comandos de forma bidireccional, también
permite establecer con un alto grado de exactitud la posición de estos recursos
de superficie, algo útil cuando se trata de elementos autopropulsados. La
energía la recoge del Sol, empleando dos paneles solares gemelos de dos
secciones cada uno (sobre plataformas rotatorias en un eje) cubiertos de
células de alta eficiencia (20 metros cuadrados de superficie activa),
alimentando los sistemas de a bordo, y cargando dos baterías de ión-litio.
Estabilizada en sus tres ejes para su orientación, mantendrá siempre una de las
caras mirando a Marte, y para ello emplea dos unidades de medición inercial,
dos escáneres estelares, sensores solares, ruedas de reacción como actuadores para
cambiar la orientación de la sonda, junto con un grupo de propulsores. ExoMars TGO está optimizada para mirar al limbo atmosférico mediante una
serie de maniobras y cambios de actitud nunca antes realizadas en Marte. Para
la inserción orbital, y otras maniobras menores, empleará su motor principal,
que a diferencia de los grupos usados por MRO
o MAVEN, es único, entregando toda la
potencia él solo durante el tiempo necesario. El control termal es el usual, es
decir, mantas multicapa, radiadores (concentrados en los lados antisolares) y
calentadores eléctricos. En la sección opuesta al motor está el montaje para el
módulo demostrador de entrada, descenso y aterrizaje, incorporando las uniones
mecánicas, eléctricas y de datos, además del mecanismo de liberación mediante
sistemas pirotécnicos. La carga útil científica se divide en cuatro

aparatos.
Desarrollado por la ESA,
NOMAD (Vertical y Ocultación para Descubrimiento
Marciano) es un paquete que combina tres espectrómetros. El primero es SO,
Ocultación solar, y es una réplica del canal SPICAV-SOIR de
Venus Express, es decir, un sensor que
equipa un filtro sintonizable acusto-óptico formado por un cristal de dióxido
de telurio que lleva la luz a una rejilla de difracción tipo echelle, y de ahí
al detector de Mercurio-Cadmio-Telurio HgCdTe (refrigerado por un enfriador
tipo Stirling), y servido por una única apertura (un periscopio de tres espejos
planos, uno de ellos inclinado 67.07º para permitir la entrada de la luz) que
apunta hacia el sol para operaciones de sondeo del limbo y de ocultación
estelar. Está sintonizado para detectar el infrarrojo cercano entre 2.2 y 4.3
micrones. El canal LNO, Limbo, Vertical y Ocultación, es idéntico al SO, solo
que registra las longitudes de onda entre 2.2 y 3.8 micrones, y además,

dispone
de ópticas para operaciones de limbo y
ocultación y para mirar a la vertical del planeta (similar al de LNO, solo que
con dos espejos planos, mientras que un tercero motorizado sirve para la
entrada vertical). El tercer canal es UVIS, Ultravioleta y Visible, y emplea,
como el canal LNO, dos aperturas, una para mirar a la vertical planetaria
(sirviendo directamente a un pequeño telescopio) y un periscopio (empleando un
espejo plano para servir al telescopio de recogida) para operaciones de ocultación
y sondeo del limbo, empleando un sistema fuera de ejes (un espejo de colimación
y uno de enfoque), con una rejilla de difracción y un sensor CCD como detector
final (y sobre él un filtro de segundo orden), registrando el espectro
electromagnético entre los 200 y los 650 nm. Para seleccionar entre ópticas, se
emplean cables de fibra óptica para llevar la luz que recogen los dos espejos
parabólicos al espectrómetro. Todo el paquete está controlado por un
microprocesador LEON3. Con esta combinación de espectrómetros, NOMAD es capad
de no solo detectar gases (y partículas de aerosol como polvo en suspensión) en
concentraciones muy pequeñas en la atmósfera, también será capaz de localizar
