Por lo general, cuando algo
triunfa, se suelen exigir repeticiones. El éxito de Sojourner en Marte en 1997 fue empuje suficiente para que, en el
2003, se mandaran allí los MER, que
no tardaron en triunfar en sus misiones, hecho que motivó a la NASA a crear MSL, con Curiosity cosechando éxito tras éxito, una misión que, casi ocho
años después de llegar al planeta rojo, sigue rodando por allí. Por ello, al
poco de llegar brillantemente, la más alta autoridad del país motivó a la NASA
para enviar, no antes del 2020, un nuevo rover que fuera más allá. Ya en el
2020, el nuevo vehículo está a las puertas del lanzamiento.
Antes de ponerse manos a la
obra, primero había que decidir qué debía hacer en nuevo rover. Como se
recordará, Sojourner era un ensayo
tecnológico que proporcionó también datos sobre la geología de la zona de
aterrizaje. Por su parte, los gloriosos Spirit
y Opportunity se diseñaron para
ser verdaderos geólogos de campo, con la misión concreta de buscar señales que
indicaran la existencia de agua en la superficie marciana. Yendo un paso más
allá, la tarea de Curiosity era ya la
de ver si, en tiempos pretéritos, Marte tuvo las condiciones necesarias para
apoyar la vida, por minúscula que fuera. Como paso lógico, el proyecto Mars Rover 2020 se abrió para tratar de
buscar los restos fosilizados de esas probables formas de vida que hubieran
prosperado en el entorno primigenio marciano. Con este proyecto tan ambicioso
en mente, ya había con que trabajar.
Cuando uno compara a
Curiosity con
Perseverance, a simple vista pueden parecer gemelos, pero una
inspección exhaustiva muestra que en realidad son primos hermanos. Es cierto
que el ADN de
Curiosity está ahí, ya
que el diseño de la plataforma, esquema de suspensiones, mástil de instrumentos
y brazo robótico son repuestos o nuevas construcciones derivadas directas. Sus
medidas son prácticamente idénticas, con tres metros de largo (sin contar los
más de dos metros de longitud del brazo robótico), 2.7 de ancho y 2.2 metros de
altura con el mástil extendido, y una altura libre al suelo de unos 78 cm. Los
sistemas que gestionarán a
Perseverance
se almacenan dentro de la plataforma, y son repuestos dejados de
Curiosity. Así, cuenta con dos
ordenadores, cada uno centralizado en un procesador RAD750 de 256 MB de memoria
RAM dinámica, y modificados para intentar paliar los problemas informáticos que
han golpeado de vez en cuando al
MSL.
Además, cada uno cuenta con una memoria flash de 2 GB de capacidad. En el
apartado de comunicaciones, cuenta con comunicación directa
con Tierra mediante
banda-X (un transpondedor tipo SDST) conectado a una antena de alta ganancia
direccional en dos ejes y una de baja ganancia omnidireccional, así como un
sistema ELECTRA-Lite UHF para interconectarse con los orbitadores equipados con
relés en esta frecuencia, empleando una antena exclusiva. El sistema de
movilidad sigue siendo el mismo esquema Rocker-Bogie de seis ruedas, con ambos
lados conectados mediante un diferencial y cada rueda acoplada a un motor
eléctrico, siendo las ruedas de las esquinas las encargadas de hacer maniobrar
a
Perseverance en superficie. Uno de
los cambios más importantes son las propias ruedas. Son algo distintas que las
de
Curiosity, unos 52 cm. de altura y
algo más estrechas, y se han modificado en grosor para hacerlas más
resistentes
al desgaste, además de añadir nuevas bandas de rodadura, no solo en diseño,
también en cantidad (48 por los 24 de
Curiosity)
para evitar provocar demasiada presión en ellas mientras circula. Tampoco hay
cambios en la generación de energía, recurriendo al Generador Termoeléctrico de
Radioisótopos Multimisión o MMRTG, que carga 4.8 kg. de plutonio-238, generando
electricidad a partir de la desintegración natural radioactiva de la sustancia.
La energía no alimenta directamente al rover, sino que pasa a las dos baterías
de ión-litio para así poder funcionar en superficie. Los verdaderos cambios
empiezan en el extremo del brazo robótico. Como el de
Curiosity, el de
Perseverance
mide 2.1 metros y cuenta con cinco grados de libertad, pero lo importante es lo
que se encuentra situado en la torreta. Además de dos de los instrumentos,
cuenta con otras herramientas, y la básica es el taladro. Vale,
Curiosity también, pero el del nuevo
rover es distinto en
muchos aspectos. Como PADS, el de
Perseverance es también un sistema de perforación tipo percutor,
aunque es capaz de perforar únicamente por rotación. Las diferencias comienzan
en su función básica. Mientras PADS perforaba muestras de roca para
pulverizarlas y entregarlas a sus instrumentos analíticos, el de
Perseverance es capaz de tomar núcleos
completos. La punta del taladro será capaz de hacer agujeros de 27 mm. (por los
16 de
Curiosity) y extraer núcleos de
13 mm. de diámetro por 60 de largo. Otra gran diferencia está en las puntas del
taladro. PADS posee la capacidad de, si una punta se rompe o atasca (cosa que
no ha sucedido hasta la fecha), separarla y cambiarla. En
Perseverance, se ha añadido un carrusel de nueve puntas
intercambiables para distintos usos: dos sirven para tareas de abrasión, seis
para adquisición de núcleos, y una última para recogida de regolito. Una vez
usada cada punta, es devuelta al carrusel. La razón de este sistema tan
complejo es porque en el futuro se plantea traer a la Tierra muestras
marcianas. En los
círculos astronómicos la misión de retorno de muestras
marcianas lleva décadas en las cabezas pensantes que gestionan los programas, y
tras mucha discusión, se decidió que
Perseverance
contara con un sistema de adquisición, manejo y almacenamiento de muestras. El proceso
comienza seleccionando una zona prioritaria a perforar. El proceso continúa
seleccionando la punta más apropiada, insertando en ella uno de los 43 tubos de
muestras, para acoplarlo al taladro. Una vez recogida la muestra (núcleo o
regolito) el conjunto de punta y tubo vuelve al interior, las dos piezas se
separan y el tubo con la muestra entra dentro del vientre del rover hacia el
sistema de manejo de muestras. Este elemento es otro sistema tipo carrusel,
plagado de partes móviles que, además de esos 43 tubos, cuenta también con 5
tubos testigos diseñados para capturar en su interior todo tipo de
contaminantes, como gases emitidos por el rover, materia orgánica terrestre o
los elementos químicos provocados por el encendido de los motores, para
comprobar que al recoger las muestras, no quedan contaminadas con nada
terrestre. Estas muestras no quedarán encerradas dentro indefinidamente; por el
contrario, en momentos escogidos por la gente de la misión, estos tubos se irán
depositando en la superficie, con el objetivo de que, en el futuro cercano,
puedan ser recogidos por una nueva misión específica. Volviendo a la torreta,
posee dos herramientas básicas: una de ellas es un sensor de contacto con el
