Puesto que queda poco para que
llegue a Marte, es hora de hablar algo más de Perseverance. Ya lo hicimos con Curiosity
en su momento, y ahora es el turno del nuevo.
Una misión a Marte de superficie
sin cámaras es como un jardín sin flores. Las cámaras son necesarias, no solo
para ver y estudiar el entorno en el que el vehículo ha caído, también para
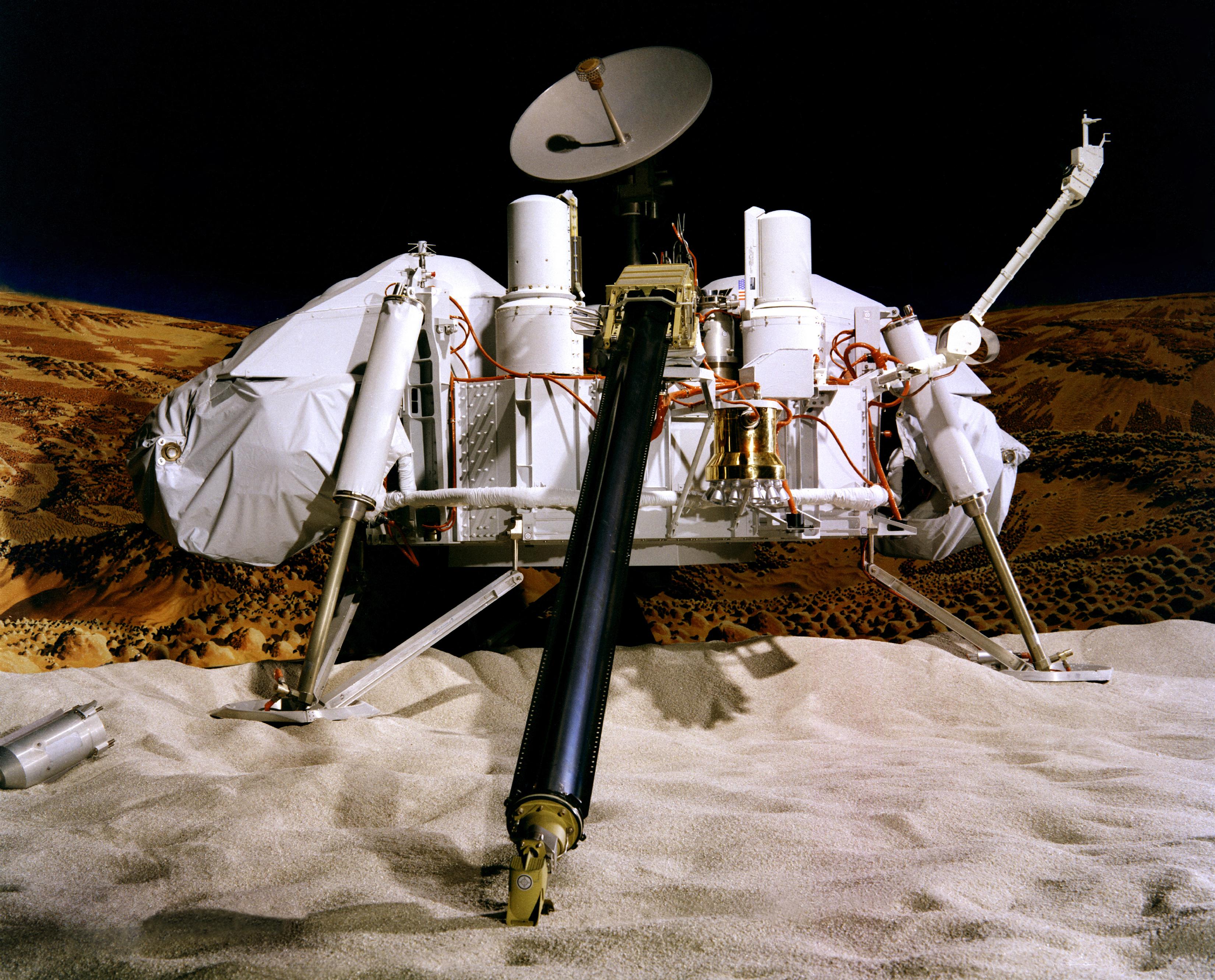
comprobar lo que hace, y asegurarse de que no hay peligro en ello. Los dos VikingLander, los primeros en trabajar con éxito sobre el Planeta Rojo,
contaban cada uno con dos cámaras facsímil, aparatos ingeniosos que, sin
embargo, no eran aptos para la misión de los vehículos: buscar vida. Así, cada
cámara, rotando sobre sí misma, era capaz de escanear, de una vez, todo un
panorama, en blanco y negro, color e infrarrojo, y para ver zonas complicadas
del lander, contaba con espejos situados estratégicamente. Fueron un éxito, sí,
pero cuando se consiguió regresar, 21 años después, a la superficie, la
tecnología había cambiado, con el advenimiento de los sensores digitales CCD. En
julio de 1997, desembarcó Mars Pathfinder,
que, en todo el sistema de vuelo, contaba con tres sistemas de cámaras. El
lander
en sí sólo contaba con uno, un sistema de visión estéreo cuyos dos canales de
visión, sus ojos derecho e izquierdo, servían a un único sensor CCD. Las otras,
estaban en el verdadero elemento estrella de la misión Discovery: el rover
Sojourner, que contaba con dos
microcámaras delanteras en blanco y negro, para ver por dónde iba, y una
microcámara trasera, a color (la primera en llegar a la superficie marciana),
para observaciones de las rocas. La siguiente en ir a Marte, pero que no lo
consiguió, fue
Mars Polar Lander, que
equipaba con tres. La principal era en esencia una repetición, mejorada de la
de
Mars Pathfinder, para panoramas
del área de aterrizaje. Las otras dos eran novedades. En su brazo robot había
una cámara para estudiar el suelo, que además de contar con un mecanismo de
enfoque (el primero en ir a Marte), disponía de un sistema de luces mediante
bombillas, emitiendo luz roja, verde y azul. La tercera era novedad absoluta,
la cámara de descenso, cuya misión era precisamente esa: obtener imágenes del