sus fuentes de emisión. En el modo de ocultación solar, tanto SO como LNO
pueden obtener hasta 300 espectros en cada longitud de onda durante una de
estas operaciones, que durarán unos 5 minutos, completando un perfil
atmosférico desde la alta atmósfera hasta prácticamente la superficie. En el
modo vertical, LNO estudiará la composición atmosférica, además de examinar
características de la superficie marciana como hielo y escarcha, en mediciones
que se realizarán, de media, cada tres o cuatro soles marcianos, para así
examinarlos dependiendo de la luminosidad o del momento del día. Por su parte
UVIS registrará todo el espectro al que es sensible, tanto en vertical como en
ocultación, cada segundo, pudiendo registrar más información sobre moléculas
más interesantes como el ozono o el ácido sulfúrico, además de medir el
contenido de aerosoles en la atmósfera. En modo de ocultación, los tres canales
muestrearán la atmósfera en secciones de un km. cada una para obtener perfiles
verticales de alta resolución; en modo vertical, tanto LNO como UVIS crearán
columnas verticales con resoluciones espaciales de 3 x 12 km. y 5 x 6 km. (alta
y baja resolución de LNO) y 8 x 5 km. para UVIS, ambos recogiendo un espectro
cada segundo, mientras que en el modo del limbo se obtiene información
complementaria, aunque limitada, para apoyar los otros dos modos. Con este
equipo, la misión espera obtener información no solo del dióxido de carbono y
sus derivados, también monóxido de carbono, vapor de agua (y derivados),
dióxido de nitrógeno, óxido nitroso, ozono, metano (y derivados), acetileno,
etileno, etano, formaldehido, cianuro de hidrógeno, sulfuro de carbonilo,
dióxido de azufre, cloruro de hidrógeno, y otros, además de caracterizar su
variabilidad espacial y temporal, recuperando información sobre temperaturas y
densidades totales atmosféricas, mientras que puede localizar lugares de
emisión de gases (por ejemplo, metano en concentraciones tan bajas como 1 parte
por billón de moléculas atmosféricas) en una región de 30 x 300 km. cuadrados,
junto con el estudio de las fuentes y “hundimientos” de gases como monóxido y
dióxido de carbono, vapor de agua y otros gases traza detectados. Además,
empleando el canal LNO en modo vertical, podrá hacer un sondeo de la
composición superficial centrado en zonas ricas en filosilicatos y sulfatos
para tratar de explicar los fenómenos de expulsión de gases, en combinación con
el sensor OMEGA de Mars Express y
CRISM de MRO. Un paquete
tremendamente versátil desarrollado en el Instituto Belga de Aeronomía
Espacial, con contribuciones importantes del Instituto de Astrofísica de
Andalucía, Instituto Nacional de Astrofísica italiano y la Open University del
Reino Unido.

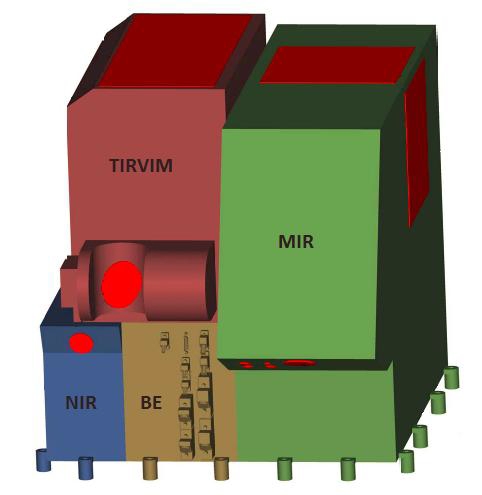
Proporcionado por Roscosmos, ACS (Juego de Química Atmosférica) es
un conjunto de espectrómetros que complementan lo que NOMAD puede conseguir.
Está compuesto de tres canales: NIR, o canal de infrarrojo cercano, es una casi
réplica de los canales SO y LNO de NOMAD, solo que sintonizado para registrar
su longitud de onda entre los 0.7 y los 1.6 micrones, e incorpora ópticas para
observación tanto en la vertical del planeta como para operaciones de
ocultación, y ambas sirven a un conjunto detector final de arseniuro de indio y
galio; MIR, canal de infrarrojo medio, es un espectrómetro del tipo Echelle
siguiendo el concepto de dispersión cruzada, similar al módulo VIRTIS-H a bordo
de
Rosetta y
Venus Express, en el que emplea dos rejillas de difracción, una
Echelle fija y una ordinaria móvil, y solo operará en modo de ocultación solar
obteniendo espectrometría de alta resolución entre los 2.3 y los 4.2 micrones