terreno, para detener el brazo en caso de tocar suelo, y la herramienta de
extracción de polvo que, a diferencia del cepillo de
Curiosity, utiliza gas. Pasando a las cámaras de ingeniería, cuenta
con nueve. Seis son las
HazCam, cámaras de prevención de riesgos, y dos las NavCam,
las cámaras de navegación. Con respecto a las de
Curiosity, supone una reducción de cuatro. Para
Perseverance, se ha hecho un rediseño de
estos dos grupos, con lentes más eficaces, tanto en resolución como en
cobertura, y sensores CMOS de 20 megapixels con filtros Bayer para capturar
imágenes en color. Las HazCam están situadas cuatro en la parte delantera de la
plataforma, y dos en la trasera, a cada lado del RTG (altura al suelo,
aproximadamente 0.7 metros), mientras que las NavCam se sitúan en el mástil de
escaneo remoto, en los extremos de la parte inferior, y desde su percha a casi
2 metros del suelo, pueden distinguir objetos del tamaño de una pelota de golf
a 25 metros de distancia. La novena es novedad, y es la CacheCam. Situada en la
parte superior de contenedor del carrusel de muestras, permite ver cada tubo,
para comprobar que conserva una muestra en su interior. A estas hay que sumar
otras dos: una que observará el descenso apuntando hacia abajo, captando imágenes monocromáticas sobre un sensor de 1024 x 1024 pixels, y otra que
observará hacia arriba, para registrar qué hace la etapa de descenso en medio
de todo el proceso. Por si faltara poco, también cuenta con un micrófono,
situado en un lateral de la plataforma, con el que se quiere grabar los sonidos
del descenso a la superficie, además de los movimientos y actividades con
Perseverance ya en superficie. Como en
los rovers anteriores, una unidad de medición inercial mantendrá los pies en el
suelo al vehículo y, aunque mecánicamente es capaz, como sus antecesores, subir
pendientes de 45º, estará limitado electrónicamente a 30º. Uno de los cambios
más notables está en el software, diseñado para hacer a
Perseverance más autónomo en sus operaciones, liberando tiempo al
equipo científico a la hora de planificar las actividades. Así, el nuevo
sistema de navegación, en cooperación con las HazCam, permitirá al rover cubrir
más terreno de lo que ahora es posible, al hacer cálculos en tiempo real de los
accidentes frente al vehículo. Además, cuenta con una herramienta de
planificación interna que le permitirá emplear los recursos de a bordo de una
manera autónoma y efectiva, recordando a uno de los experimentos tecnológicos realizados
en
Deep Space 1 hace ya muchos años. La
ciencia la proporcionarán seis aparatos, además de contar con un experimento
tecnológico, con la vista puesta a las futuras misiones tripuladas. Tres son
versiones mejoradas de las que lleva
Curiosity,
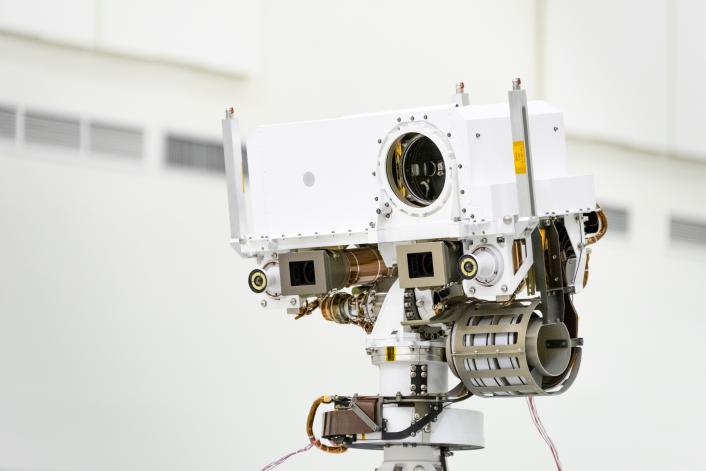
las otras tres son novedades. Los ojos principales de
Perseverance son las dos
MastCam-Z. Podrían ser réplicas de las de
Curiosity, pero son más avanzadas,
especialmente al disponer de algo muy importante: capacidad de zoom. Aunque estructuralmente
parecen idénticas, la capacidad de zoom añade una notable complejidad. Cada una
es un sistema refractor, contando con seis grupos de lentes, si bien los únicos
móviles son los números cuatro y cinco, contando con tres y cinco lentes cada
uno. Cuentan con un rango de zoom de 27 a 110 mm. (de
f/7 a
f/10), permitiendo
ver objetos de 3 cm. a 100 metros en el modo ancho y en el modo estrecho de
casi 7 mm. a la misma distancia. Los sensores son CCD de filtro Bayer de 1600 x
1200 pixels, y cuenta cada una con una rueda de filtros de ocho posiciones,
para observar tanto en luz visible como en el infrarrojo cercano, así como al
Sol con un filtro especial. El de la cámara izquierda, además, el filtro se ha
adaptado para ver al Sol usando el filtro Bayer del CCD. El interfaz digital,
similar al de
Curiosity, permite
almacenar hasta 8 GB de imágenes para cada cámara. Situadas a 2 metros del
suelo, cuentan con una separación de 24 cm. MastCam-Z permitirá obtener imágenes
y vídeo en alta resolución y definición no solo para propósitos de
planificación (que será útil cuando se forman imágenes 3D), también para
estudios geológicos para la búsqueda y la documentación de zonas interesantes a
explorar. Cuando se dejen los tubos de muestras en la superficie, las imágenes
serán de suma importancia para cuando se vayan a buscar, fijando puntos de
referencia válidos. Si ChemCam os pareció espectacular,
SuperCam os dejará
boquiabiertos. El
espectrómetro láser remoto de rotura es una herramienta
básica para
Curiosity, y SuperCam en
Perseverance irá más allá. Comparte ese aspecto
de cíclope gracias al telescopio de la Micro-Cámara Remota (ahora a color) y el
emisor láser situado en lo alto del mástil, mientras que para los estudios
geológicos añade nuevas capacidades, como una ampliación en la gama de visible
a infrarrojo, la inclusión de la espectrometría raman en luz visible, y el
añadido de un micrófono. Los dos componentes de SuperCam, es decir, los sistemas sobre el mástil y el conjunto de espectrómetros dentro del rover se acoplan mediante cables fibra óptica. Los únicos medios activos remotos de medición son la
espectrometría de rotura LIBS y el método raman, el resto son medios
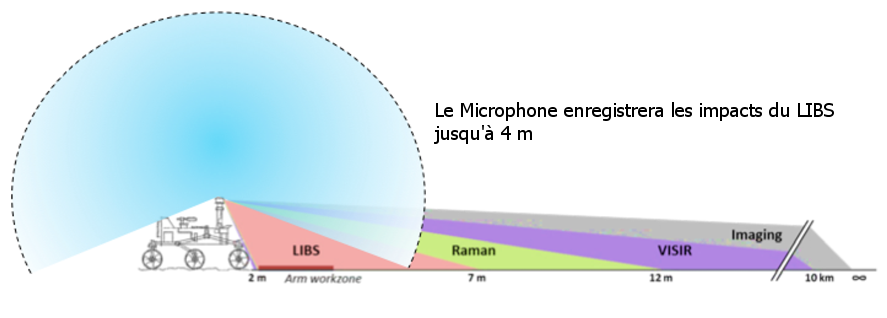
pasivos. Empleando
los láseres, SuperCam puede alcanzar distancias de hasta 7 metros. Tanto la
cámara como la espectroscopia en visible e infrarrojo son métodos pasivos. El método
raman, nuevo en Marte, irá a la búsqueda de elementos químicos concretos,
mientras que el resto se centra en la geología de la zona a estudiar. En cuanto
al añadido del micrófono, las pruebas en Tierra han demostrado que las
distintas rocas suenan distinto cuando un láser las agrede. Por ello, se podrá
hacer un estudio mejorado de qué rocas hay en Marte a partir del sonido que
emitan al ser alcanzadas por el láser. Eso sí, el micrófono, situado en una
pequeña prolongación en la parte delantera de la carcasa, no podrá oír nada a
más de 4 metros de distancia. MEDA, el Analizador de Dinámica Medioambiental de
Marte, es la estación meteorológica embarcada. Deriva de REMS, pero

con nuevos
elementos. A los sensores de viento y temperatura se añade un sensor de
presión, sensor de humedad relativa, sensor de radiación y polvo, con cámara
incorporada, y un sensor de infrarrojo termal. Los interesantes son TIRS y
SkyCam. El primero busca medir la temperatura del aire y del suelo con
precisión, y para ello el sistema está situado en el mástil, a 1.5 metros del
suelo. TIRS cuenta con capacidad para observar tanto hacia el suelo como hacia
el cielo, y tomar mediciones en cinco canales distintos, en longitudes de onda
que van de los 0.3 a los 30 micrones. En cuanto a la SkyCam, dentro del Sensor
de Radiación y Polvo, es una cámara con lente de ojo de pez (deriva de las
usadas en los
MER y
Curiosity) de longitud focal de 5.6 mm.