descenso del vehículo, en blanco y negro, eso sí. Como consecuencia del fiasco
de 1999, como se recordará, el programa marciano de la NASA se reformuló, y en
el 2004 llegar allí los Rover de Exploración Marciana, los ya míticos
Spirit y
Opportunity. La misión de los MER supuso la verdadera explosión de
las cámaras de superficie, porque cada uno usó diez, si bien es cierto que cada
rover empleó 9 en sus misiones de superficie. Aquí empezamos a hacer la
distinción entre cámaras. Por un lado
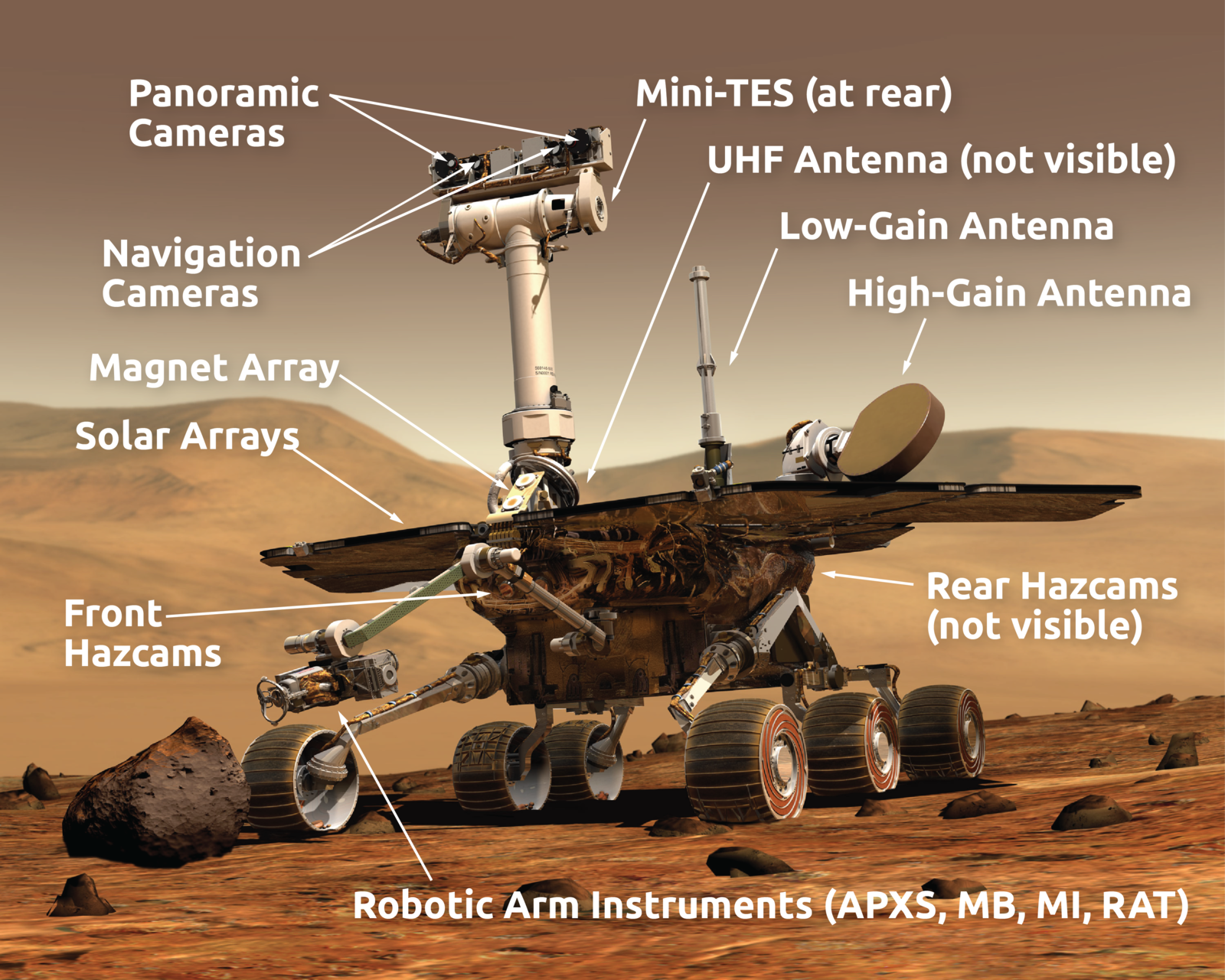
estaban las consideradas cámaras
científicas, tres en cada vehículo (las dos cámaras panorámicas y la cámara
microscópica), y por el otro, las cámaras de ingeniería, seis por cada rover,
dos cámaras de navegación o NavCam, y cuatro cámaras de detección de peligros,
o HazCam, dos delanteras y dos traseras. A estas hay que añadir la décima de la
misión, el sistema denominado DIMES, cuya misión era obtener imágenes durante
el descenso, y a partir de ellas, estimar la velocidad lateral del conjunto de
descenso. Éstas fueron las primeras cámaras en obtener instantáneas durante el
amartizaje, que proporcionaron información de contexto sobre los lugares de
aterrizaje de cada rover, y facilitó posteriormente su localización desde la
órbita mediante imágenes. Todas estas cámaras contaban con la novedad de sus
detectores CCD. Antes, tanto Mars
Pathfinder como Mars Polar Lander,
usaban sensores que cubrían apenas 512 x 512 pixels, de las cuales, la mitad
superior era el área de imágenes, y el
inferior servía como almacenamiento temporal antes de transferir la imagen
registrada a la memoria, y en el caso de las cámaras estereoscópicas, el área
activa se dividía en dos secciones de 256 x 256 pixels para cada ojo,
proporcionando así imágenes diminutas. Con los MER, se decidió usar detectores
de mayor formato, unos CCD de 1024 z 2048 pixels, en los cuales la parte
superior era la de imagen, y la inferior de almacenaje temporal, y todas las
cámaras montaron uno. En especial, las cámaras de ingeniería de los MER son las
que han sentado cátedra en Marte, capturando miles y miles de imágenes de la
superficie mostrando todo tipo de estructuras y paisajes, algunos sin parangón.
