

Ahora que Curiosity está en el espacio, es momento de hablar algo más detenidamente de algunas de sus características, de las que en otra entrada no comentamos. Este es el momento.
Antes de empezar, debemos recordar que este tremendo vehículo ha sido construido partiendo de la experiencia acumulada gracias a sus predecesores Sojourner, Spirit y Opportunity, y básicamente, posee características idénticas. Varios de los parámetros estrenados en el diminuto todoterreno de 1997 fueron adaptados y mejorados para sus hermanos mayores, los MER, y ahora el MSL también las equipa.
En total, Curiosity porta 12 cámaras de ingeniería, por las seis de los MER. Se reparten en cuatro  cámaras de navegación y 8 cámaras de prevención de obstáculos, también llamadas NavCam y HazCam. Ambos sistemas son versiones casi idénticas a las que están funcionando por Marte a bordo de Opportunity, y evidentemente, servirán para lo mismo. Las cuatro NavCam están situadas junto al sistema Mastcam, en la parte exterior del montaje, en grupos de dos cámaras colocadas en vertical. Proporcionarán imágenes de navegación en blanco y negro, y combinadas también podrán realizar imágenes estéreo de la superficie. El sistema es redundante, por eso equipa cuatro cámaras. La separación entre ambas cámaras es el doble que en los MER, lo que mejorará las imágenes en 3D. Las cuatro cámaras tienen una apertura f/12, y son capaces de captar detalles de un tamaño de dos centímetros a 25 metros de distancia, y puede enfocar cualquier cosa desde 50 centímetros hasta el infinito
cámaras de navegación y 8 cámaras de prevención de obstáculos, también llamadas NavCam y HazCam. Ambos sistemas son versiones casi idénticas a las que están funcionando por Marte a bordo de Opportunity, y evidentemente, servirán para lo mismo. Las cuatro NavCam están situadas junto al sistema Mastcam, en la parte exterior del montaje, en grupos de dos cámaras colocadas en vertical. Proporcionarán imágenes de navegación en blanco y negro, y combinadas también podrán realizar imágenes estéreo de la superficie. El sistema es redundante, por eso equipa cuatro cámaras. La separación entre ambas cámaras es el doble que en los MER, lo que mejorará las imágenes en 3D. Las cuatro cámaras tienen una apertura f/12, y son capaces de captar detalles de un tamaño de dos centímetros a 25 metros de distancia, y puede enfocar cualquier cosa desde 50 centímetros hasta el infinito
 cámaras de navegación y 8 cámaras de prevención de obstáculos, también llamadas NavCam y HazCam. Ambos sistemas son versiones casi idénticas a las que están funcionando por Marte a bordo de Opportunity, y evidentemente, servirán para lo mismo. Las cuatro NavCam están situadas junto al sistema Mastcam, en la parte exterior del montaje, en grupos de dos cámaras colocadas en vertical. Proporcionarán imágenes de navegación en blanco y negro, y combinadas también podrán realizar imágenes estéreo de la superficie. El sistema es redundante, por eso equipa cuatro cámaras. La separación entre ambas cámaras es el doble que en los MER, lo que mejorará las imágenes en 3D. Las cuatro cámaras tienen una apertura f/12, y son capaces de captar detalles de un tamaño de dos centímetros a 25 metros de distancia, y puede enfocar cualquier cosa desde 50 centímetros hasta el infinito
cámaras de navegación y 8 cámaras de prevención de obstáculos, también llamadas NavCam y HazCam. Ambos sistemas son versiones casi idénticas a las que están funcionando por Marte a bordo de Opportunity, y evidentemente, servirán para lo mismo. Las cuatro NavCam están situadas junto al sistema Mastcam, en la parte exterior del montaje, en grupos de dos cámaras colocadas en vertical. Proporcionarán imágenes de navegación en blanco y negro, y combinadas también podrán realizar imágenes estéreo de la superficie. El sistema es redundante, por eso equipa cuatro cámaras. La separación entre ambas cámaras es el doble que en los MER, lo que mejorará las imágenes en 3D. Las cuatro cámaras tienen una apertura f/12, y son capaces de captar detalles de un tamaño de dos centímetros a 25 metros de distancia, y puede enfocar cualquier cosa desde 50 centímetros hasta el infinito Las cámaras de prevención de obstáculos (o HazCam) en Curiosity son 8, cuatro en la parte delantera, y cuatro en la trasera, éstas situadas en parejas a cada lado del soporte del MMRTG. También derivan de las que llevan los MER, y son cámaras con lentes de ojo de pez, capaces de distinguir objetos de dos centímetros a 10 metros de distancia, y es capaz de ver desde cosas de 10 centímetros hasta el infinito. En gran medida el funcionamiento es idéntico al de las NavCam, y también proporcionarán imágenes estéreo del lugar en el que se encuentren. El sistema delantero está a 68 centímetros del suelo, y el trasero 10 centímetros más alto. Las HazCam estarán protegidas durante el vuelo y amartizaje por unas cubiertas,
delantera, y cuatro en la trasera, éstas situadas en parejas a cada lado del soporte del MMRTG. También derivan de las que llevan los MER, y son cámaras con lentes de ojo de pez, capaces de distinguir objetos de dos centímetros a 10 metros de distancia, y es capaz de ver desde cosas de 10 centímetros hasta el infinito. En gran medida el funcionamiento es idéntico al de las NavCam, y también proporcionarán imágenes estéreo del lugar en el que se encuentren. El sistema delantero está a 68 centímetros del suelo, y el trasero 10 centímetros más alto. Las HazCam estarán protegidas durante el vuelo y amartizaje por unas cubiertas,  que una vez esté posado en el suelo marciano el todoterreno, unos mecanismos pirotécnicos se encargarán de retirar, para permitir su visión. La labor continuada de los MER en el planeta rojo ha permitido que la programación del sistema de navegación pueda tomar sus propias decisiones, basándose básicamente en las imágenes de las HazCam, y es una característica que Curiosity poseerá. Claro, que también responderá a las órdenes desde el centro de control, desde el cual se enviará la ruta a seguir planeada tras el estudio de las imágenes de las NavCam o incluso del sistema Mastcam.