y un sensor CCD sin filtro Bayer. Dada su posición, solo se encargará de
estudiar la cantidad del polvo depositado, y de las propiedades de ese polvo. En
general, MEDA estudiará el entorno del rover para obtener temperatura, presión
atmosférica, velocidad y dirección del viento, nivel de humedad y de radiación
y la cantidad de polvo depositado sobre el vehículo. Los dos siguientes están
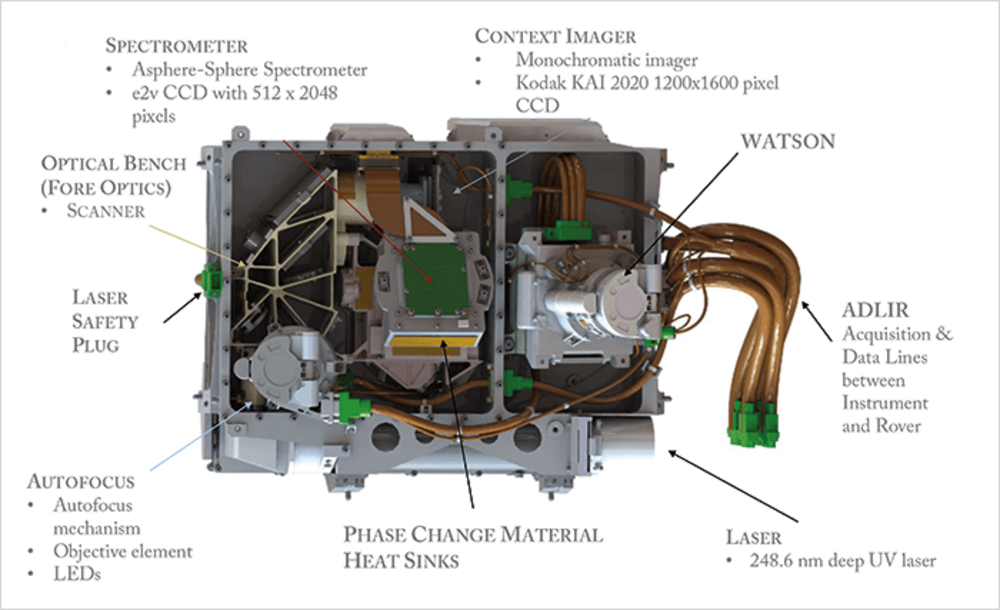
situados en la torreta del brazo robótico. SHERLOC, Escaneando Entornos Habitables
con Raman y Luminiscencia en busca de elementos Orgánicos y Químicos, combina
espectroscopia de fluorescencia y de resonancia raman, ambos en ultravioleta. Para
las dos tareas, cuenta con un láser emisor de luz ultravioleta emitiendo en la
región de los 248.6 nm, generando puntos de 100 micrones de diámetro. SHERLOC
apunta a localizar las bioseñales fosilizadas de los probables

microorganismos
encerrados en rocas o afloramientos, buscando los elementos químicos que son
marcadores de la vida, como el carbono, el hidrógeno, el nitrógeno, el oxígeno,
el fósforo o el azufre, entre otros. La espectroscopia de fluorescencia y raman
la hace un único sistema. El pulso láser rebota en la superficie, entrando en
el instrumento a través de una combinación de soporte óptico y escáner, de ahí
al espectrómetro, que emplea como detector un CCD de 512 x 2048 pixels. El láser
está coalineado con la llamada Cámara de Contexto y Autoenfoque o ACI, que
emplea una copia aproximada del sistema óptico de la cámara MAHLI de
Curiosity, incluyendo su capacidad de
enfoque, entregando la luz a un CCD de 1600 x 1200 pixels monocromático. Por si
fuera poco, SHERLOC cuenta con WATSON, el Sensor Topográfico de
Campo Ancho para
Operaciones e Ingeniería, que es, básicamente, una repetición de la propia
MAHLI, que no solo se usará para las operaciones de SHERLOC, también para
observar al rover para comprobar su estado general. Otro aspecto de SHERLOC que
llama la atención está en su objetivo de calibración, en el que han instalado
materiales utilizados en la fabricación de los trajes espaciales, cuyo objetivo
a largo plazo es ver cómo estos materiales se comportan en el entorno marciano,
ayudando así al diseño de equipos de EVA aptos para el entorno marciano. PIXL,
el Instrumento Planetario para Litoquímica en rayos X, es un sistema de
espectroscopia de fluorescencia de rayos X en miniatura. Busca estudiar la
composición química de las rocas de forma similar a la de los

instrumentos APXS
enviados a Marte en misiones anteriores, aunque con el enfoque a buscar las
idóneas para ser recolectadas para su posterior envío a la Tierra. Para ello
cuenta con una fuente emisora de rayos X, dos detectores de deriva de silicio y
un sistema de contexto óptico formado por una microcámara y diversas luces LED
como fuente de iluminación para iluminar el objetivo y poder hacer imágenes a
color y ultravioleta, en patrones de 3x5 y 7x7, permitiendo calcular la
distancia al objetivo. Además, cuenta con un mecanismo móvil de seis patas para
poder escanear de forma más completa la roca seleccionada partiendo de una
huella de entre 100 y 150 micrones de diámetro. Por último, está
RIMFAX, la
Cámara Radar para Experimentos de Subsuperfice Marciana. Es el primer radar
penetrador del suelo enviado al planeta rojo, con la intención de estudiar la
estructura del subsuelo de Marte. Las antenas quedan situadas en la parte
trasera inferior de la plataforma,
bajo el RTG, y trabajará en modo de onda continua
de frecuencia modulada. Trabajará en un rango de frecuencias que queda
intermedio a los radares orbitales MARSIS (
Mars
Express) y SHARAD (
MRO) con la
intención de proporcionar mejor resolución que ellos, así como tener mayor