En mayo del 2008, desembarcó Phoenix, que era,

en esencia, una
repetición de Mars Polar Lander, pero
con instrumento más, y así, una cámara más. Contaba con versiones mejoradas de
las que transportó el lander perdido. En especial, la cámara estéreo perdió el
único sensor y, en cada ojo recibió un sensor CCD idéntico al que se estrenaron
en los MER. Para la cámara del brazo robot, la novedad fue sustituir las
bombillas de filamento por luces de LED, también rojo, verde y azul. No hubo
cambios en la cámara de descenso, y la cuarta cámara añadida era un sistema
microscópico, diminuto, como si se tratase de un microscopio óptico de
laboratorio. Y llegamos a agosto del 2012, y a Curiosity y sus 17 cámaras, divididas en cinco científicas (las dos
MastCam, la RMI de ChemCam, MAHLI y MARDI) y doce de ingeniería (cuatro de
navegación y ocho de prevención de peligros). Como ya comentamos en su día, las
científicas, salvo RMI, cuentan con sensores CCD con filtro Bayer, por lo que,
como las cámaras comerciales, pueden capturar instantáneas a color. El resto
son de blanco
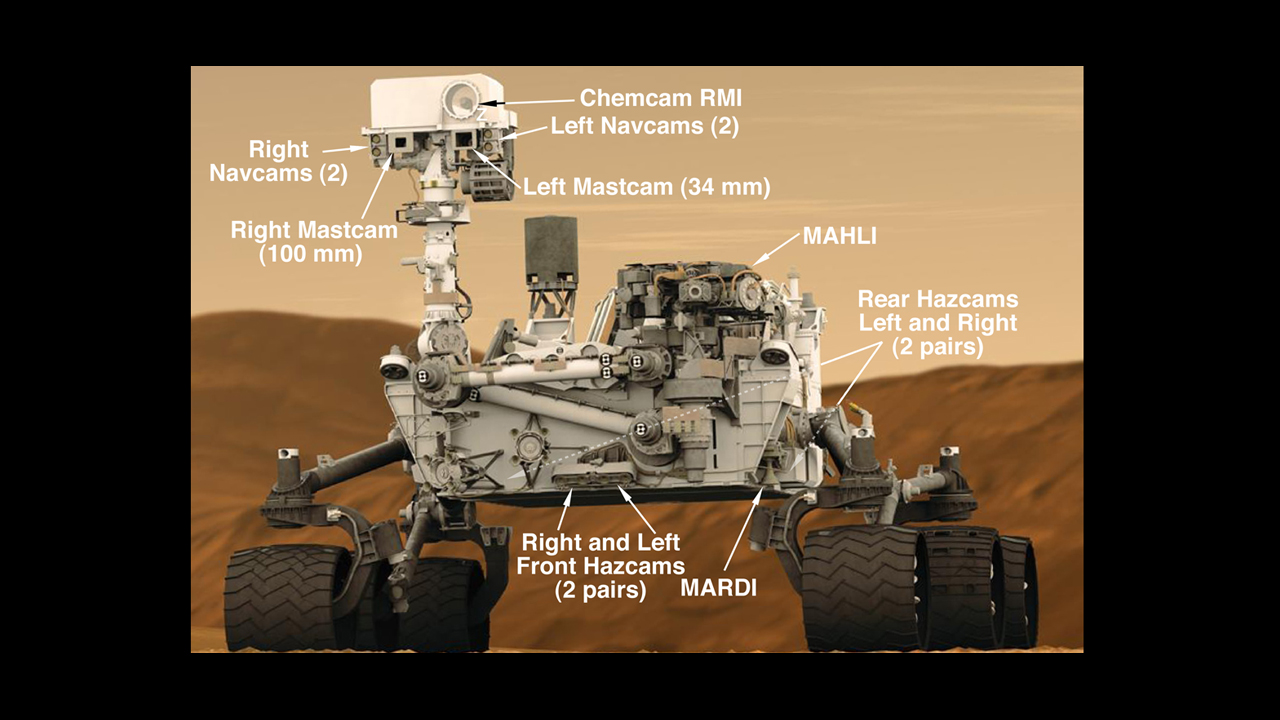
y negro, y tanto las NavCam como las HazCam son repeticiones de
las usadas en los MER, por lo que es justo decir que son los sistemas que más
tiempo llevan tomando imágenes de la superficie marciana, un total de 17 años
enseñándonos paisajes increíbles. Pero se provoca la pregunta: ¿por qué el
