Falta una semana para el
aterrizaje de
InSight en Marte, y es
momento de hablar un poco más de la forma de llegar, y de lo que hará cuando lo
haga. Ante todo, queremos decir que la misión no es la más excitante de las
enviadas a la superficie del planeta rojo. A diferencia de
Mars Pathfinder y
Sojourner,
los MER,
Curiosity, e incluso
Phoenix, han sido, y son, misiones
apasionantes. Por su parte,
InSight
será una misión de sentarse, y esperar. Lo dijimos en su día, y lo repetimos,
no es una misión muy arriesgada, pero aunque sus objetivos llevan buscándose
varias décadas, hasta que se consigan se tardará tiempo. Pero primero debe
llegar.
Por ser lanzado el primer día de
la ventana de lanzamiento, el
5 de mayo, la ruta a Marte le llevará en total
205 días, y a lo largo de la ruta, la sonda ha realizado hasta cuatro maniobras
de corrección de rumbo, y aún existe la posibilidad de hacer más para apuntar
con mayor precisión en su zona de aterrizaje. La ruta ha sido tranquila, con
las actividades normales: chequeos de salud, mediciones de navegación,
comprobación de los distintos instrumentos… El día 26, todo quedará listo. Todo
el proceso de entrada, descenso y aterrizaje será realizado a partir de una
secuencia de eventos cargada en el ordenador. Lo primero es calentar el sistema
de propulsión de los motores de descenso del lander, casi una hora antes del
inicio de la maniobra. Unos siete minutos antes de la entrada atmosférica, toca
la separación de la etapa de crucero. Desde ese momento,
InSight funcionará únicamente con las baterías. Las comunicaciones
pasarán de la antena de media ganancia de la etapa de crucero a una enrollada
en la parte superior de la aerovaina, transmitiendo en banda UHF.
Posteriormente, toca maniobrar, usando los propulsores a través de la
aerovaina, para colocar en posición el escudo de reentrada. Un ángulo demasiado
plano, y la sonda rebotará en la atmósfera. Un ángulo demasiado agudo, y se
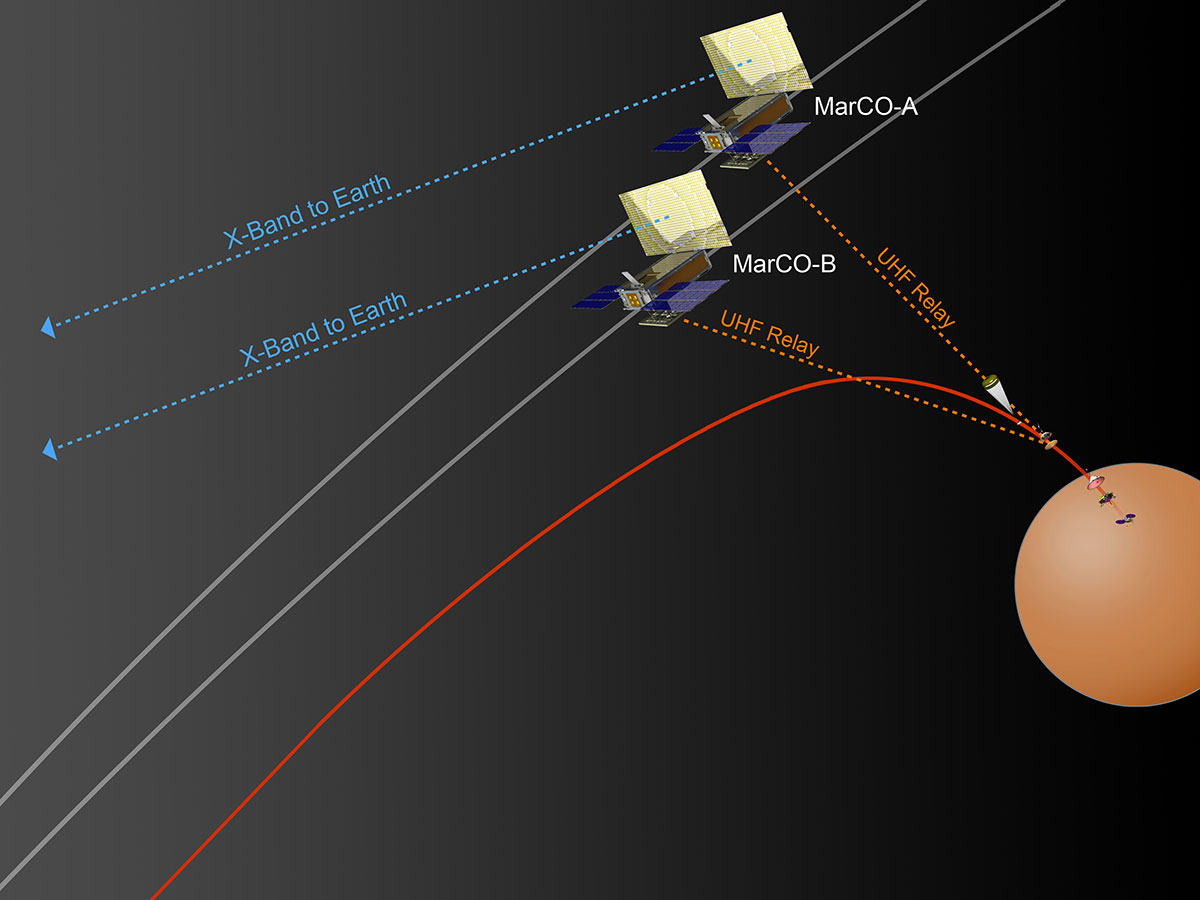
incinerará. Tras la recolocación, comenzará activamente la transmisión de
telemetría comunicando los eventos de la secuencia de descenso. Principalmente,
será
MRO y su relé Electra quien
recibirá toda la información, pero también
estarán los Cubesats
MarCO. En caso de necesidad, varios