empleando un detector HgCdTe refrigerado activamente; TIRVIM, Montaje de
Interferómetro en forma de V de Infrarrojo Termal, es un espectrómetro del tipo
transformación Fourier empleando la
configuración de doble péndulo, siendo similar al espectrómetro PFS de
Mars Express, aunque cubriendo el
infrarrojo de 1.7 a 17 micrones en un único canal y con un divisor de haz
elaborado en bromuro de potasio, sirviendo a dos detectores HgCdTe enfriados
mediante un criorefrigerador tipo Stirling (uno para el rango arriba indicado,
otro cubriendo el rango de 1.7 a 4.5 micrones) además de a un conjunto de
detectores piroeléctricos (no necesitan refrigeración) trabajando en el rango
de 1.7 a 25 micrones, y empleará un puerto para visión del Sol (ocultación) y
un escáner para sondeos en la vertical planetaria, y un espejo móvil servirá
para permitir la entrada de una u otra apertura. la operación estará controlada por un microprocesador central, que dispone además de una memoria flash de 32 GB. Con los dos primeros canales,
ACS podrá obtener perfiles verticales de la atmósfera (temperatura y densidad)
tanto del dióxido de carbono como de otros gases menores conocidos como el
metano, vapor de agua y monóxido de carbono, entre otros, en los terminadores
del amanecer y anochecer entre los 10 y los 80 km. de altitud; perfilar ratios
isotópicos de los principales constituyentes de la atmósfera; buscar gases no
detectados como acetileno, etileno, etano, dióxido de azufre, peróxido de
hidrógeno, cloruro de hidrógeno, entre otros; además de hacer búsquedas
altamente sensibles de brillos nocturnos provocados por hidroxilo, oxígeno, u
óxido nítrico, mientras TIRVIM se encargará de derivar perfiles verticales
atmosféricos desde la superficie hasta los 55 km. con una resolución
relativamente alta en la banda de los 15 micrones, especialmente sensible al dióxido
de carbono; monitorizar la cantidad de polvo en la atmósfera así como nubes de
condensación; registrar la temperatura superficial; cartografiar el metano en
el lado diurno con su banda de 3.3 micrones; así como buscar otros gases
desconocidos en la atmósfera marciana empleando su modo de ocultación. Los
módulos NIR y MIR derivan del sistema TIMM-2 de
Phobos-Grunt, mientras el canal TIRVIM lo hace del AOST, también de
Phobos-Grunt. ACS ha sido diseñado
por el Instituto de Investigación IKI de Moscú, con colaboración francesa,
alemana e italiana. Diseñada a la carrera en Suiza,
CaSSIS (Sistema de

Imágenes
de la Superficie en Color y Estéreo) cumplirá las necesidades de la misión de
saber dónde, en alta resolución, existe emisión de gases. Para ello cuenta con
telescopio fuera de ejes con un espejo primario de 13.5 cm. de diámetro, una
longitud focal de 88 centímetros (f/6.5),
sirviendo a un sensor tipo CMOS híbrido, herencia del sistema SIMBIO-SYS de la
misión a Mercurio BepiColombo. El
telescopio emplea tres espejos con recubrimiento de plata, y existe un cuarto,
parcialmente motorizado, que es el que lleva la luz al detector. El sistema no
dispone de rueda de filtros, sin embargo utiliza una placa situada directamente
sobre el sensor, en el que se han construido las tiras que conforman los
filtros usados durante la misión, y también supone herencia de la misión
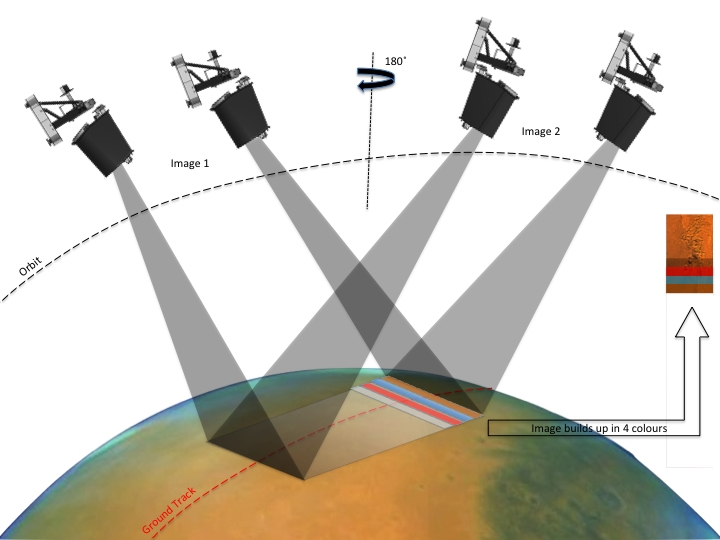
mercuriana. La diferencia es que usa cuatro bandas distintas, especializadas
para la observación marciana, y son: pancromática (650 nanómetros), infrarroja
(0.95 micrones), infrarrojo cercano (0.85 micrones), y azul-verde (475 nm). En
vez de tomar imágenes como si se tratara de una cámara de fotos normal,
empleará una modificación del modo pushbroom denominado “Push-frame”, una
estrategia ya usada en Marte en los sistemas THEMIS de Mars Odyssey y MARCI de MRO.