doble que los MER? Por redundancia. A diferencia de los pequeños rover, Curiosity cuenta con dos ordenadores,
por lo que se decidió duplicar el número de cámaras, para que cada par (de
navegación, y de prevención de peligros) se conectaran a cada uno. Así, en caso
de cambiar de ordenador, se pasa de una cadena de cámaras a la otra. Todo por
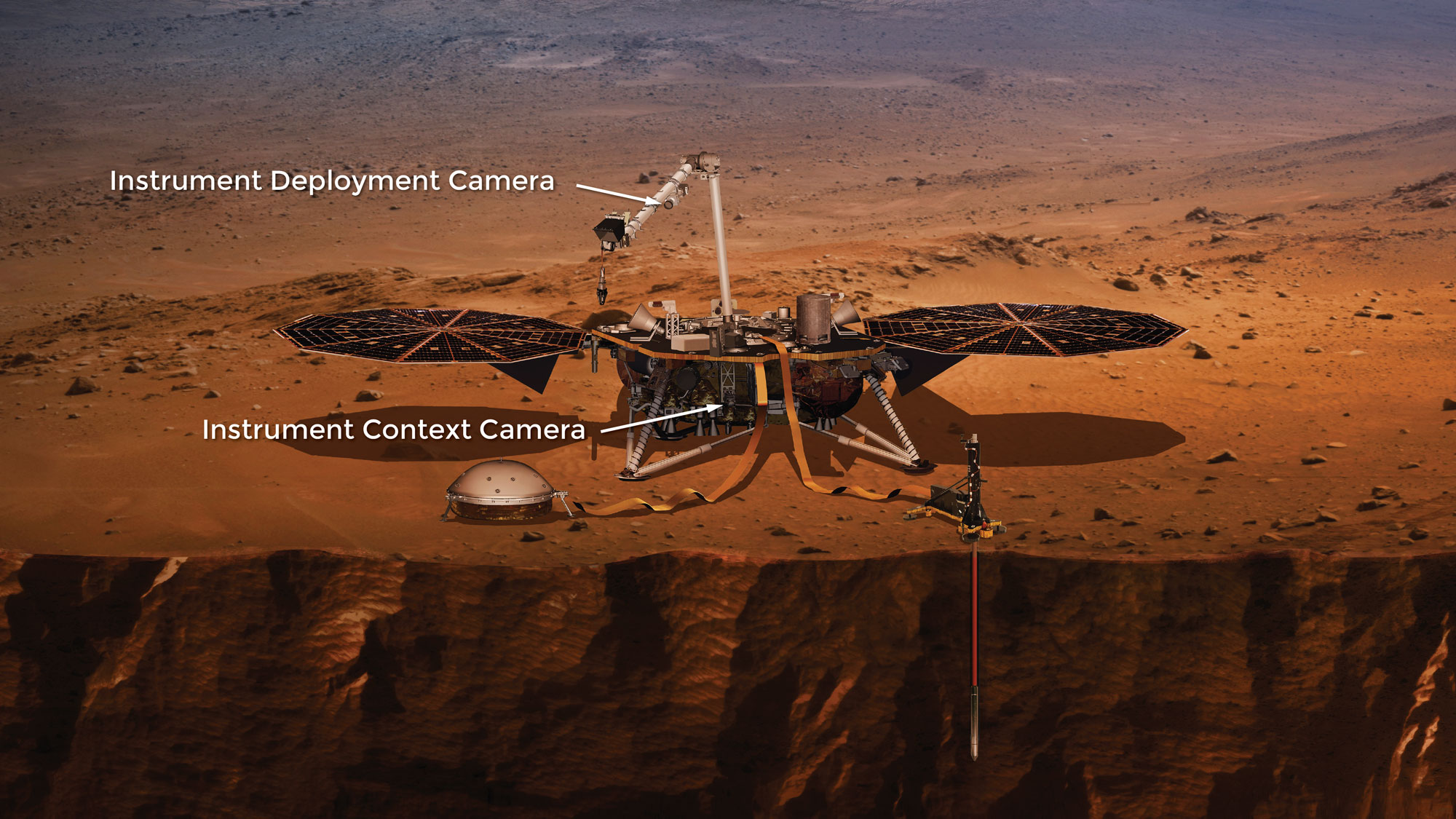
si acaso. Y en noviembre del 2018, desembarcó InSight que, en comparación con Curiosity,
resulta magra en cámaras, con solo dos, una en su brazo robot, y otra bajo la
plataforma, mirando el área de trabajo del brazo. Para ahorrarse tiempo y
desarrollo, se optó por continuar con los sistemas de los MER, por lo que la
cámara del brazo es una NavCam, y la situada bajo la plataforma una HazCam. Pero
cuentan con novedad, porque, originalmente, se pensaba que tuvieran sensores simples
para blanco y negro, pero tras ver Marte a todo color con Curiosity, tanto la ciencia como los entusiastas empujaron al
proyecto a añadirles capacidad a color, volando con ellas, y enseñándonos su
lugar de residencia en vivos colores rojizos. Es cierto, nos hemos dejado en el
camino otras dos que por diversas circunstancias tampoco llegaron, como Beagle 2, que portaba dos cámaras, y Schiaparelli, con solo una de descenso. Así
veis, como el número de cámaras está gobernado por las necesidades de la
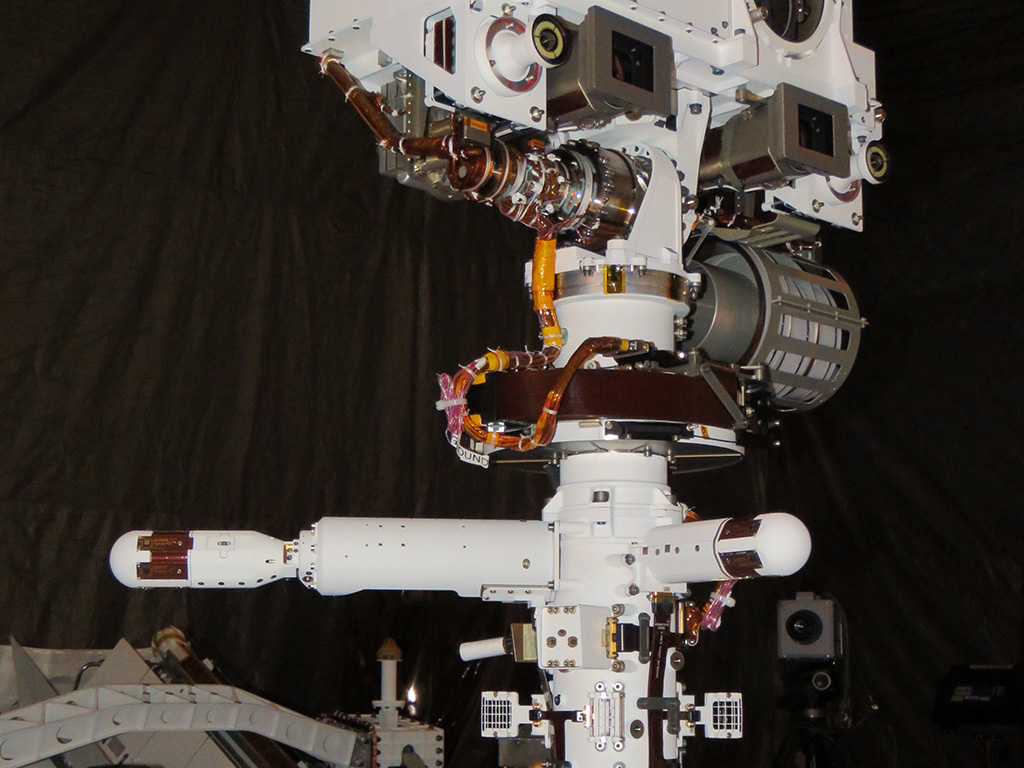
misión. Y ahora llega Perseverance.