radiotelescopios terrestres (Green Bank en Virgina Occidental, Effelsberg en
Alemania, Cerdeña en Italia) podrán recibir las señales transmitidas durante el
descenso. El primer contacto atmosférico se producirá a unos 125 km. de
altitud, comenzando la fase principal de frenado atmosférico, eliminando la
inmensa mayoría de la velocidad con la que llegaba. Durante esta fase,
InSight realizará varias maniobras de
entrada guiada, similar a la ejecutada por
Curiosity,
para mejorar la precisión hacia el centro de su zona de aterrizaje, y “surfear”
por la atmósfera, evitando demasiado calor por la fricción. Aún así, el escudo
de reentrada podrá llegar a temperaturas de hasta 1500 grados, y soportará
deceleraciones de hasta 9 g. Tras atravesar lo más peligroso de la entrada, ya
viajando dentro de la atmósfera, las capas cada vez más densas van eliminando
todavía más velocidad y, cuando sus acelerómetros detecten que la velocidad ha
caído por debajo del umbral prefijado, se disparará el paracaídas, a una
altitud de unos 13 km de la superficie. Al tiempo, el altímetro radar se activará,
al tiempo que una batería auxiliar para proporcionar energía extra. Tras la
separación del escudo de reentrada, ya innecesario, el altímetro empezará a
calcular la distancia de la sonda hacia el suelo, al tiempo que las patas del
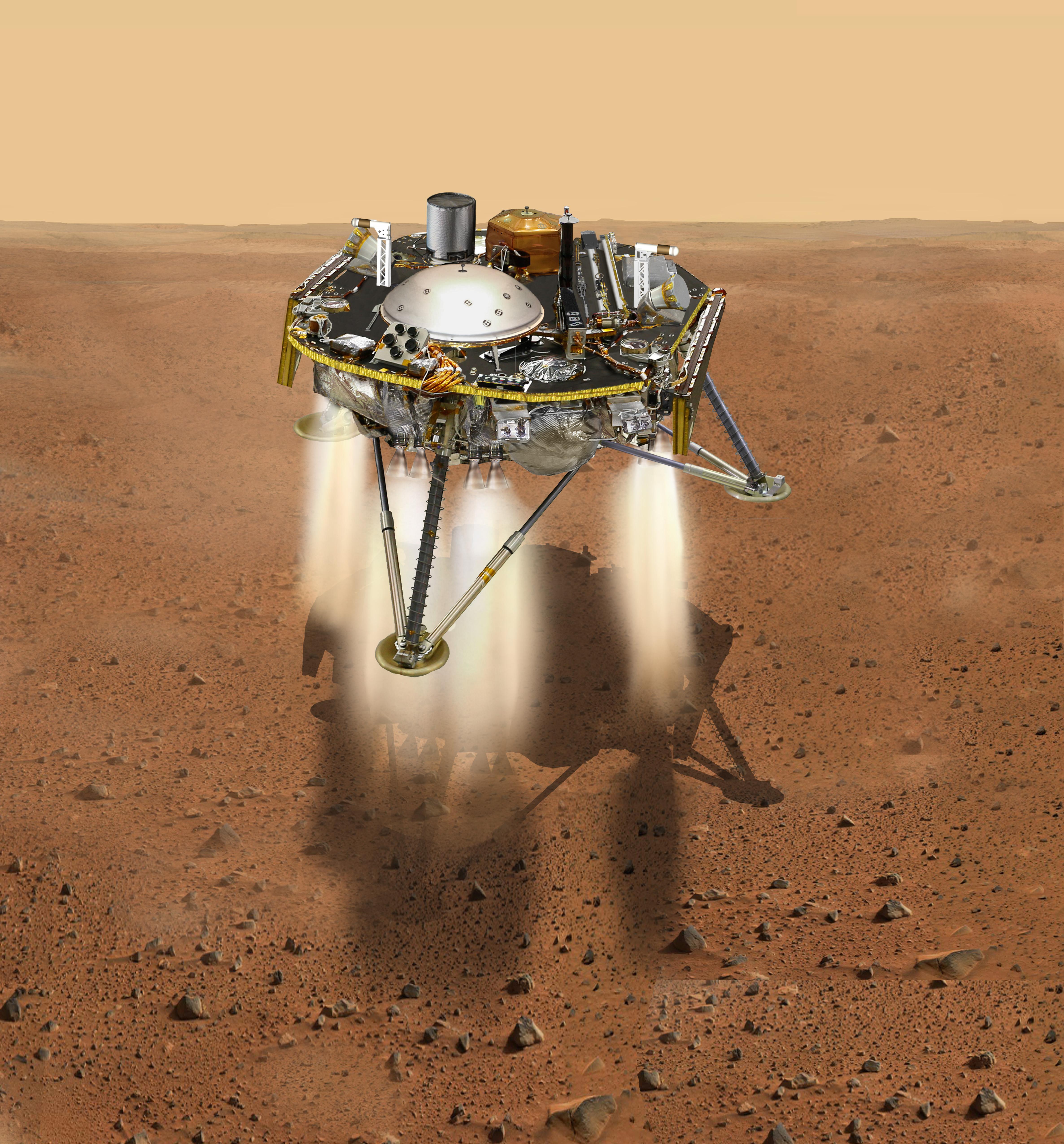
tren de aterrizaje se despliegan. Cuando el radar detecte una distancia al
suelo de 1.2 km, y la velocidad haya descendido por debajo de los 60 metros por
segundo, llega la separación final, con el lander cayendo brevemente antes de
encender los 12 motores de descenso, pero

usando al mismo tiempo los
propulsores laterales para desviarse de la ya vacía aerovaina y paracaídas.
Tras esta separación, las comunicaciones pasan directamente a la antena UHF del
lander, evitando perder datos valiosos. Este momento del descenso se usará para
la reorientación final del lander, para posarse en la posición óptima para su
misión científica. Con el descenso controlado establemente por los motores, la
distancia al suelo disminuirá gradualmente hasta que, al final, sensores de
contacto situados en las patas detectarán el contacto con el suelo, lo que
provocará el comando que ordena el
apagado de los motores. Al disponer de
amortiguadores, las patas ablandarán este último descenso.