En este modo, en vez de arrastrar un único conjunto de detectores formado una
fila de píxels, va arrastrando los filtros a medida que va orbitando. Empleando
sus electrónicas de gestión (basadas en BepiColombo,
y usando como corazón un procesador de doble núcleo Leon 3FT) el sistema irá
acumulando barridos de la superficie (hasta 8 km. de ancho desde su órbita de
trabajo, entre medias de los anchos de las cámaras CTX e HiRISE de MRO) en cualquiera de las cuatro bandas
a la que es sensible, combinando una, dos, tres, o las cuatro al mismo tiempo,
creando así imágenes en color real y falso color del suelo marciano, con una
resolución máxima de 4.6 metros. Sin embargo, la clave está en su capacidad de
crear imágenes estereoscópicas sin necesidad de combinar dos observaciones
distintas en dos órbitas distintas. Para ello se ha construido un mecanismo
motorizado que rota completamente el telescopio 180º en al

menos 15 segundos. A
causa de la extraña estrategia de apuntar sus paneles solares a nuestra
estrella, y debido a la inclinación orbital,
ExoMars TGO puede estar mirando levemente hacia delante en la
dirección orbital, de manera que el telescopio apunta y barre una zona
específica de la superficie, y mientras orbita, se posiciona de manera que el
telescopio mira hacia el mismo punto, solo que ya está detrás de la sonda, por
lo que, girando al máximo la cámara, volverá a barrer el mismo punto de la
superficie. De esta forma, creará pares estéreo en aproximadamente 47 segundos,
algo estupendo dado que el sitio a fotografiar tendrá las mismas condiciones de
iluminación. De esta manera, CaSSIS se encargará de obtener imágenes de zonas
identificadas como fuentes potenciales de gases traza emitidos a la atmósfera;
investigar procesos dinámicos de la superficie (vulcanismo, erosión,
sublimación) que ayude a restringir el inventario de gases atmosféricos; y no
menos importante, ayudar a certificar futuros lugares de aterrizaje en busca de