poder de penetración del radar que portará el rover europeo
Rosalind Franklin, que volará como parte
de la segunda misión
ExoMars no antes
del 2022. Contará con la capacidad de penetrar hasta 500 metros, captando la
estratigrafía del subsuelo con resoluciones verticales de entre 5 a 20 cm.,
obviamente mejores de lo que se obtiene desde la órbita. La intención con este
aparato noruego es sondear bajo el suelo para entender así la evolución
marciana, tanto geológicamente como medioambientalmente, proporcionando además
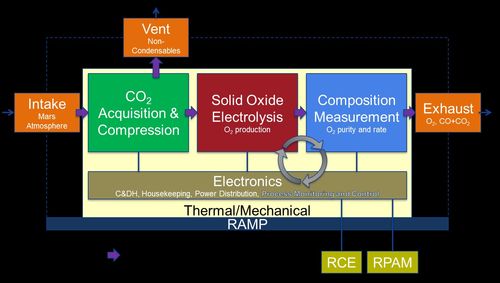
contexto al resto de la misión. Por último, está MOXIE, el Experimento de
Oxígeno Marciano mediante ISRU. Este sistema de prueba tecnológico es el primer
paso hacia el concepto denominado
Utilización de Recursos In-Situ. La intención
es ver si poseemos la tecnología necesaria para aprovechar los materiales
marcianos en beneficio de las misiones tripuladas. En el caso de MOXIE,
pretende crear oxígeno respirable a partir de los gases atmosféricos. Como todo
aparato de prueba tecnológica, es muy complejo, pero lo que se busca es que el
aparato absorba el CO
2 atmosférico, lo calienta, para después
dividir el dióxido de carbono de forma electroquímica en CO por un lado, y
oxígeno por otro. El oxígeno es analizado para estudiar su pureza y, tras ser
refrigerado, se expulsa de nuevo a la atmósfera, junto con los otros productos
separados. En caso de funcionar, significaría que no habría que transportar voluminosos
tanques de oxígeno para crear una atmósfera respirable en el hábitat a situar
en superficie, o para fabricar combustible para cohetes permitiendo el retorno a la Tierra, necesitando una especie de reactor que haga el proceso que
ensayará MOXIE en Marte. Con todo en su lugar,
Perseverance declara una masa de 1.025 kg.
No es lo único que llegará a
Marte. Siguiendo la estela creada por los Cubesats
MarCO, a bordo de
Mars Rover
2020 hay una tecnología de demostración basada también en un Cubesat. La idea
es la siguiente: tanto los
MER como
Curiosity han dedicado y dedican
demasiado tiempo a estudiar el terreno con sus cámaras para decidir hacia dónde
ir posteriormente. Pero, ¿y si les liberamos de esa tarea? La propuesta ha sido
la de enviar junto a
Perseverance un
microhelicóptero equipado con cámaras que vuele a lo largo de la ruta del rover
para ver qué accidentes geológicos hay y buscar zonas interesantes que
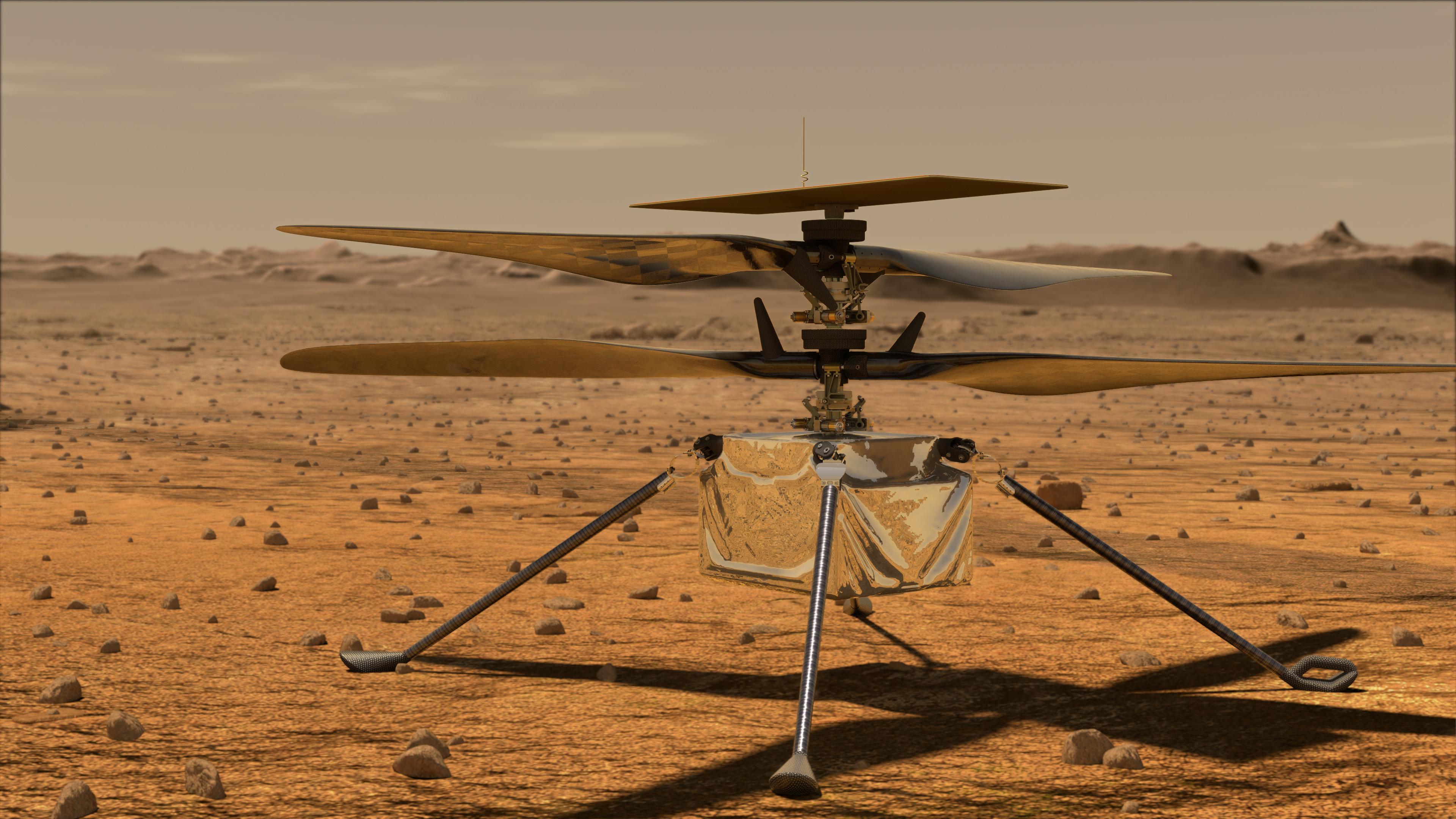
explorar. Tras pruebas satisfactorias, se decidió mandar el
Mars Helicopter, ahora conocido como
Ingenuity. La estructura se basa en un
tubo central hueco como elemento principal al que se han acoplado el resto de
componentes. En la parte inferior del tubo está el fuselaje, o cuerpo, del
pequeño helicóptero, contando con casi todo lo básico para funcionar: ordenador
(basado en un microprocesador Snapdragon, operando bajo Linux, con 2 GB de RAM
y memoria flash de 32 GB), batería de ión-litio de seis células, una unidad de
medición inercial en miniatura acompañada por un inclinómetro, un altímetro, una
cámara de navegación (apuntando hacia abajo, obteniendo imágenes monocromáticas
de 640 x 480 pixels), y una de observación frontal para imágenes a color en
alta resolución mediante filtro Bayer de 4208 x 3120 pixels, sistema de
comunicaciones directo a la Tierra operando a 900 MHz, y un sistema termal
pasivo. Cuenta con cuatro patas como tren de aterrizaje, fabricadas en fibra de
carbono y epoxi, y conectadas al fuselaje mediante unas bisagras que actúan
también como amortiguadores. Lo más importante es el sistema de rotores,
situado en la parte superior, y contando con dos situados uno

sobre otro, y
girando en forma contrarrotante. Las palas de los rotores miden 1.21 metros de