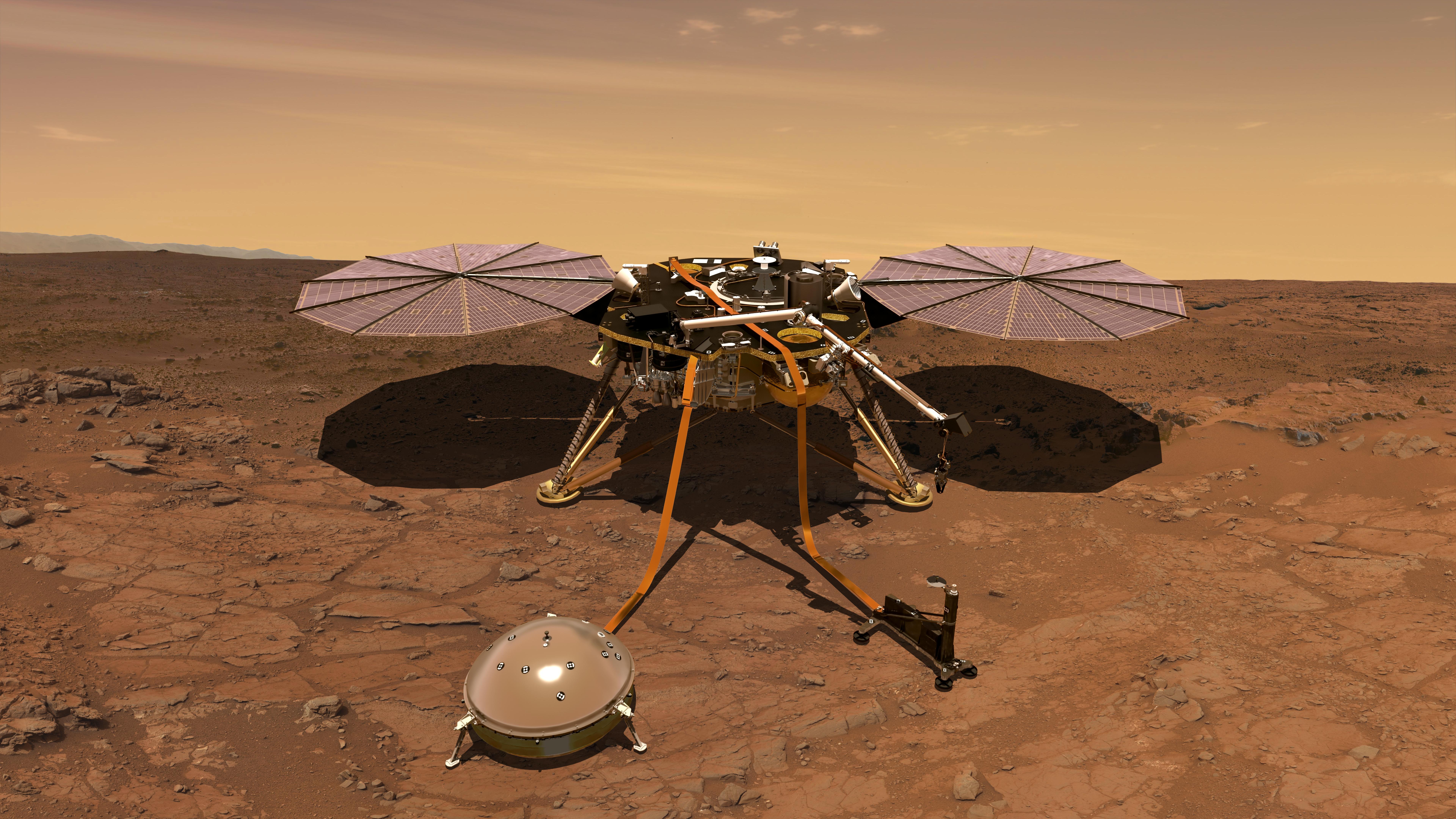
InSight habrá aterrizado, reposando sobre sus tres patas. En la
zona de aterrizaje, serán las dos de la tarde, hora local marciana, y la fase
más peligrosa habrá concluido.
El primer día marciano, o Sol, de
estancia de InSight está marcado como
Sol 0. Nada más contactar con la superficie, lo primordial es transmitir la
señal de que ha llegado, que podrá llegar directamente a través de MarCO, de los radiotelescopios
terrestres, o varios minutos después, de Mars
Odyssey, que pasará sobre Elysium Planitia en ese momento. Para que MRO transmita todo lo recibido habrá que
esperar una hora hasta que su órbita le lleve a volver a estar en contacto con
las antenas terrestres de la red DSN. En superficie, el recién llegado empezará
vaciando todo el combustible que quede (si es que queda), y se dispararán los