desniveles no aptos para vehículos de superficie. CaSSIS ha sido desarrollado
por la Universidad de Berna, con amplias contribuciones de instituciones
italianas, alemanas y polacas. Y como última contribución rusa,
FREND (Detector
de

Neutrones Epitermales de Resolución Precisa) es la penúltima realización de
la familia de sensores de neutrones que ya han volado a otros destinos del
sistema solar (HEND de Mars Odyssey,
LEND de LRO, DAN de Curiosity) y
pretende continuar el trabajo iniciado por el primero, solo que en alta resolución.
Para ello, cuenta con cuatro contadores proporcionales rellenados con gas
(Helio-3, a una presión de seis bares) y un cristal de escintilación de
stilbene, con protección anticoincidencia, situados detrás de un módulo de
colimación que estrecha el campo de visión para proporcionar una resolución de
40 km., en comparación con los sensores omnidireccionales del HEND de Mars Odyssey, que han creado un mapa con
una máxima resolución de 600 km. Este sistema registrará neutrones con energías
que van de los 0.4 a los 500 keV con los contadores proporcionales, y neutrones
rápidos, de 0.5 a 10 MeV para el cristal escintilador. Acoplado a FREND hay un
dosímetro, denominado Liulin-MO,
encargado de detectar el flujo, dosis absorbida, e intensidad de dosis de las
partículas cargadas de los rayos cósmicos. Usa un colimador, cinco detectores,
y el módulo de control y dosimetría, fijado a la parte superior de FREND. De
esta manera, complementará al sensor RAD de Curiosity
tomando datos complementarios durante el viaje de crucero a Marte, y luego
medirá la dosis en órbita marciana, así como mediciones de dosis en la
superficie del planeta, todo en preparación para un eventual viaje tripulado.
De esta manera, FREND está diseñado para completar un mapa de alta resolución de
flujos de neutrones epitermales y rápidos desde la superficie marciana;
determinar flujos de neutrones y partículas cargadas durante periodos