largo, y se encuentran acopladas a tres motores eléctricos engranados a una
caja de cambios de cuatro etapas que controla la velocidad, la altitud y la
inclinación. Las palas alcanzarán velocidades de rotación de hasta 2400 rpm., y
una vez operando en superficie, puede alcanzar distancias de vuelo de hasta 300
metros y altitudes de hasta 5 metros en un vuelo de 90 segundos de duración. El
último componente es el panel solar, que corona a
Ingenuity, proporcionándole la energía necesaria para funcionar en
el entorno marciano. En total, no levanta del suelo más de 50 cm. Su masa, 1.8
kg. La misión de prueba durará 30 días una vez el helicóptero sea liberado en
el suelo en una localización idónea. El helicóptero ha sido situado en la panza
de
Perseverance, y no será liberado
inmediatamente, sino que esperarán a un momento y un lugar concretos y aptos
para poder soltarlo. Su misión es independiente de las operaciones de
Perseverance, por lo que su éxito o
fracaso no está dentro de la misión del rover.
Para el vuelo desde la Tierra
a Marte y el proceso de entrada, descenso y aterrizaje, usa herencia absoluta
de
Curiosity, con etapa de crucero y
componentes de entrada idénticos; de hecho, son los repuestos. El conjunto
completo mide 3 metros de alto y 4.5 metros de diámetro, y se divide en la
propia etapa de crucero, un disco que contiene paneles solares, sistema de
propulsión y tanques de combustible, así como sensores de actitud (escáner
estelar y sensores solares) y sistema de control termal para evacuar el calor
generado dentro del vehículo de descenso. Este último componente contiene los
elementos que situaran a
Perseverance e
Ingenuity en la superficie, con el
conjunto de escudo de reentrada y aerovaina, el paracaídas de 21.5 metros de
diámetro y la mochila cohete que descenderá al rover hasta la superficie usando
también la técnica Sky Crane. A todo esto, se le suman dos cámaras más: unas
situadas para poder ver la expulsión y el inflado del paracaídas, y una situada
en la mochila cohete para ver al rover mientras desciende. Al unirlas con las
que lleva
Perseverance para operar
durante el descenso, el total es de siete. Por si faltaba poco, también habrá
investigación sobre las condiciones durante la etapa de entrada y descenso. La investigación
MEDLI2 pretende continuar la toma de mediciones sobre qué ocurre en el hardware
cuando se le somete al proceso de atravesar la atmósfera. Para
Mars Rover 2020, hay más y mejor
instrumentación. Se compone de ocho transductores de presión, siete en el
escudo de reentrada (uno hipersónico, el resto supersónicos) y el restante en
la aerovaina, 11 termopares dentro de varias losetas cerámicas del escudo de
reentrada y seis situados en el material termal de la aerovaina, y finalmente,
sensores y un radiómetro para el flujo de calor en la reentrada, situados todos
en la aerovaina. Todo este conjunto servirá para ayudar a entender el
comportamiento del vehículo de entrada en el momento de atravesar la atmósfera
marciana. El peso en báscula de todo el conjunto en el momento del lanzamiento
se aproximará a las 4 toneladas.

Otro aspecto que Perseverance recoge de Curiosity es el lugar de lanzamiento y
la configuración del lanzador que le enviará con destino al planeta rojo. De nuevo,
el escogido es el Atlas V, en la
variante 541, es decir, cofia de 5 metros, cuatro aceleradores expulsables y
etapa superior Centaur con un solo
motor. Su lanzamiento está previsto para no antes del 22, y en caso de alguna dificultad técnica, habrá
oportunidades hasta el 15 de agosto, fecha en que está previsto que se cierre la ventana. Al ser
una misión con contenido nuclear (el combustible del RTG) se hace necesaria la
autorización presidencial.