que una vez esté posado en el suelo marciano el todoterreno, unos mecanismos pirotécnicos se encargarán de retirar, para permitir su visión. La labor continuada de los MER en el planeta rojo ha permitido que la programación del sistema de navegación pueda tomar sus propias decisiones, basándose básicamente en las imágenes de las HazCam, y es una característica que Curiosity poseerá. Claro, que también responderá a las órdenes desde el centro de control, desde el cual se enviará la ruta a seguir planeada tras el estudio de las imágenes de las NavCam o incluso del sistema Mastcam.
 delantera, y cuatro en la trasera, éstas situadas en parejas a cada lado del soporte del MMRTG. También derivan de las que llevan los MER, y son cámaras con lentes de ojo de pez, capaces de distinguir objetos de dos centímetros a 10 metros de distancia, y es capaz de ver desde cosas de 10 centímetros hasta el infinito. En gran medida el funcionamiento es idéntico al de las NavCam, y también proporcionarán imágenes estéreo del lugar en el que se encuentren. El sistema delantero está a 68 centímetros del suelo, y el trasero 10 centímetros más alto. Las HazCam estarán protegidas durante el vuelo y amartizaje por unas cubiertas,
delantera, y cuatro en la trasera, éstas situadas en parejas a cada lado del soporte del MMRTG. También derivan de las que llevan los MER, y son cámaras con lentes de ojo de pez, capaces de distinguir objetos de dos centímetros a 10 metros de distancia, y es capaz de ver desde cosas de 10 centímetros hasta el infinito. En gran medida el funcionamiento es idéntico al de las NavCam, y también proporcionarán imágenes estéreo del lugar en el que se encuentren. El sistema delantero está a 68 centímetros del suelo, y el trasero 10 centímetros más alto. Las HazCam estarán protegidas durante el vuelo y amartizaje por unas cubiertas,  que una vez esté posado en el suelo marciano el todoterreno, unos mecanismos pirotécnicos se encargarán de retirar, para permitir su visión. La labor continuada de los MER en el planeta rojo ha permitido que la programación del sistema de navegación pueda tomar sus propias decisiones, basándose básicamente en las imágenes de las HazCam, y es una característica que Curiosity poseerá. Claro, que también responderá a las órdenes desde el centro de control, desde el cual se enviará la ruta a seguir planeada tras el estudio de las imágenes de las NavCam o incluso del sistema Mastcam.
que una vez esté posado en el suelo marciano el todoterreno, unos mecanismos pirotécnicos se encargarán de retirar, para permitir su visión. La labor continuada de los MER en el planeta rojo ha permitido que la programación del sistema de navegación pueda tomar sus propias decisiones, basándose básicamente en las imágenes de las HazCam, y es una característica que Curiosity poseerá. Claro, que también responderá a las órdenes desde el centro de control, desde el cual se enviará la ruta a seguir planeada tras el estudio de las imágenes de las NavCam o incluso del sistema Mastcam.En cuanto a los sistemas científicos, seguimos con las cámaras. En el anterior artículo ya hablamos de estos instrumentos, aunque hay características que nos saltamos. Empezamos con la que se usará primero, la MARDI, la cámara de descenso. La cámara
 que grabará el recorrido final en su amartizaje no es solo una cámara de vídeo de campo ancho, lo es a todo color, ya que equipa un tipo de filtro que es usado actualmente en todas las cámaras digitales que extisten a la venta. Grabará imágenes con un tamaño de 1600 x 1200 pixels por frame (imágenes de prueba aquí), que serán grabadas en una memoria flash interna con una capacidad de 8 Gb. Unas primeras imágenes desde esta cámara permitirán a los controladores de Curiosity tener las primeras impresiones sobre el lugar de aterrizaje. Dependiendo de la prioridad que haya en los siguientes días, el resto de la secuencia de la toma de Marte llegará al centro de control, donde las conjuntarán y nos proporcionará el vídeo desde el momento en que el escudo de reentrada se separa hasta que las ruedas han tocado el suelo. Desde una altura de 2 km., tomará instantáneas con una resolución de metro y medio. No solo eso, sino que durante el recorrido de misión, será usada para tomar imágenes directas del suelo obteniendo instantáneas de una resolución de 1’5 milímetros, para uso geológico o de seguimiento de sus recorridos.