dispositivos pirotécnicos que mantienen bloqueados los distintos apéndices. Sus
paneles solares no se desplegarán hasta pasados 25 minutos, para permitir que
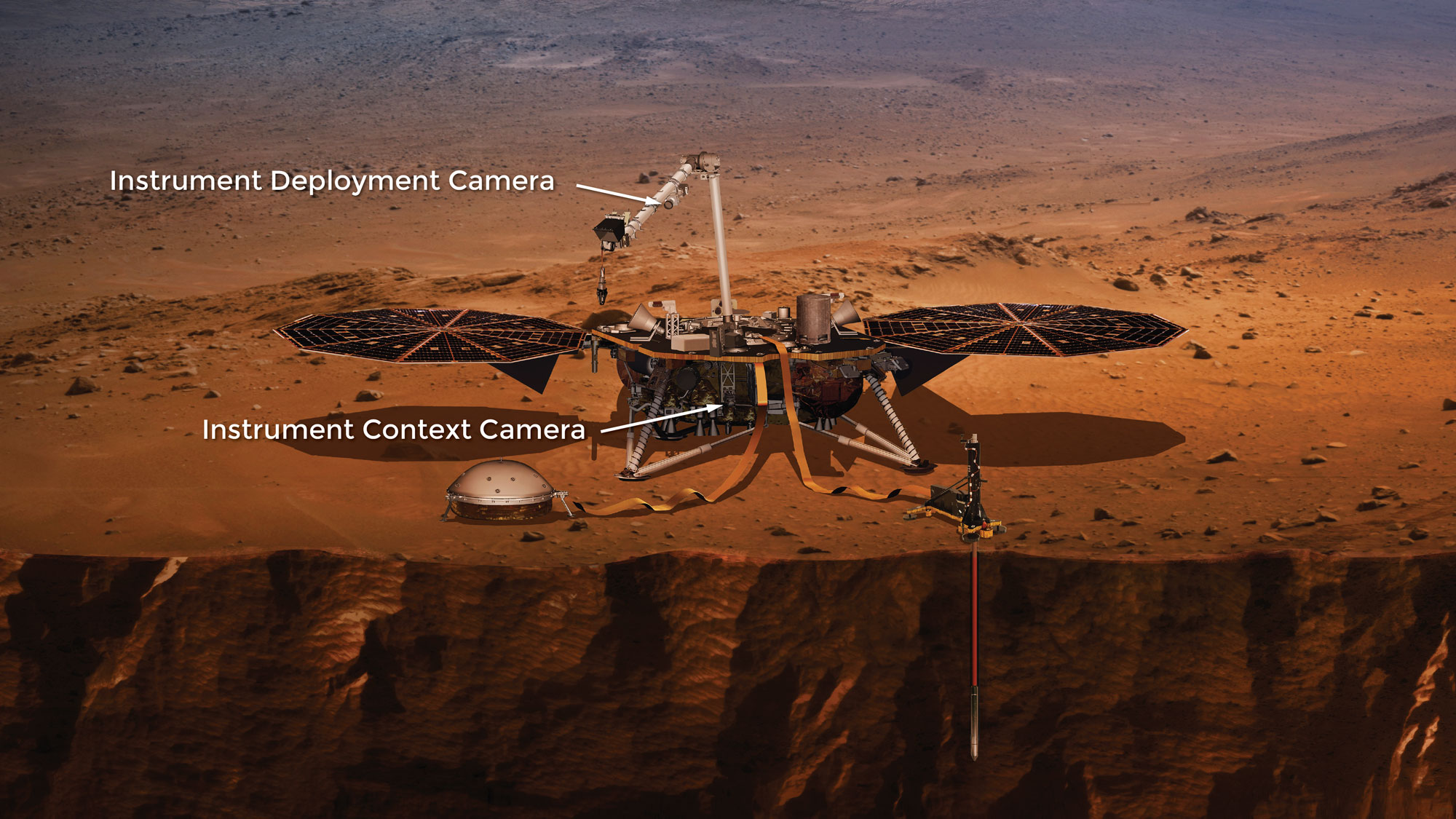
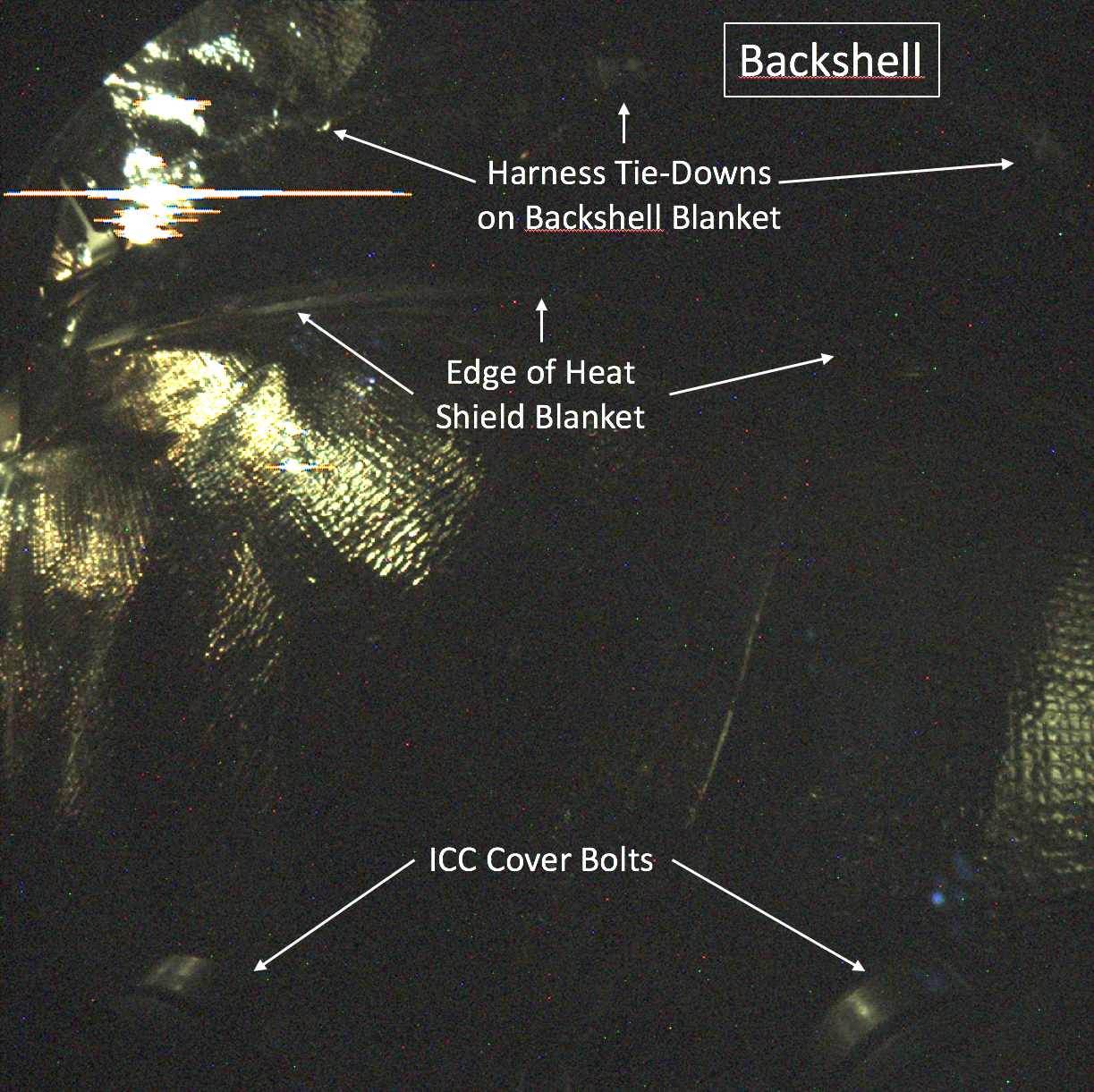
el polvo levantado por los motores de descenso se vuelva a asentar. Las
primeras imágenes se tomarán también en este primer sol, probablemente de la
cámara de contexto colocada bajo la plataforma, enseñando por primera vez el
área de aterrizaje, y de trabajo. Tras esto, el lander se apagará para dormir y
permitir que los paneles solares recarguen la batería. En Tierra, los ingenieros
habrán recibido los primeros indicadores de telemetría que indican el estado
del vehículo antes de ir a dormir. Para el Sol 1, comienza lo importante.