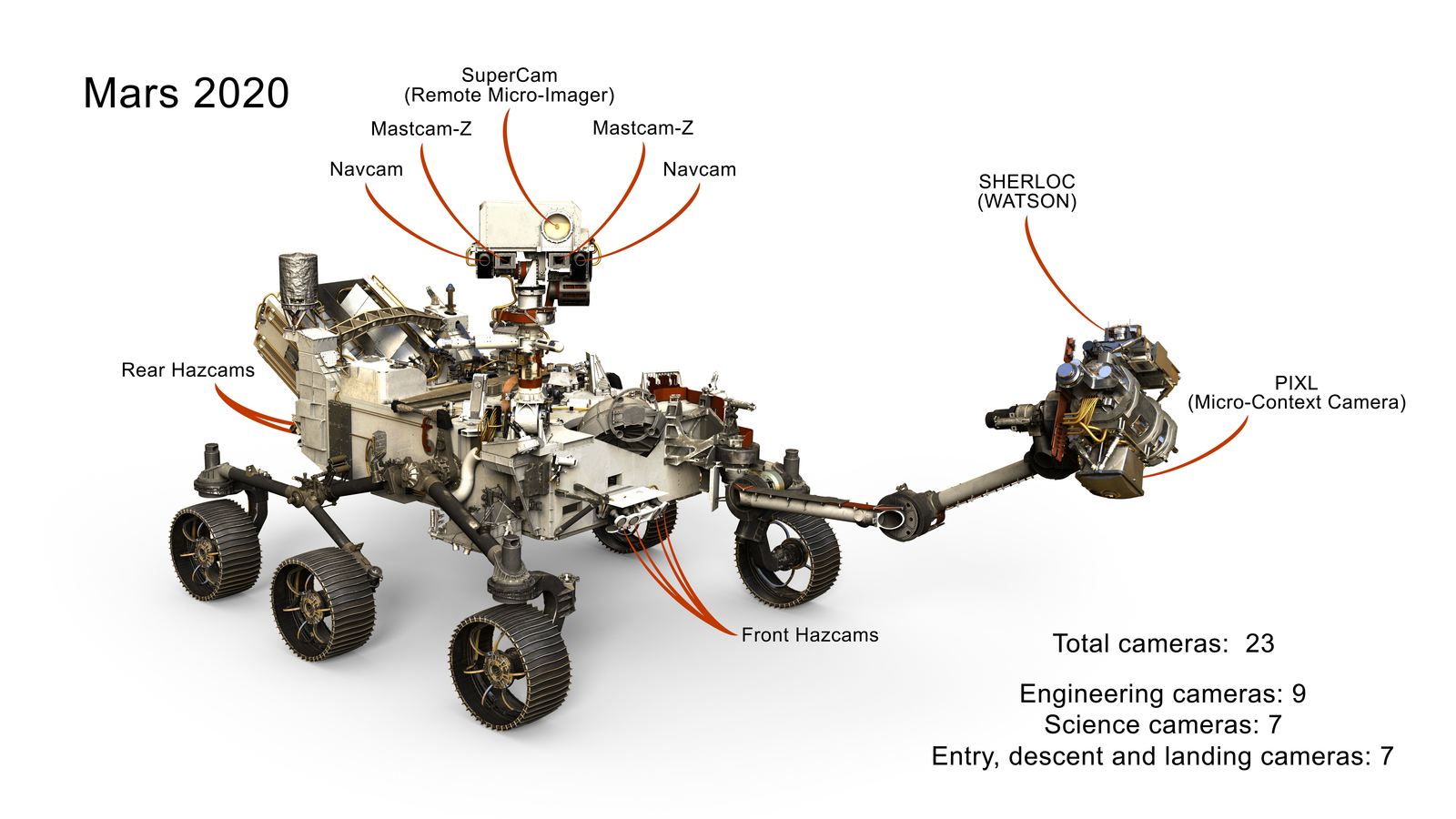
El nuevo rover de la NASA vuela
con cantidad record de cámaras, 23 en total. (si contabilizáramos al pequeño
helicóptero de prueba, ya serian 25) Éstas se categorizan así: siete
científicas, y el resto de ingeniería. Sin embargo, de todas estas, el rover
equipa 21, pero una vez en superficie, sólo empleará 19. Arrancamos, así, por
las científicas. A todas ellas, decir que derivan de viejas conocidas.
El sistema principal de visión
son las dos
MastCam-Z. Aunque en un principio pensamos que eran las que no
volaron con
Curiosity, en realidad se
trata de una versión simplificada, que se basan en las MastCam de
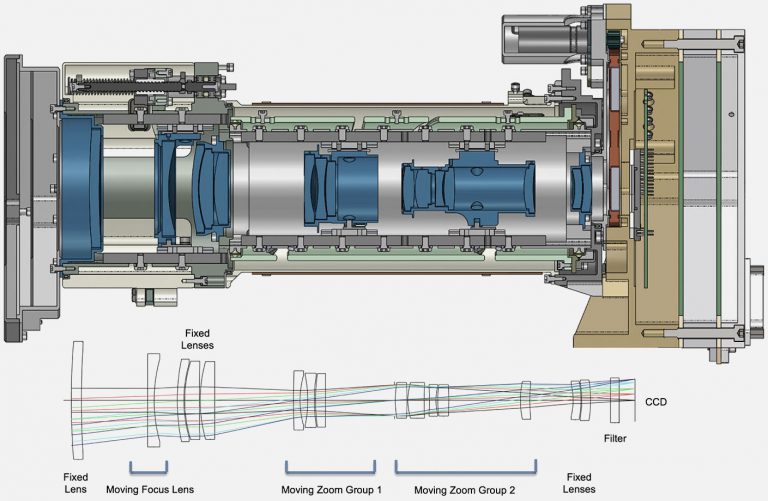
Curiosity. Son sistemas refractivos compuestos
por nada menos que quince lentes, con seis fijas (cinco en dos grupos) y el
resto móviles, con un elemento de enfoque móvil seguido por los dos grupos de
zoom. Se han diseñado para que su longitud focal varíe de 26 mm. para imágenes
de campo ancho (
f/7.0) a 111 mm. (
f/9.7) para imágenes de detalle. Así, el
sistema puede obtener imágenes claras desde de 1 a 2 metros hasta el
infinito.