El crucero durará siete meses,
durante el cual se comprobará el estado de salud de los componentes y se
realizarán las correcciones de rumbo necesarias para ponerle en el corredor de
entrada atmosférica hacia su destino escogido. Sin importar la fecha de
lanzamiento, Perseverance llegará a
Marte el 18 de febrero del 2021. La secuencia de entrada, descenso y aterrizaje
es también una continuación de la diseñada para Curiosity. Todo empieza con la separación de la etapa de crucero,
varios minutos antes de contactar con la atmósfera. Quedándose solo el conjunto
de entrada, los motores acoplados reorientarán el vehículo para ofrecer el
escudo de reentrada al rozamiento atmosférico, situándolo en el ángulo preciso
para cruzarla. Apenas roce con la atmósfera, los propulsores se dispararán,
comenzando el proceso de entrada guiada para mejorar la precisión en el
aterrizaje y generando sustentación, suavizando el calor sentido por el escudo
de reentrada. Pasada la peor parte, la siguiente etapa es la expulsión del
paracaídas, que ocurrirá a unos 7 km. de la superficie. Aquí empiezan las
novedades. Para mejorar las posibilidades de llegar con mayor precisión al
punto deseado, se han incluido diversas nuevas tecnologías. El primero es el
Disparador de
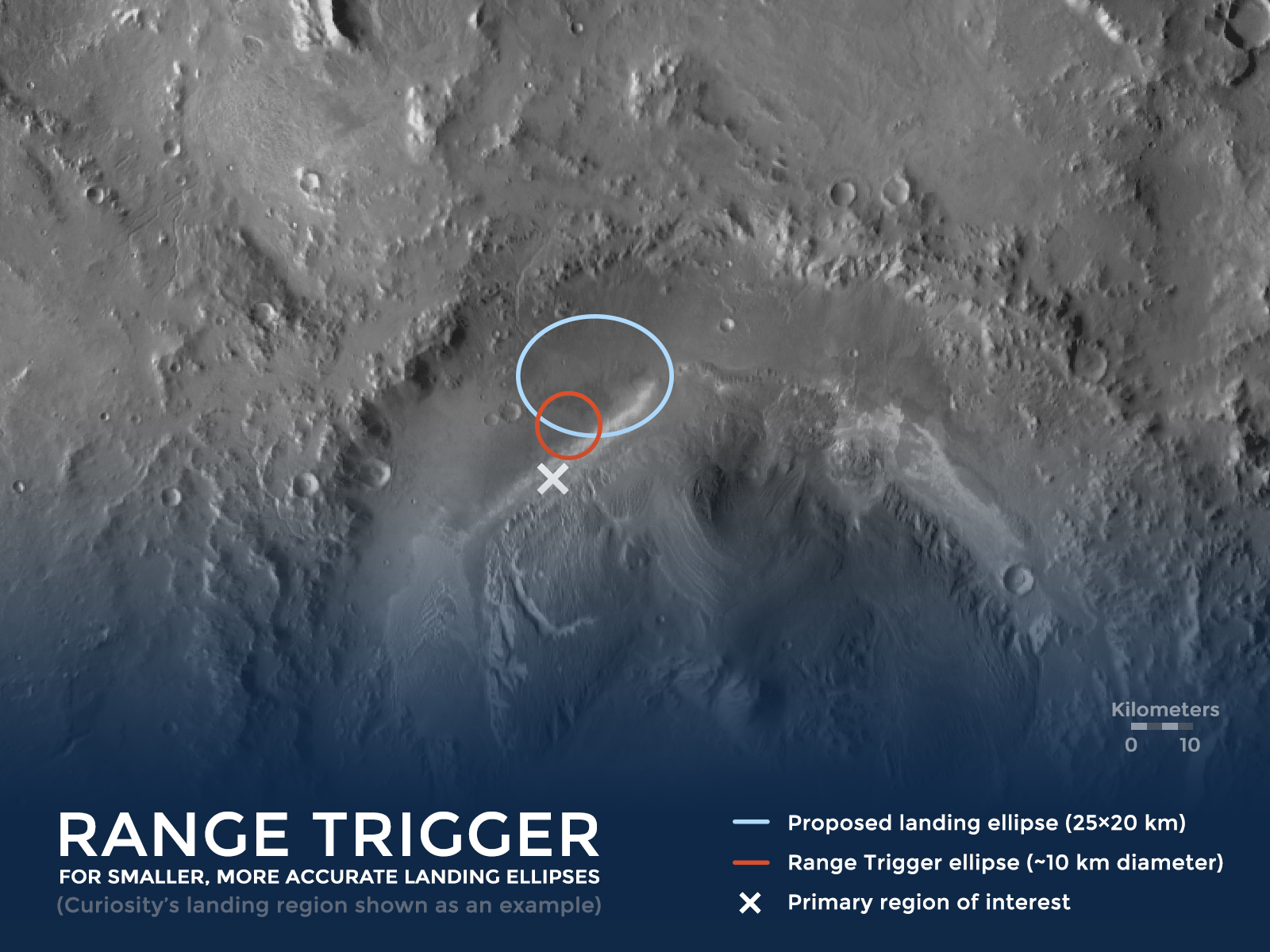
Distancia. Este sistema pretende cronometrar la apertura del
paracaídas conociendo la posición relativa del vehículo de descenso con el
lugar seleccionado para aterrizar. Así, en caso de sentir que se lo va a
saltar, desplegará el paracaídas más pronto. En caso de quedarse corto, tardará
más en lanzarlo. Con el paracaídas ya abierto y frenando el descenso, hay que
empezar a soltar peso muerto. Por ello, lo primero en expulsar es el escudo de
reentrada. Justo aquí comienza otro proceso nuevo que promete mejorar
exponencialmente la exactitud del proceso de toma de Marte. Se le conoce como
TRN o
Navegación Relativa al Terreno. Usando la cámara de descenso monocromática
situada en el rover, nada más separar el escudo de reentrada, se empezarán a
tomar imágenes. La cámara se ha diseñado únicamente para esta tarea, para
obtener imágenes no solo a una alta cadencia, también para mantener una aguda
resolución bajo todo tipo de regímenes de descenso y velocidad. Todas las
imágenes capturadas son comparadas a bordo de un ordenador especial fijado para
esta tarea en el que hay un mapa actualizado de la región escogida como zona de
aterrizaje. En caso de ver que se desvía del rumbo, este sistema provocará la
activación de los propulsores de a bordo. Durante el proceso, se producirá la
separación entre la aerovaina y el paracaídas de la etapa de descenso
propulsado y el propio rover, a aproximadamente 1.5 km. de la superficie. En esta
etapa el TRN es aun más importante porque podrá detectar zonas peligrosas para
un amartizaje, de diámetros aproximados a 300 metros, y desviarse a zonas más
seguras. Si el TRN tiene éxito, podría hacer terrenos considerados imposibles
como accesibles a otras misiones. De hecho, si en anteriores misiones, en margen
de error podía ser de entre 1 y 3 km., el TRN promete reducirlo a 60 metros, o
menos. La mochila cohete, separada de la aerovaina, primero realiza una
maniobra de desviación, antes de continuar con el descenso propiamente dicho,
desviándose según sea necesario según el TRN y, a una altitud de unos 20 metros
de la superficie, el Sky Crane hará descender a
Perseverance para la última etapa del descenso. Cuando las ruedas
del rover sientan el contacto con el suelo, los cables que le unen a la mochila
cohete se cortarán, y ésta saldrá volando a una distancia segura. El proceso,
de aproximadamente siete minutos, habrá depositado a
Perseverance en la superficie.