La primera semana de
InSight en Elysium la pasará entre
chequeos de salud y puesta a punto de los distintos sistemas. También en estos
días se empezarán a tomar los primeros datos, preliminares, con los sensores
auxiliares, para comprobar la meteorología, la temperatura, y demás. Como
comunicamos en su momento, la orientación será muy importante: el área de
trabajo estará en el lado sur del lander, para evitar en todo momento sobras
provocadas por el propio vehículo. Los paneles solares se extenderán en las
direcciones este y oeste, las mismas de las dos antenas de media ganancia tipo
cuerno del sistema RISE. La
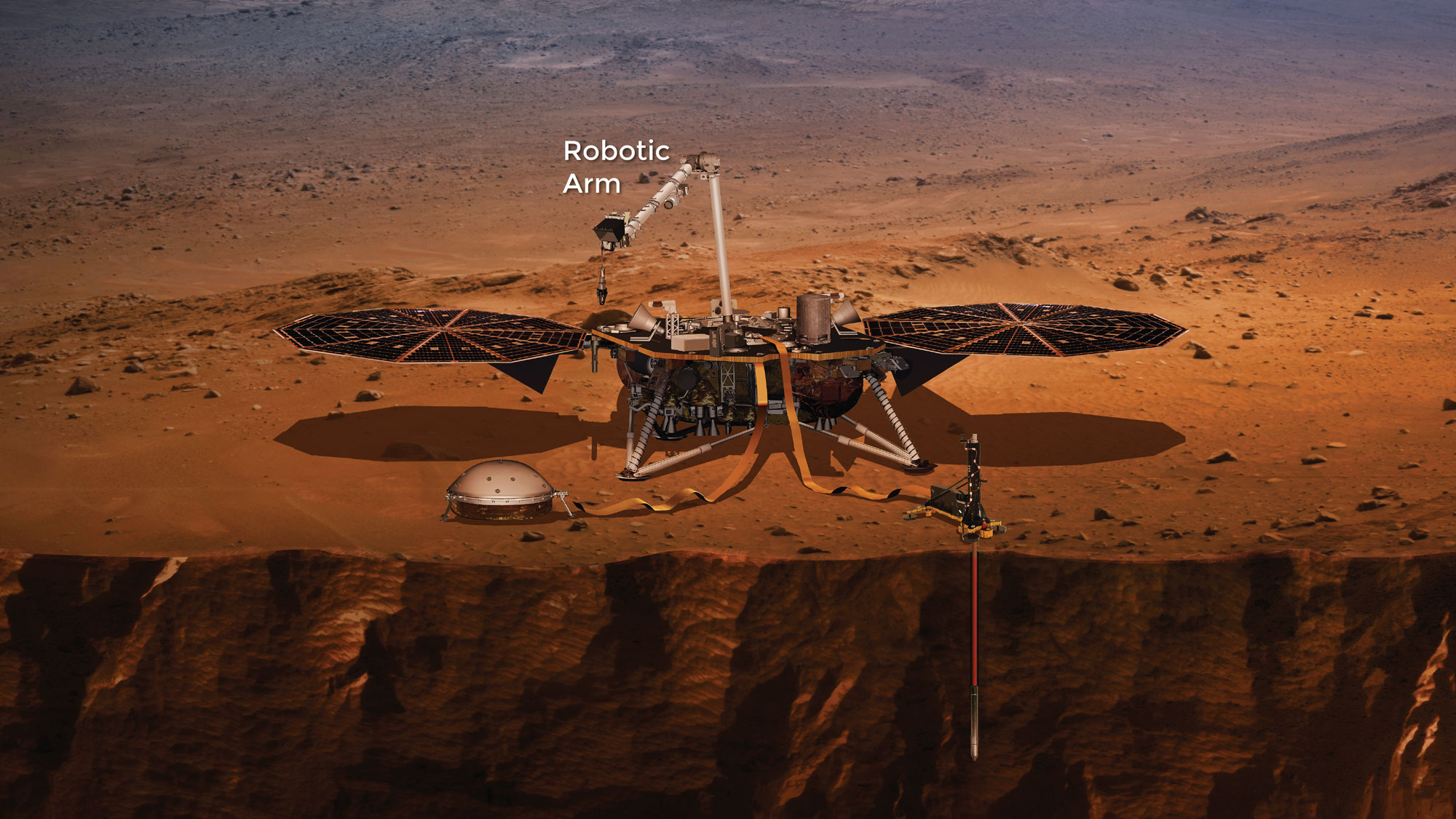
clave de las actividades posteriores es la
comprobación del brazo robot. Con casi dos metros de largo, posee juntas de
hombro, codo y muñeca, movidos por cuatro motores, proporcionándole una
libertad de movimientos de cuatro grados. Como este será el principal método de
ubicar los instrumentos en el suelo, saber que funciona correctamente es vital.
También porque porta la otra cámara. Con el brazo extendido, será posible tomar
imágenes de la zona de trabajo, con las que acabar componiendo una representación
tridimensional de ella, que será duplicada en la caja de arena del JPL, en la
que se ha instalado una
réplica casi exacta. Es posible que se tarden unas dos
semanas en escoger las zonas en las que colocar los instrumentos SEIS y HP
3,
y al tener una pala, el brazo robot podrá trabajar en la zona para prepararla
en anticipación al despliegue de los instrumentos. En caso de haber rocas,
podrá quitarlas de en medio, y también aplanar la zona moviendo la tierra. Su
pala, como la de
Phoenix, es capaz de
acumular hasta 500 gramos de material en su interior. Con el terreno preparado,
tocará el traslado.