Por lo demás, el sistema es
como las MastCam, con el bafle frontal (idéntico en ambas
cámaras) rueda de
filtros y equipo de electrónicas, incluyendo el CCD de 1600 x 1200 con filtro
bayer incorporado para imágenes a color. En cuanto a los filtros y su rueda,
también es de 8 posiciones, solo que con huecos cuadrados en vez de redondeados
para aprovechar al máximo el sensor, algo imposible con Curiosity. En los propios filtros apenas hay variaciones, con algún
cambio a nivel de filtro y longitud de onda, incluyendo el filtro solar de la
cámara izquierda, modificado para observar el Sol en concierto del filtro a
color. El cerebro de las cámaras es el denominado DEA, o ensamblaje de
electrónicas digital, que adquiere y procesa las imágenes capturadas por ellas,
cada una de dos megapixels, almacenándolas en una memoria RAM de 128 MB para
almacenaje temporal y 8 GB para almacenamiento definitivo, un conjunto de
memoria por cámara. Servirá para todo: estudios geológicos mediante sus filtros
multiespectrales, observación del rover para comprobar su estado, documentación
de la entrega de los tubos de muestras, etc. Siguiendo con la herencia de Curiosity, pasamos

al instrumento
SHERLOC, que cuenta con dos cámaras de contexto. La primera es WATSON, y es, básicamente,
una repetición de MAHLI, en que posee el mismo grupo óptico refractor de diez
elementos, tres de los cuales móviles, sistema de LED’s blancos y de luz
ultravioleta (365 nm), tapa con ventana transparente, y sensor CCD de 1600 x
1200 pixels con filtro bayer. Así, el sistema será capaz de ver objetivos a
distancias mínimas (llegando a 1.78 cm. de cada objetivo) con una longitud
focal efectiva de 18.4 mm., observando hasta los granos individuales de la
arena, hasta el infinito, para permitir observaciones lejanas del terreno,
fotografiar el rover para ver cómo anda, autorretratos del vehículo, etc. Su control
es mediante una DEA idéntica a la de MastCam-Z, con idénticas capacidades y la
misma capacidad de memoria. La otra, ACI, comparte con MAHLI y WATSON el grupo
óptico capaz de enfoque, pero varia en que la tapa carece de ventana
transparente, y el sensor, idéntico al de WATSON, carece de filtro bayer. Esta cámara
está coalineada con el láser ultravioleta, para ayudar al apuntamiento del
instrumento sobre el objetivo a estudiar. Aquí vamos sin orden, porque pasamos
a SuperCam. Sobre las cámaras científicas y de navegación en lo alto del
mástil, a dos metros del suelo, está la parte expuesta del instrumento, que
contiene, entre otras cosas, el láser de la parte LIBS y el telescopio. Éste

es
idéntico al de ChemCam, con una apertura de 110 mm. y arquitectura reflectiva. Conserva
la capacidad de enfoque de su primo, pero varía en el tipo de sensor, perdiendo
el CCD en blanco y negro de 1024 x 1024 por uno tipo CMOS de 2048 x 2048
pixels, y encima con filtro Bayer para imágenes a color. Sus tareas son las
mismas: ayudar a apuntar el láser, observar remotamente los objetivos a
estudiar, y como con Curiosity, según
se ha experimentado durante la misión, observar zonas remotas. El telescopio
sirve para, además de las imágenes, reflejar la luz del láser cuando agrede a
las rocas, y la novedad, entregar la luz que recoge a un espectrómetro visible
e infrarrojo, situado junto a la cámara, basado en un filtro sintonizable
acusto-óptico que sirve a un CCD, una arquitectura similar a la del instrumento
NOMAD de ExoMars TGO. Otro aparato científico
con cámara es PIXL, y como la ACI de SHERLOC, su propósito es
ayudar a apuntar
el instrumento sobre el objetivo a analizar. Este sistema, la Micro-Cámara de
Contexto, es un sensor CCD en blanco y negro, con limitadas capacidades a color
en virtud de sistemas de LED’s. La cámara y los LED’s son elementos cruciales
para apuntar PIXL óptimamente, porque cuenta con un sistema de seis patas
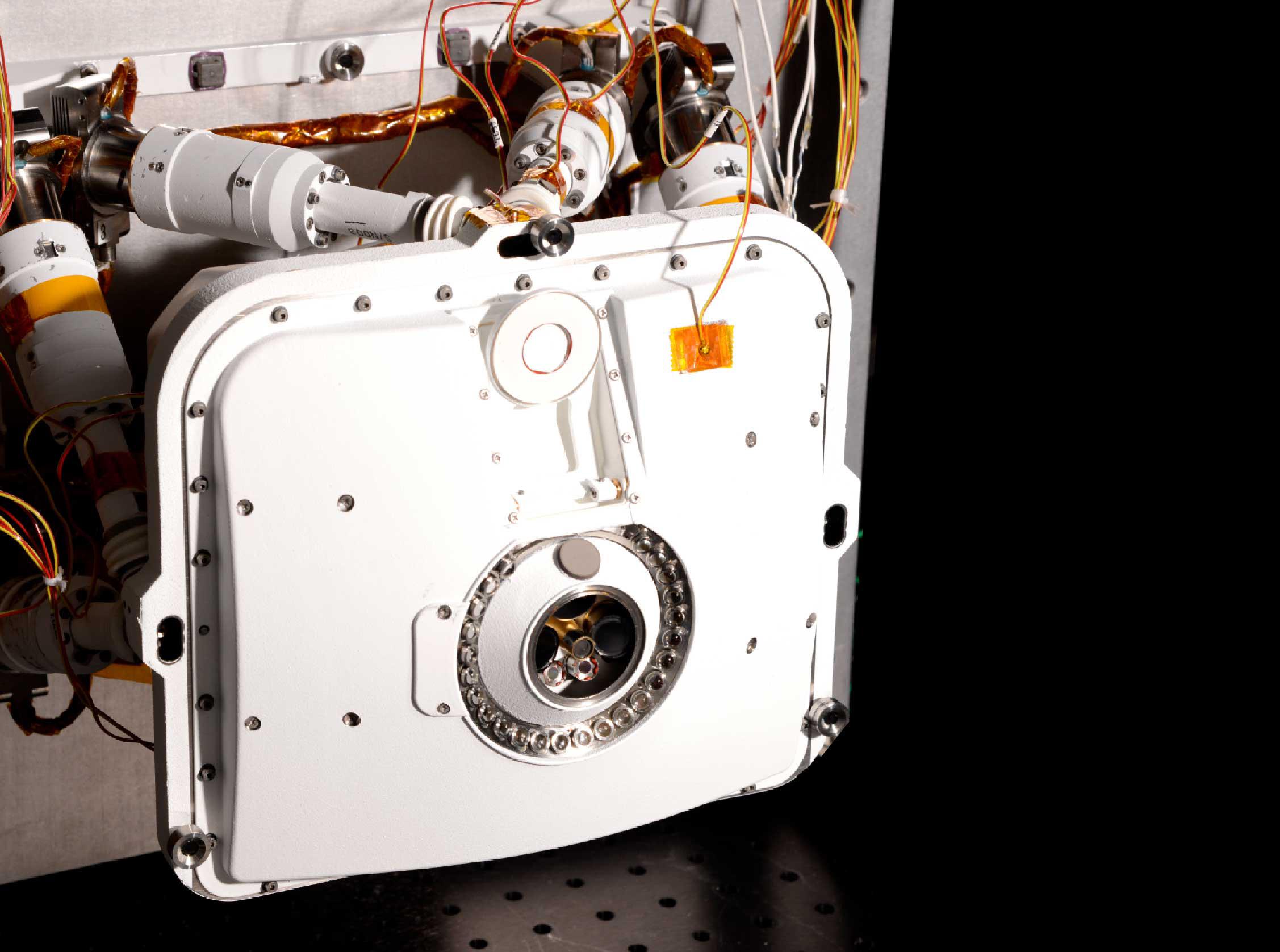
móviles para apuntarlo óptimamente a la roca o el suelo de interés. Y finalmente,
llegamos a la SkyCam. Forma parte del paquete meteorológico MEDA, y se acopla
directamente al sensor de radiación y polvo. Este sistema de imágenes es el
último ejemplar de las cámaras de ingeniería estrenadas en los MER. Es una
HazCam, modificada para su nueva labor, retirando recubrimientos internos,
añadiendo uno solar en el exterior con forma anular, y dispuesto
para observar
el cielo. Por ello, sus características son conocidas, con una lente de ojo de
pez, y una longitud focal de 5.6 mm. (f/15)
sirviendo a un CCD de 1024 x 1024 pixels, sin filtro bayer. Su centro de atención
será la atmósfera y el polvo en suspensión. Al observar continuamente al cielo,
seguirá la formación y evolución de las nubes, vigilará la opacidad atmosférica
para entender la cantidad de polvo en suspensión, y llegada la noche, incluso
para observaciones astronómicas. Esta cámara funcionará, ya sea mediante el
ordenador principal, ya sea por el ordenador que controla MEDA, liberando así
recursos de computación. Muchos parecidos con respecto a Curiosity, como vemos, pero también sus diferencias.