tranquilos de actividad solar así como en épocas de emisión de partículas
solares energéticas; construcción de mapas de concentraciones de hidrógeno bajo
el suelo marciano a alta resolución; y comparar los datos obtenidos con los
registrados por el DAN de Curiosity,
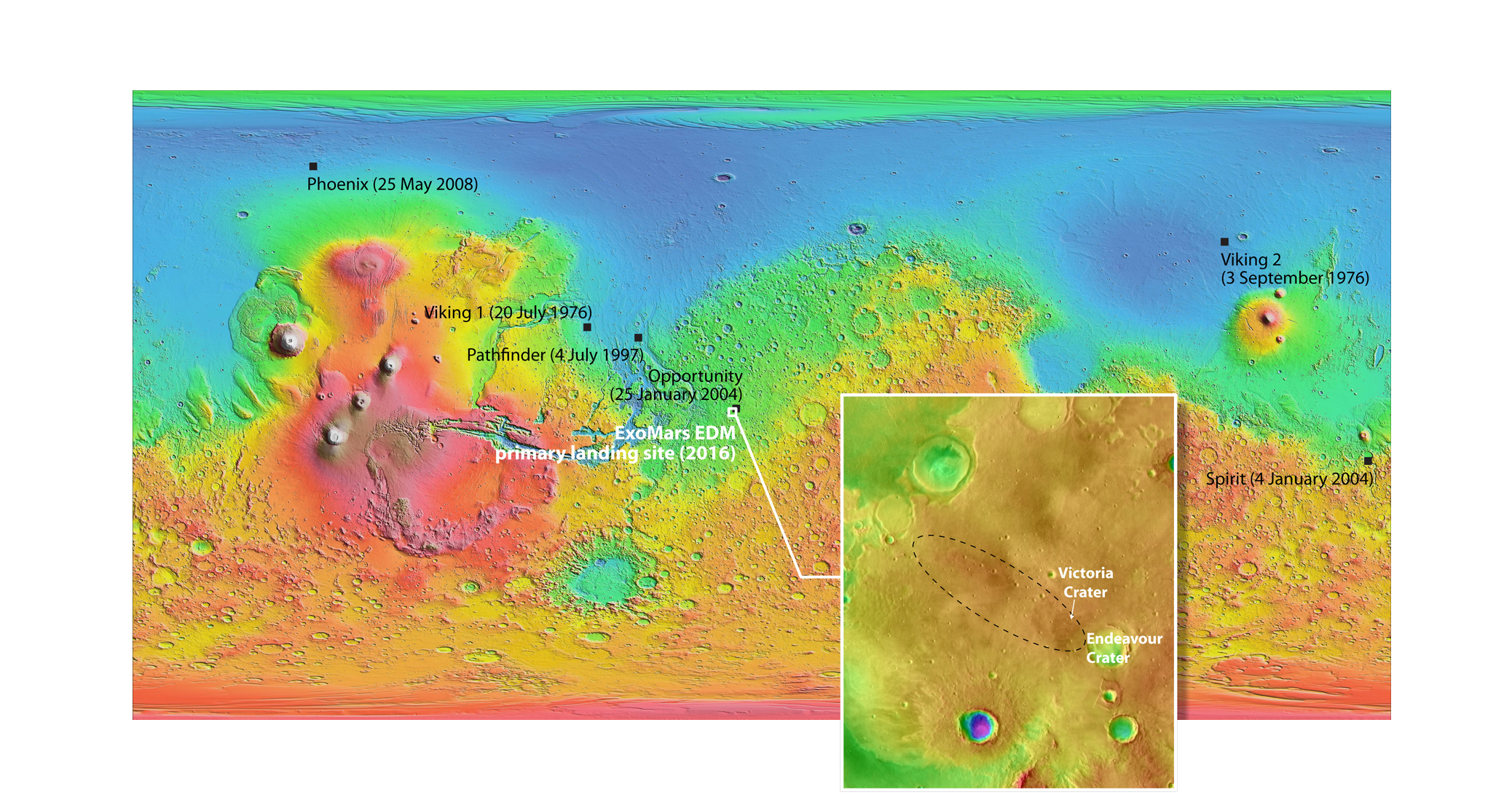
así como del sensor ADRON, que estará instalado en ExoMars Rover, que debe llegar a la superficie marciana en el 2019.
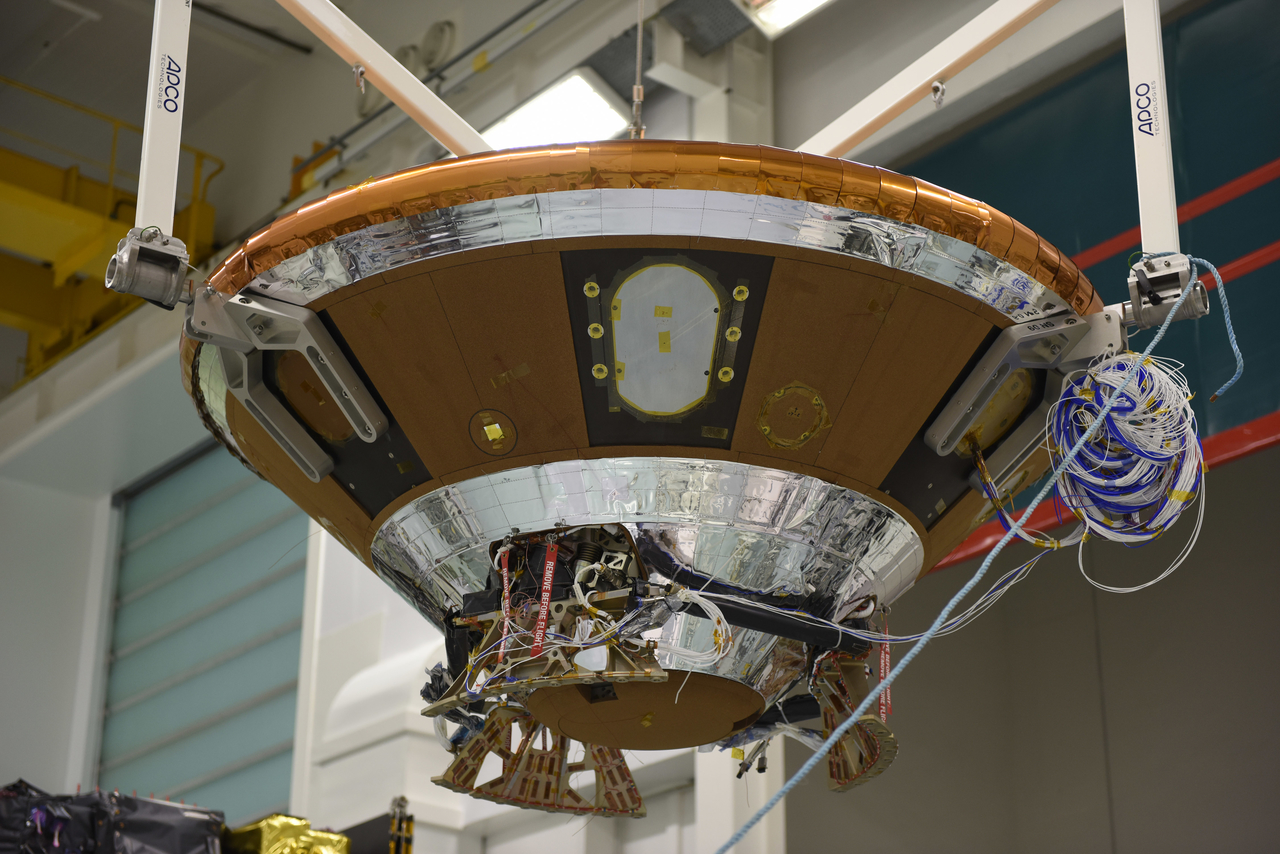
Con su carga de combustible a bordo, ExoMars
TGO declara una masa de 3732 kg. Por su parte, el

Módulo Demostrador de
Entrada, Descenso y Aterrizaje (EDM),
bautizado como Schiaparelli, en honor
al astrónomo italiano que afirmó observar los “canalí” en Marte, es
principalmente un demostrador de tecnologías para situar en el futuro cargas
útiles sobre suelo marciano. Está compuesto por varias partes: aerovaina,
escudo de reentrada, y el propio módulo que se posará en su destino. Todo el
conjunto posee un diámetro de 2.4 metros, y posee la misma forma que otros
sistemas de reentrada empleados en misiones anteriores. El escudo de reentrada,
elaborado en aluminio (núcleo en forma de panal de abeja) y láminas exteriores
homogéneas elaboradas en polímero reforzado por fibra de carbono, tiene en su
parte externa el material que ofrecerá a la atmósfera marciana, un nuevo tipo
de placas ablativas llamado Norcoat Liege. La aerovaina sigue una construcción
similar, salvo que no usa el material ablativo. En el interior de la aerovaina
está el paracaídas que frenará parte del descenso por la atmósfera, y mide 12
metros de diámetro. En cuanto

al propio módulo
Schiaparelli, emplea una plataforma base (construida en SENER
Bilbao) sobre la que se fija todo el hardware que amartizará, que posee un
diámetro de 1.65 metros. Cuenta con su ordenador, sistema de comunicaciones
(transmisor UHF unido a ina antena omnidireccional), unidad de medición
inercial, generación de energía, (mediante baterías), un retroreflector láser y