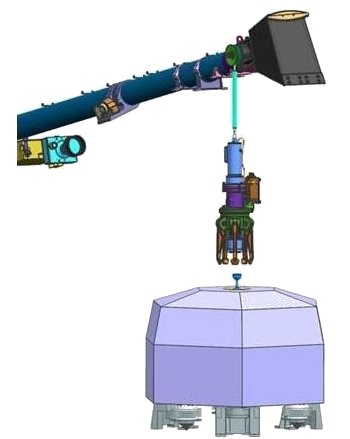
El proceso de colocar la
instrumentación en el suelo marciano, algo nunca antes intentado en otro
planeta, será lento por necesidad. En el brazo robot hay una agarradera de
cinco puntas, y sobre cada elemento a descender una especie de bola en la que
la agarradera debe asentarse. Como durante el lanzamiento, crucero y proceso de
aterrizaje, los elementos a situar en la superficie han estado fijados a la plataforma,
hay que liberarlos. Después, la agarradera será situada en posición, y fijada
al extremo del instrumento. Ya firmemente sujeto, el brazo levantará,
lentamente, el hardware, y lentamente también, se desplazará hacia la zona
escogida en la que colocarlo, y una vez en vertical sobre el lugar elegido, lo
bajará hasta que entre en contacto con la superficie. La liberación, por
seguridad máxima, se realizará únicamente por comando

enviado directamente
desde tierra, evitando con ello cualquier liberación accidental que pudiera
suponer un riesgo. En caso de no estar firmemente asentados, o estar en una
zona demasiado inclinada (más de 15º es inaceptable), podrán ser trasladados a
otra zona mejor. Todo el proceso será registrado usando la cámara del brazo, y
los momentos finales, también por la cámara de contexto. El primero de los
aparatos a depositar en el suelo marciano será el sismómetro
SEIS, y el proceso
durará varios soles, permitiendo al equipo en tierra verificar todo el
procedimiento. Hay una restricción, y es que no se puede volver atrás, los
cables de conexión de energía y datos entre el lander y los instrumentos no
pueden volver a retraerse. Cuando SEIS ya repose en el suelo, lo primero que
actuará será en sistema de nivelado, para posicionar el aparato de la manera
óptima para detectar todo movimiento sísmico de la manera óptima. Los primeros
soles de SEIS en el suelo se usarán para validar el sistema y comprobar que
todo está en su sitio, antes de instalar su Escudo de Viento y Termal, que será
depositado sobre él también de manera cuidadosa usando el brazo robot. Cuando
esta estructura en forma de domo esté sobre SEIS, los faldones que le cubrirán,
realizados también con mantas multicapa, se extenderán hasta llegar al suelo,
protegiendo al aparato de toda influencia externa. Entonces, llegará el momento
para HP
3. Tras ser depositado en el suelo (siguiendo el mismo
procedimiento lento y cuidadoso) tocará enterrarse. Su punta perforante, el
Mole, tiene en su interior un mecanismo de autoamartillado, que le permite
enterrarse

lentamente, avanzando pocos milímetros con cada golpe. El mecanismo
utiliza un motor, enganchado a una caja de cambios, que comprime lentamente un
resorte, que se libera rápidamente, generando el golpe que permite su
enterramiento, y así una y otra vez. Junto con esto, cuenta con sensores de
inclinación, sensores de temperatura y calentadores. El proceso de
enterramiento durará varias semanas, siguiendo un proceso de toda una serie de
golpes (lo suficiente como para descender 15 centímetros), para parar un par de
días para que se disipe el calor y hacer pequeñas mediciones, para después
continuar. El Mole irá tirando de un cable que tiene acoplados 14 sensores de
temperatura, pero no están colocados a distancias regulares, de hecho, cuanto
más lejos del Mole, más separados están. Tiene cable suficiente como para
alcanzar los 5 metros de profundidad, aunque la mínima será de 3. En caso de
que el suelo sea demasiado duro, se quedará a la mínima, si no, podrá
continuar. En cuanto a RISE, el sistema de radio ciencia podrá actuar el
primero, con sus emisiones directas comenzando tan pronto como el último día de
la primera semana de estancia marciana.
Cuando acabe el proceso de
colocación de los instrumentos, y su puesta a punto, que puede alargarse hasta
los 60 soles, comenzará la fase verdaderamente científica de la misión. Si los
dos primeros meses han estado dominados por una gran actividad, con comandos
cada día para ir situando todo en su sitio, la fase verdaderamente científica
es, como hemos dicho, de sentarse, y esperar. Como SEIS y HP
3 son
instrumentos que funcionan de forma autónoma, los comandos para la sonda serán
los mínimos imprescindibles, una carga por semana, como mucho. La tarea
primaria, de un año marciano, y 40 soles adicionales, de duración, estará llena
de actividades mínimas, contactando con la sonda para comprobar que todo anda
bien, y para descargar los datos acumulados. Pero hay que recordar que SEIS, HP
3
y RISE no son los únicos instrumentos que hay a bordo. También está la APSS, es
decir, sus sensores meteorológicos, su sensor de presión, su magnetómetro y su
radiómetro, sin olvidarnos de las cámaras. Las
cámaras serán usadas
intensamente durante la fase inicial de la misión, pero cuando todo este
proceso haya acabado, podrán ser usadas para otras cosas. El primer uso, más
allá del de escoger lugares en los que situar los instrumentos, será el de la
caracterización de la zona de aterrizaje. El lugar escogido en Elysium Planitia
será plano por necesidad, con una alta inercia termal delatando gran cantidad
de talco marciano y con pocas rocas, además de estar alejado lo máximo posible
de zonas de alto relieve. El paisaje, por lo tanto, será más o menos como el
encontrado en los cráteres Gusev y Gale, aunque en la zona central existen abundantes
cráteres de pequeño tamaño que podrían resaltar en las imágenes. Sobre todo la
cámara del brazo, llamada IDC (la Cámara de Despliegue de Instrumentos), al ser
elevada por el brazo robot, permitirá obtener imágenes para componer una visión
global a su alrededor. Esto permitirá conocer la geografía de la zona,
importante para estudiar el cómo de la formación de esta localización en
concreto. En menor medida, las dos cámaras podrán estudiar también la geología
de la zona. Las dos cámaras son dispositivos a color, con filtros Bayer que