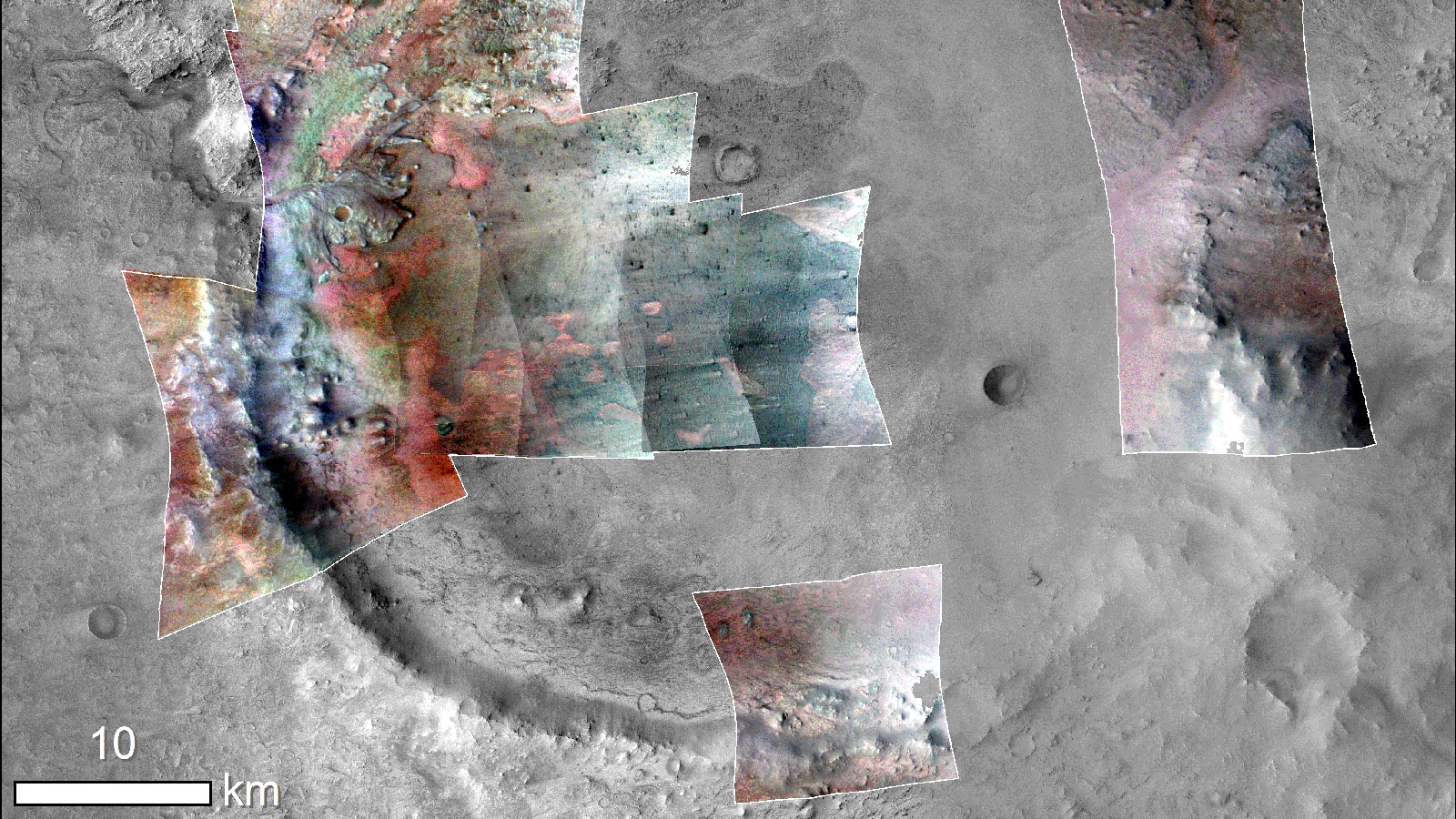
El destino de Perseverance es el cráter llamado
Jezero, nombrado por la ciudad del mismo nombre situada actualmente en Bosnia. Se
encuentra en el borde noroeste de Isidis Planitia, hacia el sureste de Nili
Fossae (coordenadas marcianas 18.4º N, 77.6 E). La razón de escoger este lugar
es por su delta en su borde noroeste, al ser la desembocadura de un canal que
parece ser bastante profundo. Allí se han detectado minerales arcillosos en
abundancia, como la esmectita. La teoría es que el cráter Jezero (como el Gale,
hogar de Curiosity o Gusev, el de Spirit) albergara en el pasado un lago. Como
las arcillas se forman únicamente en presencia de agua, es un excelente
candidato no solo para encontrar áreas alteradas por el líquido elemento,
también un entorno apto para el desarrollo de vida. Y si hubo vida, podría haber
quedado encerrada en esas rocas arcillosas en forma de fósil. A por eso va Perseverance.
El primer día del rover en
superficie estará marcado, al igual que misiones anteriores, como el Sol 0, y
las primeras actividades serán tomar imágenes con las HazCam (aún con la tapa
puesta) y enviar las primeras señales, indicando que está bien y preparado para
los siguientes pasos. En los siguientes días tocará comprobar que todo
funciona, la descarga de la información recogida durante el proceso de
aterrizaje, el despliegue del mástil de instrumentos y la separación de las
tapas de las cámaras. Más tarde, se comprobarán los instrumentos y el sistema
de movilidad. Cuando las cámaras en el mástil obtengan sus primeros panoramas,
serán sus controladores los que decidan qué rumbo tomar, aunque si llega con la

precisión buscada, ya hay ruta planificada. Como Curiosity, su tarea primaria se prolongará durante 687 días
terrestres, es decir, un año marciano. Durante este tiempo, se busca explorar
un lugar geológicamente diverso, comprobar la posible antigua habitabilidad del
entorno, buscar señales de vida antigua fosilizada, con preferencia en rocas
aptas para ello, y recoger muestras de roca y polvo para una eventual
recuperación y transporte a la Tierra, sin dejar de lado las demostraciones
tecnológicas para exploraciones futuras, tanto robóticas como tripuladas. En el
caso de la recogida de muestras, será un proceso largo en el tiempo. Lo primero
será seleccionar los objetivos más idóneos, primero desde la distancia con
MastCam-Z y SuperCam, y luego desde cerca con SHERLOC y PIXL.
Cuando la roca o
suelo de interés cumple los criterios del proyecto (y especialmente si se
detectan las bioseñales que quedan en los probables fósiles) será turno del
taladro para taladrar, recoger la muestra, sellarla en uno de los tubos de
muestra, y guardarla. Más tarde, a medida que el rover continúa la travesía, la
gente de la misión puede decidir depositar uno o más tubos de muestras en la superficie,
una localización que pasará a ser llamada Depósito de Almacenaje de Muestras. No
solo se depositarán las muestras en una localización escogida, también será
extensamente caracterizada con las cámaras para obtener los puntos de
referencia del lugar, al tiempo que los orbitadores (especialmente MRO) capturan imágenes de documentación
del mismo sitio. Todo ello garantizará que futuras misiones dedicadas en
exclusiva para esto tengan los puntos de referencia para llegar a ellas. En cuanto
al helicóptero Ingenuity, se
esperarán a encontrar un sitio plano, llano y lo más libre de rocas para
depositarlo en el suelo. Con el rover fuera del camino, el helicóptero empezará
sus primeras pruebas de vuelo. Es capaz de aguantar temperaturas de hasta -100ºC,
y aunque solo se garantiza su misión durante 30 días, bien podría aguantar más
y apoyar las operaciones de Perseverance en
superficie. Naturalmente, llegado el fin de la tarea primaria, sin duda
comenzarán las extendidas, ampliando lo ya recogido, y tal vez encontrando
nuevos objetivos a cumplir.
Elementos viejos, nueva
tecnología, y con los viajes tripulados en mente. Así es Perseverance, el nuevo rover de la NASA. Sus antecesores fueron, y
son, éxitos brillantes, por lo que solo nos cabe preguntarnos: ¿vivirá para
cumplir las expectativas o superarlas? El tiempo lo dirá.