Ahora nos toca hablar de las de
ingeniería. Y las dividimos en dos categorías: las puras de ingeniería, es
decir, las HazCam, NavCam, y la nueva CacheCam, y las de EDL, que usará durante
el proceso de entrada, descenso y aterrizaje. Vayamos a las primeras. Como los
MER y Curiosity, cuenta con cámaras
de navegación y de prevención de peligros, pero a diferencia de su primo
hermano, cuenta con cuatro menos. Las
NavCam sólo son dos, un ojo derecho y
otro izquierdo, más exteriores que las MastCam-Z, separadas por 42 cm. Si bien
el sistema óptico se basa en las anteriores NavCam, recibe mejoras: cuenta con
un sistema óptico de seis elementos refractivos con una longitud focal efectiva
de 19.1 mm. (f/12) y un filtro de
bloqueo tanto infrarrojo y ultravioleta. Estas características aumentan su
campo de visión, porque los sistemas antiguos, que cubrían un campo de visión
de 45 x 45º, se considera demasiado estrecho para cubrir terrenos tanto
cercanos como lejanos. Por ello, las nuevas cuentan con un campo de visión de
90º (horizontal) x 70º (vertical). Esto permite dos cosas: cubrir más terreno,
tanto cercano como lejano, y usar menos imágenes a la hora de capturar
panoramas. Cada cámara entrega la luz a un nuevo tipo de sensor, pasando de
tecnología CCD a la CMOS, mucho más tolerante a la radiación. No solo se cambia
el tipo de sensor, también el tamaño, aumentando de 1024 x 1024 pixels a 5120 x
3840 pixels, y pasando de imágenes en blanco y negro a imágenes a todo color
gracias a sus filtros bayer. Así, se podrá no sólo obtener mejores imágenes
para ayudar a navegar al rover, también permitirá una temprana identificación
de los objetivos de interés. Las nuevas HazCam también traen mejoras. Siguen siendo
cámaras con lente de ojo de pez, un
sistema óptico refractivo de 10 elementos y
una longitud focal de 14 mm. (f/12),
sirviendo al mismo tipo de sensores CMOS. También cuenta con los mismos filtros
de bloqueo que las NavCam. Aquí también se ha aumentado el tamaño del campo de
visión, pasando de 124º en los MER y Curiosity
a 136º (horizontal) x 102º (vertical), con la intención de ver mucho mejor la
zona de trabajo frontal, y las ruedas en su totalidad. Las HazCam son seis:
cuatro frontales y dos traseras. Las delanteras están dispuestas de forma
idéntica a las de Curiosity, es
decir, un par conectada a un ordenador, y el otro al segundo, por ello, su par
estéreo es de sólo 25 cm. Atrás sólo hay dos, cada una a
un extremo del MMRTG,
y así separadas por 93.4 cm. De este modo, tanto las NavCam como las HazCam
traseras están conectadas a cada ordenador. La última cámara, la CacheCam,
tiene una misión muy concreta: comprobar la correcta recogida de la muestra en
cada tubo de muestras. Usa el mismo sensor CMOS de las NavCam y HazCam, pero
cuenta con un sistema refractivo de seis lentes con una abertura de 50 mm. Al
estar montado internamente, necesita un sistema de iluminación, contando con
luces LED de luz blanca. Si bien la cámara se monta en horizontal, el tubo
óptico que posee la abertura cuenta con un espejo que inclina la luz 45º para
mirar hacia abajo, y de ahí a un bafle, en el que se integra el tubo rellenado
para así ver el resultado de la recogida de muestras. Naturalmente, esta será
la menos usada de la misión, para verificaciones y las comprobaciones de los
tubos. Éstas son, sin duda, una mejora.
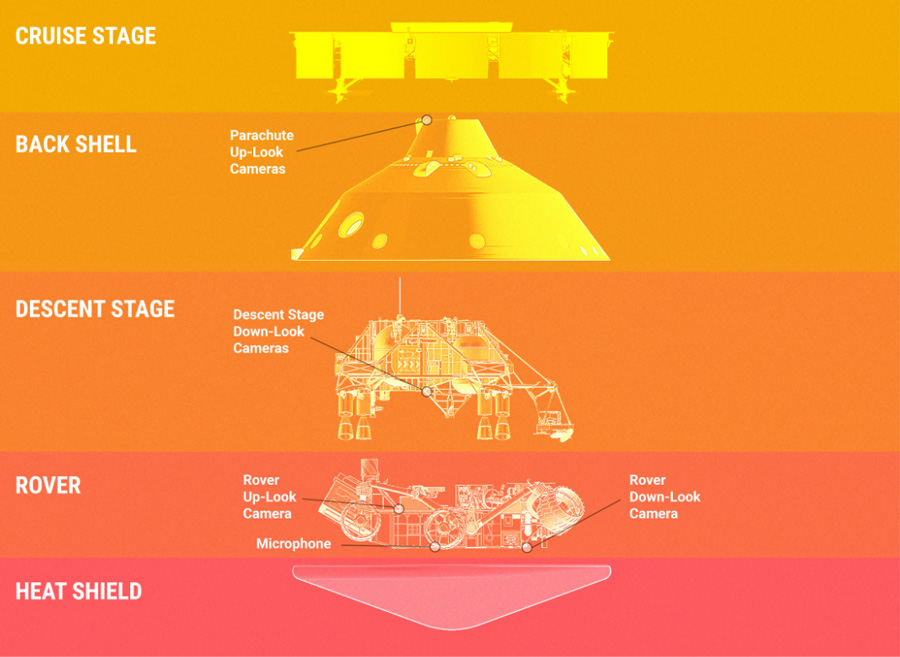
Ahora pasamos a las cámaras de EDL.