permiten juntar la información de las longitudes de onda azul, verde y roja
para tener una secuencia tal y como la veríamos con nuestros propios ojos. Aunque
carecen de otros filtros que puedan discriminar distintos tipos de minerales,
aún podrán hacer una identificación limitada de la composición de la
superficie, simplemente viendo la variación de color del material a su
alrededor. El resto de sistemas tiene un doble propósito. Por un lado, generan
resultados sobre las condiciones ambientales, útil para el estudio general de
Marte, pero también están montados para auxiliar a los datos que recojan SEIS y
HP
3. La meteorología del lugar la monitorizarán los sensores TWINS y
el sensor de presión. Ya hemos dicho que TWINS está formado por hardware de
repuesto del desarrollado para el sistema REMS de
Curiosity, por lo que proporcionarán no solo información de
temperatura, también de la velocidad y la dirección del viento. Ambos sensores
se sitúan sobre pequeños pedestales, por lo que son, olvidándonos del brazo,
los elementos a mayor altitud sobre el suelo, más de un metro por encima,
dándoles un campo de visión claro. Por su parte, el sensor de presión permitirá
estudiar su variación con el paso de los días, las semanas, las estaciones, y
los años. No varía demasiado con respecto a los que ya llegaron al planeta,
pero el de
InSight es un sensor de
alta resolución, hasta 10 veces más que todo lo enviado. Ya se sabe que la
presión atmosférica en Marte puede llegar a variar hasta un 25% del verano al
invierno, pero este aparato permitirá ver, con mayor precisión, la variación de
presión a lo largo de los días y las horas. Los estudios meteorológicos también
se beneficiarán del uso de las cámaras. La cámara de contexto ICC, al apuntar
directa y continuamente al área de trabajo, estará idealmente situada para, con
el tiempo, ver el movimiento de la arena y cómo se va depositando sobre los dos
instrumentos. E caso de existir dunas, las imágenes de la IDC de un mismo punto
en las proximidades del lander con días o semanas de margen puede mostrar el
movimiento de estas dunas. La IDC también puede ser movida de tal modo que mire
hacia el cielo, para poder ver, en caso de aparecer las nubes en movimiento
sobre él, así como la observación de la opacidad atmosférica, es decir, la
cantidad de polvo en suspensión. En misiones anteriores, una de las formas era
usar un filtro especial que permite a las cámaras mirar directamente al Sol. Creemos
que
InSight carece de él, pero hay
otros modos, como mirar hacia el horizonte. Esta medición de opacidad es interesante
porque el planeta acaba de salir de un evento de polvo global, el más intenso
desde el 2001. Pero ya lo hemos dicho, estos sensores tienen un segundo
propósito. SEIS es un aparato sumamente sensible, siendo capaz de detectar
movimientos sísmicos más pequeños que el diámetro de un átomo. Para ello, no
solo sus sensores están dentro de un contenedor de vacío, también pueden estar
afectados por lo que ocurra a su alrededor. Esa es la razón del escudo que se
colocará sobre él, pero el viento también proporcionará una señal indeseada que
deberá ser conocida para poder ser retirada cuando los datos se empiecen a
procesar. Por ello, conocer la velocidad y la dirección del tiempo, así como la
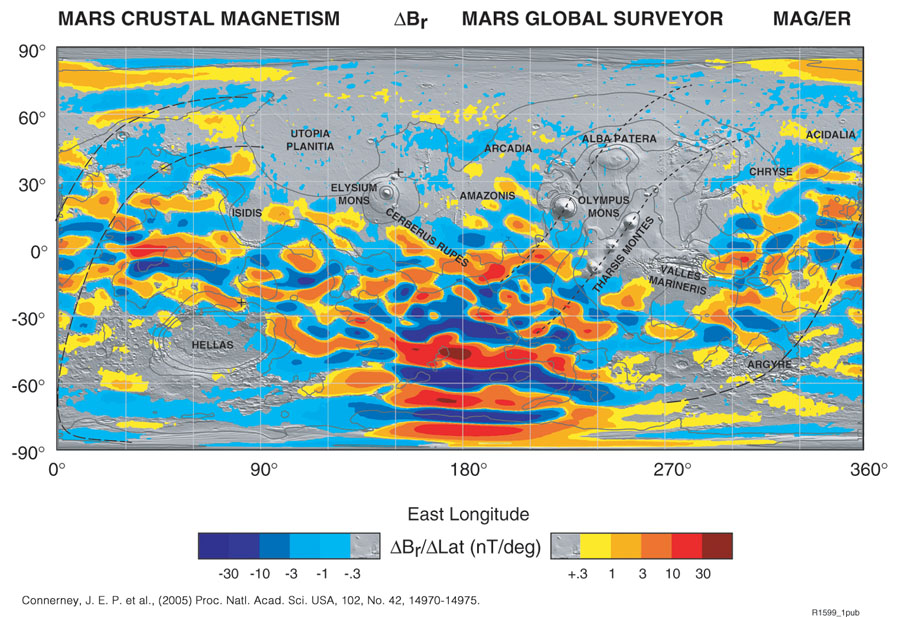
variación de temperatura y presión diurna, ayudará a limpiar los datos. Otra fuente
de interferencia sobre SEIS es el de la señal magnética. Elysium es una de las
zonas más magnéticas del planeta, descubierto por
Mars Global Surveyor, y esta señal puede interferir en los muy
sensibles sensores del sismómetro. Para ello, con la intención de conocer la
intensidad y la dirección de las señales magnéticas, incorpora el IFG, un
magnetómetro clásico de núcleo saturado triaxial, el primero enviado a la
superficie marciana. Poder caracterizar el entorno magnético alrededor de la
sonda ayudará también a eliminar esta señal indeseada de los datos de SEIS
durante el procesado. Este sensor, muy sensible, supone también una oportunidad
para la ciencia, ya que su posición en superficie permitirá obtener datos sobre
la variación diaria y temporal de los campos magnéticos fósiles que pueblan
esta región marciana. En cuanto al radiómetro, se asocia con HP
3, y
es en esencia una prolongación del aparato que obtendrá información de la
temperatura de la superficie, datos que complementarán los que se recojan bajo
el suelo. El radiómetro está situado en el lado norte, por lo que podrá ver no
solo cómo varía la temperatura entre el día y la noche, también como influye la
sombra de la plataforma en la forma de absorber o liberar el calor solar por
parte del suelo. El radiómetro

tiene dos lados, con tres sensores idénticos,
registrando las mismas longitudes de onda en el infrarrojo termal. Junto con la
misión de apoyo a su aparato, este radiómetro tiene objetivos propios para ver
cómo esta superficie, seguramente arenosa, retiene calor durante el día y lo expulsa
durante la noche, información sin duda que permitirá conocer también, en cierta
medida, el tipo de material que lo conforma. No lo hemos visto en ningún lado,
pero como el brazo robot posee una pala, también podría existir la posibilidad
de que se hagan experimentos de mecánica del suelo. Con la pala situada en el
suelo, y empezando a arrastrarla, se puede conocer el estado del suelo: si el
polvo está agregado o suelto, más blando o más duro, al tiempo que podría permitir
escavar tal y como lo hizo
Phoenix,
para ver las capas del suelo, comprobando si se encuentran estratificadas o no,
y ver qué hay debajo del nivel del suelo. Como toda misión, existe la
posibilidad de extensión de misión una vez terminada la tarea primaria, y en
este caso resultaría beneficioso para sus instrumentos principales, ya que con
estas investigaciones, cuanta más información, más precisión.