 ultravioleta. Los dos canales están montados en
una misma carcasa, aunque cuentan con ópticas separadas. El canal visible
cuenta con un sencillo sistema de de lentes que proporciona una longitud focal
de 51 mm. (f/4.25) sirviendo a un
sensor CMOS de 4096 x 3072 pixels, proporcionando una resolución a la distancia
mínima a Marte de 2.2 km., cubriendo todo el globo marciano. Una rueda de
filtros permitirá seleccionar la longitud de onda a observar: azul (437 nm),
verde (546 nm) y rojo (635 nm). En cuanto al canal ultravioleta, dispone de un
sistema óptico de 48 mm. de longitud focal (f/3.6)
que sirve a un idéntico sensor CMOS, permitiendo una resolución en el perigeo
de 2.3 km. mientras observa Marte globalmente. También cuenta con rueda de
filtros, permitido observar el planeta en tres bandas ultravioleta: 220, 260 y
320 nm. Además, el sistema cuenta con una tapa capaz de abrirse y cerrarse
según las necesidades. Además de captar instantáneas a color del planeta rojo,
desde su alta percha sobre el planeta podrá observar en su totalidad el polvo
en suspensión así como la aparición de espesas nubes levantadas desde la
superficie en luz visible (635 nm) y ultravioleta (220 nm), la formación y
evolución de las nubes de hielo de agua mediante la banda ultravioleta de los
320 nm, y estudiar la abundancia del ozono con la banda de los 260 nm. De
hecho, en estos dos últimos objetivos, EXI se ha diseñado para compartir
longitudes de onda con el sistema MARCI de MRO.
El desarrollo de este instrumento ha sido dirigido por LASP, con contribuciones
del Laboratorio de Ciencias del Espacio de la Universidad de California en
Berkeley y, por supuesto, del Centro Espacial Mohammed Bin Rashid de Dubai.
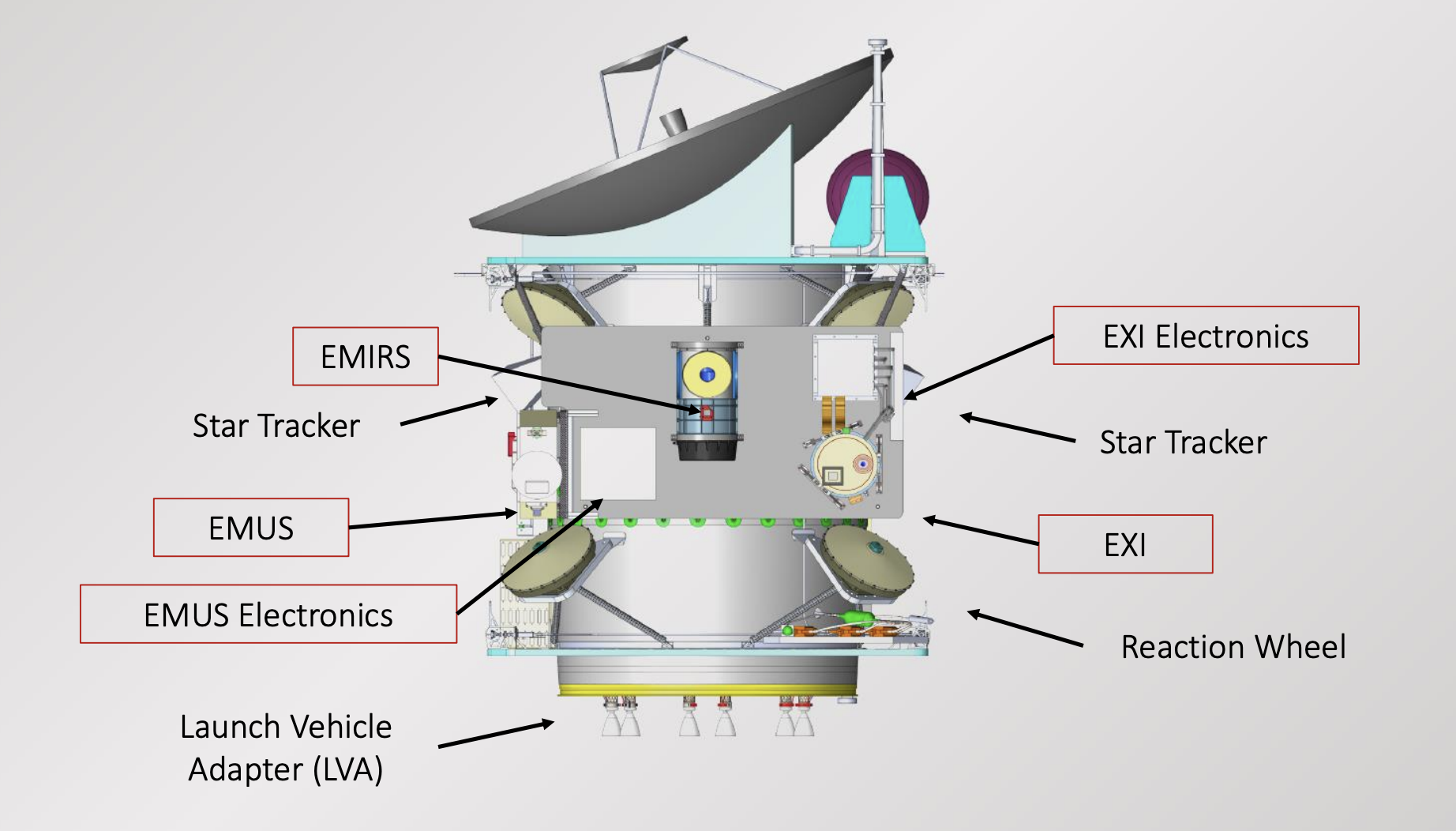
EMIRS, el Espectrómetro Infrarrojo Marciano de los
ultravioleta. Los dos canales están montados en
una misma carcasa, aunque cuentan con ópticas separadas. El canal visible
cuenta con un sencillo sistema de de lentes que proporciona una longitud focal
de 51 mm. (f/4.25) sirviendo a un
sensor CMOS de 4096 x 3072 pixels, proporcionando una resolución a la distancia
mínima a Marte de 2.2 km., cubriendo todo el globo marciano. Una rueda de
filtros permitirá seleccionar la longitud de onda a observar: azul (437 nm),
verde (546 nm) y rojo (635 nm). En cuanto al canal ultravioleta, dispone de un
sistema óptico de 48 mm. de longitud focal (f/3.6)
que sirve a un idéntico sensor CMOS, permitiendo una resolución en el perigeo
de 2.3 km. mientras observa Marte globalmente. También cuenta con rueda de
filtros, permitido observar el planeta en tres bandas ultravioleta: 220, 260 y
320 nm. Además, el sistema cuenta con una tapa capaz de abrirse y cerrarse
según las necesidades. Además de captar instantáneas a color del planeta rojo,
desde su alta percha sobre el planeta podrá observar en su totalidad el polvo
en suspensión así como la aparición de espesas nubes levantadas desde la
superficie en luz visible (635 nm) y ultravioleta (220 nm), la formación y
evolución de las nubes de hielo de agua mediante la banda ultravioleta de los
320 nm, y estudiar la abundancia del ozono con la banda de los 260 nm. De
hecho, en estos dos últimos objetivos, EXI se ha diseñado para compartir
longitudes de onda con el sistema MARCI de MRO.
El desarrollo de este instrumento ha sido dirigido por LASP, con contribuciones
del Laboratorio de Ciencias del Espacio de la Universidad de California en
Berkeley y, por supuesto, del Centro Espacial Mohammed Bin Rashid de Dubai.
EMIRS, el Espectrómetro Infrarrojo Marciano de los