el sistema de descenso terminal, empleando un radar altímetro Doppler y 9
motores de descenso modulados por pulsos (el mismo tipo empleado para el
aterrizaje de
Phoenix en mayo del
2008). Por todo el vehículo se han dispuesto cientos de sensores, tanto en las
partes que soportarán el contacto con la atmósfera (sensores de medición de
temperatura), sensores de presión, y de telemetría para registrar todos los
parámetros del vuelo, así como un sensor solar para medir la actitud inercial
antes de la entrada. Además, la propia plataforma dispone, en su sección
inferior, de una parte de estructura aplastable, diseñada para amortiguar el
contacto final con la superficie marciana. Se ha diseñado para poder lidiar con
aterrizajes sobre terrenos rocosos con piedras de hasta 40 cm. de altura, o
caer sobre desniveles inferiores a 12.5º. A pesar de estar dedicado a la prueba
tecnológica, también hará ciencia. La investigación AMELIA (Investigaciones y
Análisis de Entrada Atmosférica y Aterrizaje en Marte) empleará los datos
derivados de su unidad de medición inercial durante el descenso para derivar
perfiles de densidad, temperatura y presión con alta resolución espacial, así
como revelar el comportamiento de la polvorienta atmósfera marciana, para así
mejorar los modelos existentes para su uso en misiones futuras. Durante el
descenso también usará su
DeCa, una cámara de descenso monocromática que tomará
secuencias desde la separación del escudo de reentrada hasta la llegada a la
superficie, de forma similar a la realizada por el sistema MARDI de
Curiosity, salvo que lo hará en blanco y
negro, tomando unas 15 imágenes, a una cadencia de una cada 1.5 segundos. Esta
es la única capacidad de
Schiaparelli
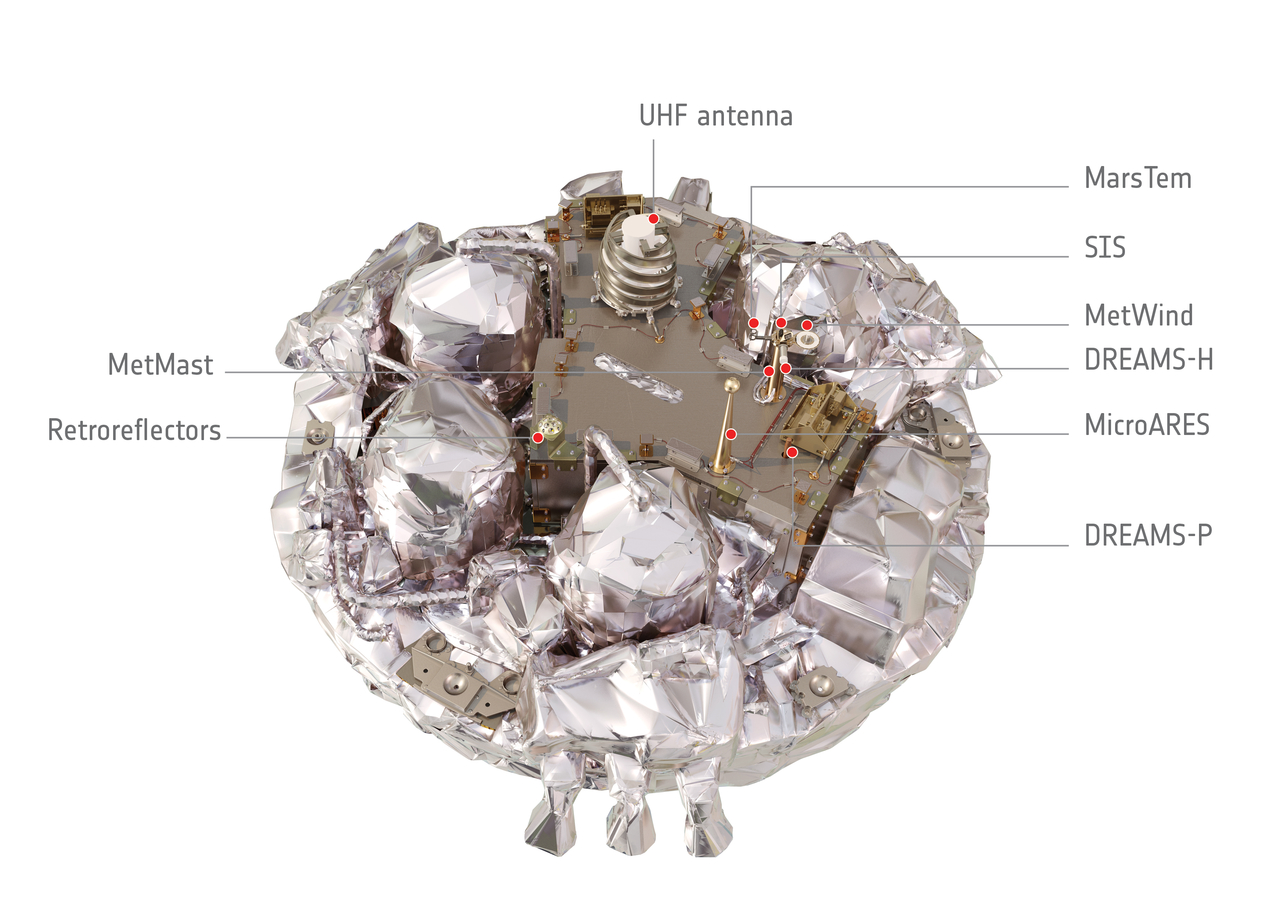
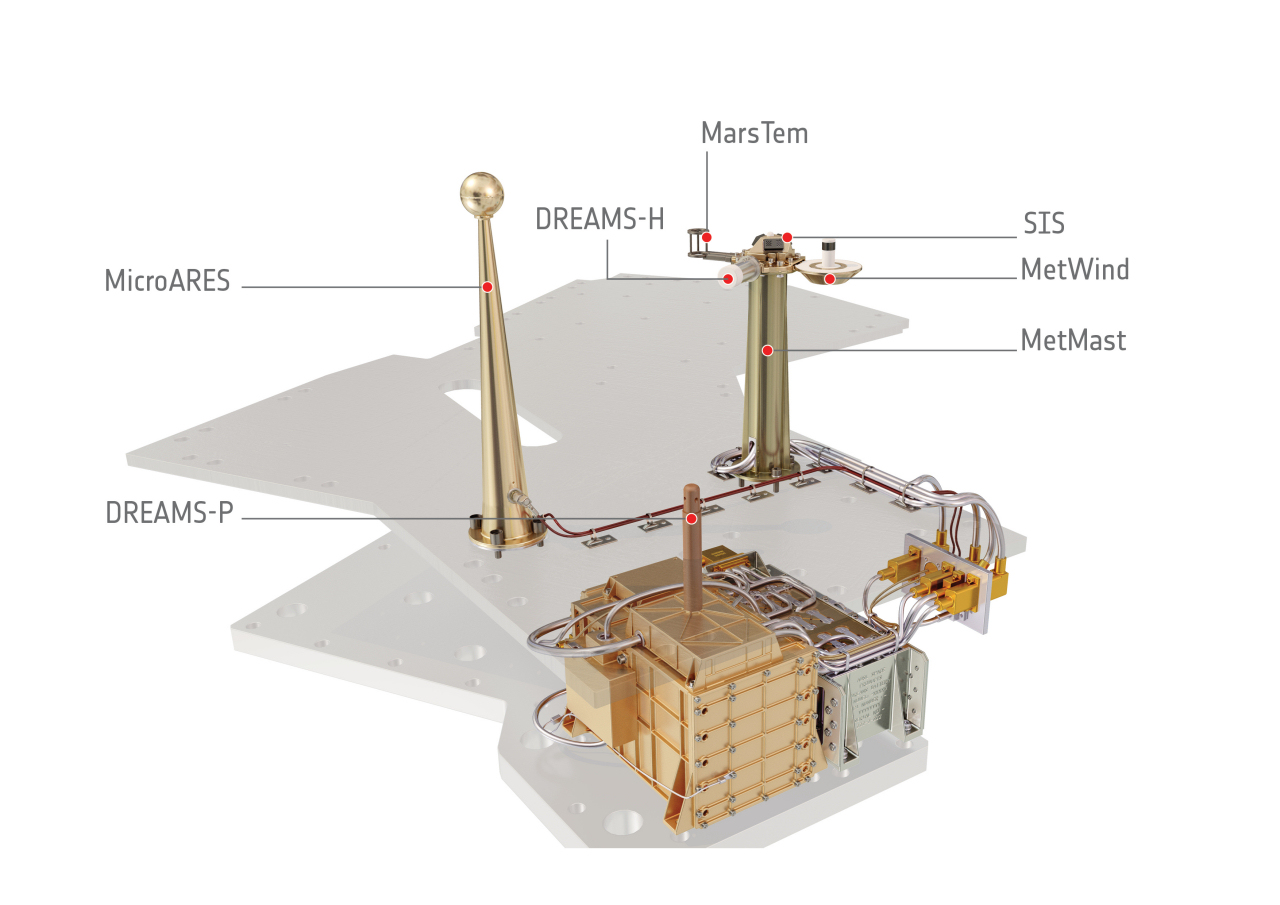
de tomar imágenes en Marte. Una vez en superficie, activará su investigación
DREAMS (caracterización de Polvo,

verificación de Riesgos, y Analizador