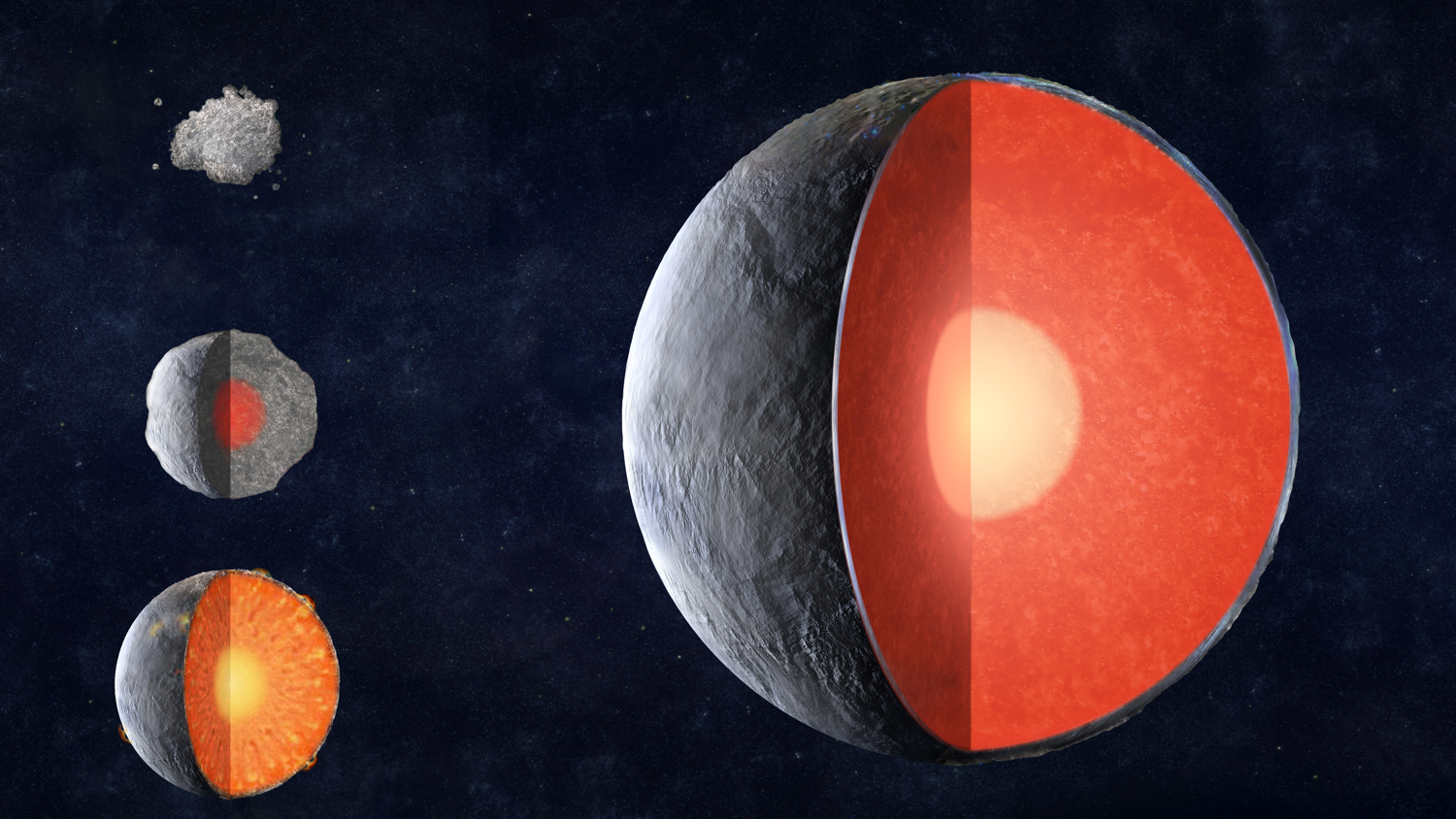
La tarea de los aparatos primarios
permitirá conocer distintas cosas. SEIS, como todo sismómetro, estudiará el
interior del planeta partiendo de las ondas sísmicas y cómo se propagan, para
descubrir las distintas capas que existen bajo el suelo, que permiten o evitan
su extensión. El método principal será la detección de terremotos marcianos,
eventos sísmicos internos, aunque se cree que no sean demasiado intensos, con
temblores que pueden llegar, como mucho, a 6 grados en escala terrestre. También
tendrá otro método, externo, para estudiar el interior. Como han demostrado los
orbitadores, Marte todavía es bombardeado por meteoritos, y cuando éstos
impactan, también generan ondas sísmicas, que SEIS podrá captar y registrar. Lo
ideal sería tener un segundo sismómetro, situado en el otro extremo de Marte,
pero las limitaciones de presupuesto solo han permitido uno. HP
3
será como una suerte de termómetro que permitirá saber cuánto calor queda en el
interior del planeta, y cómo
este calor se escapa. La razón principal del
estado actual de Marte es precisamente la pérdida del calor interno. Cuando el
campo magnético se apagó, la dinamo planetaria desapareció, y el núcleo se
empezó a enfriar. Saber cuánto calor despide actualmente Marte permitirá saber
cuánto ha perdido hasta la fecha. Y finalmente RISE ayudará a establecer la estructura
interna del planeta. Ya se sabe cómo es, más o menos, por dentro, gracias a
Mars Pathfinder, pero los datos de RISE,
a lo largo de un año marciano (o más si continua) añadirán precisión al
conjunto de datos. Como se recordará, el núcleo terrestre comprende el 54% del
diámetro total de la Tierra, en Marte, está entre un 40% y un 60%. RISE ayudará
a reducir ese margen de forma notable. Pero para conseguir estos datos, habrá
que esperar.





{kind=link}
{kind=link}
{kind=link}
{kind=link}