Son, en total, siete, si contamos la Cámara del Sistema de Visión del Lander o
LCAM, una parte crucial del sistema TRN. Tres observarán el despliegue del
paracaídas como las Cámaras de visión hacia arriba del Paracaídas o PUC’s. En
la etapa de descenso, es decir, la mochila cohete, hay otra llamada DDC, cámara
de visión hacia debajo de la etapa de descenso, mientras que el rover cuenta
con el resto: la cámara RUC o de visión hacia arriba, y la RDC, de visión hacia
abajo. Estas seis son prácticamente idénticas: sistemas refractivos de seis
elementos y longitud focal de 9.5 mm. (f/2.8)
sirviendo a CCD de filtro bayer de 1280 x 1024 pixels (la DDC cuenta con un
séptimo, con una longitud focal de 8 mm. y f/5.6,
entregando la luz a un sensor, también CCD de filtro bayer con una superficie
activa de 2048 x 1536), y
su propósito es único: observar los distintos eventos
del proceso de descenso y aterrizaje. Para montar este sistema se han inspirado
a la secuencia del descenso grabada por la MARDI de Curiosity y las más de mil imágenes empleadas para ver todo el
descenso desde la expulsión del escudo de reentrada hasta el contacto de superficie.
Éstas, sin embargo, irán más allá, porque veremos, como queda claro, el
despliegue del paracaídas (las PUC rodean el cono del contenedor), la
separación de la etapa de descenso de la aerovaina, así como la maniobra Sky
Crane, en la que la mochila cohete hace descender al rover hasta el contacto de
la superficie, terminando con el alejamiento de la mochila cohete cuando se han
cortado los cables que han descendido el rover a la superficie. Las cámaras PUC
adquirirán imágenes a dos cadencias: 75 y 30 fps, la DDC a 12 fps durante unos
75 segundos, la RUC a 30 fps durante 140 segundos, y la RDC a 30 fps durante
260 segundos. Así, serán miles de imágenes capturadas en los pocos minutos
desde antes de la apertura del paracaídas hasta que Perseverance reposa en la superficie. Para manejar tal volumen de
datos, cuenta con ordenadores propios llamados DSU’s, Unidades de Almacenaje de
Datos, que congrega el ordenador que lo controla todo y la memora masiva del
sistema. El procesador es un Intel Atom, y el sistema funciona con un sistema
operativo Linux. En realidad son dos DSU´s, una en el rover, la principal, y la
segunda en la etapa de descenso, conectándose a través de interfaces USB3 y
USB2, SATA, y Ethernet Gigabit. Eso significa que las imágenes de las cámaras
en la aerovaina y en la etapa de descenso se recogen en la DSU situada en este
componente, y son transferidas a la del rover, que cuenta con un almacenamiento
masivo de 480 GB. La última cámara, LCAM, tiene un único propósito, y nada más
que uno: obtener imágenes a una altísima cadencia para ayudar a reducir el
tamaño de la elipse de aterrizaje. El sistema TRN es un ordenador dedicado con
un mapa pregrabado (basado en imágenes del sistema CTX de MRO) que comparará con las imágenes que LCAM adquiera, y así ayudar
a encontrar un lugar de aterrizaje seguro. TRN es, en esencia, un sistema de
piloto automático. La cámara es un sistema refractivo de nueve elementos,
longitud focal de 5.8 mm. (f/2.7) y
un sensor CMOS monocromático de 2592 x 2048 pixels, para un campo de visión de
90 x 90º. La cámara se conecta con el ordenador del TRN, denominado VCE, o
Elemento de Computación de Visión, un ordenador gestionado por un procesador
RAD750. La cámara deriva de la MARDI, y se ha diseñado para obtener imágenes
con una alta cadencia, buscando obtener imágenes muy nítidas para ser
procesadas inmediatamente por el VCE y así dirigir la etapa de descenso hacia
el lugar más seguro encontrado. Es todo
muy complejo. Teniendo en cuenta que LCAM es un sistema crucial, ¿por qué el
resto? La primera razón es para que el público alucine al ver, por primera vez,
eventos que sólo antes nos imaginábamos. La segunda, es de ingeniería, para ver
la respuesta del sistema de vuelo en las condiciones reales de operación, y
ayudar a diseñar mejoras en los sistemas para futuras misiones. Sin duda, lo
que se busca es atraer la atención del público. Puesto que el presupuesto sale
de los impuestos, qué mejor forma de ver que se gastan bien que en esto. Como ya
sabéis, no es la primera vez que hay cámaras para atraer a la gente a la
misión.
Aquí acabaríamos, pero no. Porque,
como anunciamos en el título, Perseverance
tiene oídos. Son dos, y uno es parte de este paquete de cámaras de EDL. ¿Qué
se busca? Escuchar los sonidos del descenso, a saber: despliegue del
paracaídas, expulsión del escudo de reentrada, separación entre la aerovaina y
la etapa de descenso, los motores en funcionamiento, el momento de tocar
tierra, y si es posible, el impacto de la etapa de descenso con el suelo. Este
micrófono está en el exterior del rover, envuelto por una carcasa construida a
propósito, y una rejilla de campo diseñada para el entorno marciano. El micrófono
se conecta a la DSU del rover mediante una conexión USB2. Se buscó un sistema
lo más simple posible, por lo que es muy posible que, en momentos, pueda saturarse
por diversos sonidos, como el del viento azotando durante el descenso. Durante el
proceso, el micrófono tomará datos desde antes del despliegue del paracaídas
hasta más allá del aterrizaje.






{kind=link}