Medioambiental en la Superficie Marciana), y es una suerte de avanzado paquete
meteorológico autónomo que incorpora un sensor de viento bidimensional (MetWind,
Universidad de Oxford), un termómetro (MarsTem, Universidad de Padua), un
sensor de presión (DREAMS-P, Instituto Meteorológico Finlandés), un sensor de
humedad (DREAMS-H, Instituto Meteorológico Finlandés), un sensor de campos
eléctricos (MicroARES, LATMOS de Francia, ESA-ESTEC de Holanda), un sensor de
irradiación solar (SIS, INTA) para medir la concentración de polvo atmosférico,
junto con su Unidad de Electrónica Central y una batería independiente. Junto
con las habituales mediciones meteorológicas para caracterizar el estado básico
de la meteorología marciana (temperatura, presión, velocidad y dirección del
viento), ayudará a cuantificar peligros (tanto para vehículos robóticos como
para futuros seres humanos) tales como velocidad del polvo aerotransportado,
carga electrostática, existencia de descargas, “ruido” electromagnético que
pueda interferir las comunicaciones, así como intensidad de radiación
ultravioleta. Sin embargo, lo novedoso es que realizará la primera
investigación de fenómenos

eléctricos en la atmósfera marciana, tales como si
existe una suerte de circuito eléctrico atmosférico global entre la superficie
y la ionosfera; fuerzas electrostáticas por el polvo cargado eléctricamente que
podría afectar a las dinámicas de las tormentas de polvo; así como interacción
entre la superficie y los gases atmosféricos gobernada por campos eléctricos
atmosféricos, que puede tener efectos en los procesos que gobiernan la química
de los materiales de la superficie y la producción de materiales oxidantes en
la atmósfera, lo que puede tener amplio impacto en la sostenibilidad de las
condiciones apropiadas para la vida. Todo el paquete, tras recibir su carga de
combustible, ofrece un peso en tierra de 600 kg. Con los dos vehículos unidos,
la masa máxima en el momento del lanzamiento es de 4332 kg.










{kind=link}