que grabará el recorrido final en su amartizaje no es solo una cámara de vídeo de campo ancho, lo es a todo color, ya que equipa un tipo de filtro que es usado actualmente en todas las cámaras digitales que extisten a la venta. Grabará imágenes con un tamaño de 1600 x 1200 pixels por frame (imágenes de prueba aquí), que serán grabadas en una memoria flash interna con una capacidad de 8 Gb. Unas primeras imágenes desde esta cámara permitirán a los controladores de Curiosity tener las primeras impresiones sobre el lugar de aterrizaje. Dependiendo de la prioridad que haya en los siguientes días, el resto de la secuencia de la toma de Marte llegará al centro de control, donde las conjuntarán y nos proporcionará el vídeo desde el momento en que el escudo de reentrada se separa hasta que las ruedas han tocado el suelo. Desde una altura de 2 km., tomará instantáneas con una resolución de metro y medio. No solo eso, sino que durante el recorrido de misión, será usada para tomar imágenes directas del suelo obteniendo instantáneas de una resolución de 1’5 milímetros, para uso geológico o de seguimiento de sus recorridos. También es a todo color la MAHLI. Es enfocable, y servirá para lo mismo que las MI de los MER, aunque la dif erencia es que al obtener imágenes en color el estudio de las rocas será óptimo. Deriva así mismo de las cámaras comerciales, así como su sistema de autoenfoque y en el dispositivo CCD. Posee cuatro juegos de luces de diodos, dos de ellos son luces blancas para tomar imágenes de objetivos en sombra o para imágenes nocturnas, mientras que las otras dos proporcionan luz ultravioleta para que los minerales de las rocas resalten bajo esa luz. Desde una distancia de un metro, distinguirá cosas con un tamaño de medio milímetro. Además, es capaz de apuntar hasta el infinito, por lo que se usará para tomar imágenes de navegación, para revisar la estructura de Curiosity, y como el brazo robot es capaz de subir más alto que la altura del mástil de las cámaras, será capaz de tomar “autorretratos”, para diversos fines. Este es posiblemente el objetivo más versátil. Tomará imágenes de 1600 x 1200 pixels (imágenes de prueba aquí), y las imágenes se guardarán en una memoria interna de 8 Gb.
erencia es que al obtener imágenes en color el estudio de las rocas será óptimo. Deriva así mismo de las cámaras comerciales, así como su sistema de autoenfoque y en el dispositivo CCD. Posee cuatro juegos de luces de diodos, dos de ellos son luces blancas para tomar imágenes de objetivos en sombra o para imágenes nocturnas, mientras que las otras dos proporcionan luz ultravioleta para que los minerales de las rocas resalten bajo esa luz. Desde una distancia de un metro, distinguirá cosas con un tamaño de medio milímetro. Además, es capaz de apuntar hasta el infinito, por lo que se usará para tomar imágenes de navegación, para revisar la estructura de Curiosity, y como el brazo robot es capaz de subir más alto que la altura del mástil de las cámaras, será capaz de tomar “autorretratos”, para diversos fines. Este es posiblemente el objetivo más versátil. Tomará imágenes de 1600 x 1200 pixels (imágenes de prueba aquí), y las imágenes se guardarán en una memoria interna de 8 Gb.
 erencia es que al obtener imágenes en color el estudio de las rocas será óptimo. Deriva así mismo de las cámaras comerciales, así como su sistema de autoenfoque y en el dispositivo CCD. Posee cuatro juegos de luces de diodos, dos de ellos son luces blancas para tomar imágenes de objetivos en sombra o para imágenes nocturnas, mientras que las otras dos proporcionan luz ultravioleta para que los minerales de las rocas resalten bajo esa luz. Desde una distancia de un metro, distinguirá cosas con un tamaño de medio milímetro. Además, es capaz de apuntar hasta el infinito, por lo que se usará para tomar imágenes de navegación, para revisar la estructura de Curiosity, y como el brazo robot es capaz de subir más alto que la altura del mástil de las cámaras, será capaz de tomar “autorretratos”, para diversos fines. Este es posiblemente el objetivo más versátil. Tomará imágenes de 1600 x 1200 pixels (imágenes de prueba aquí), y las imágenes se guardarán en una memoria interna de 8 Gb.
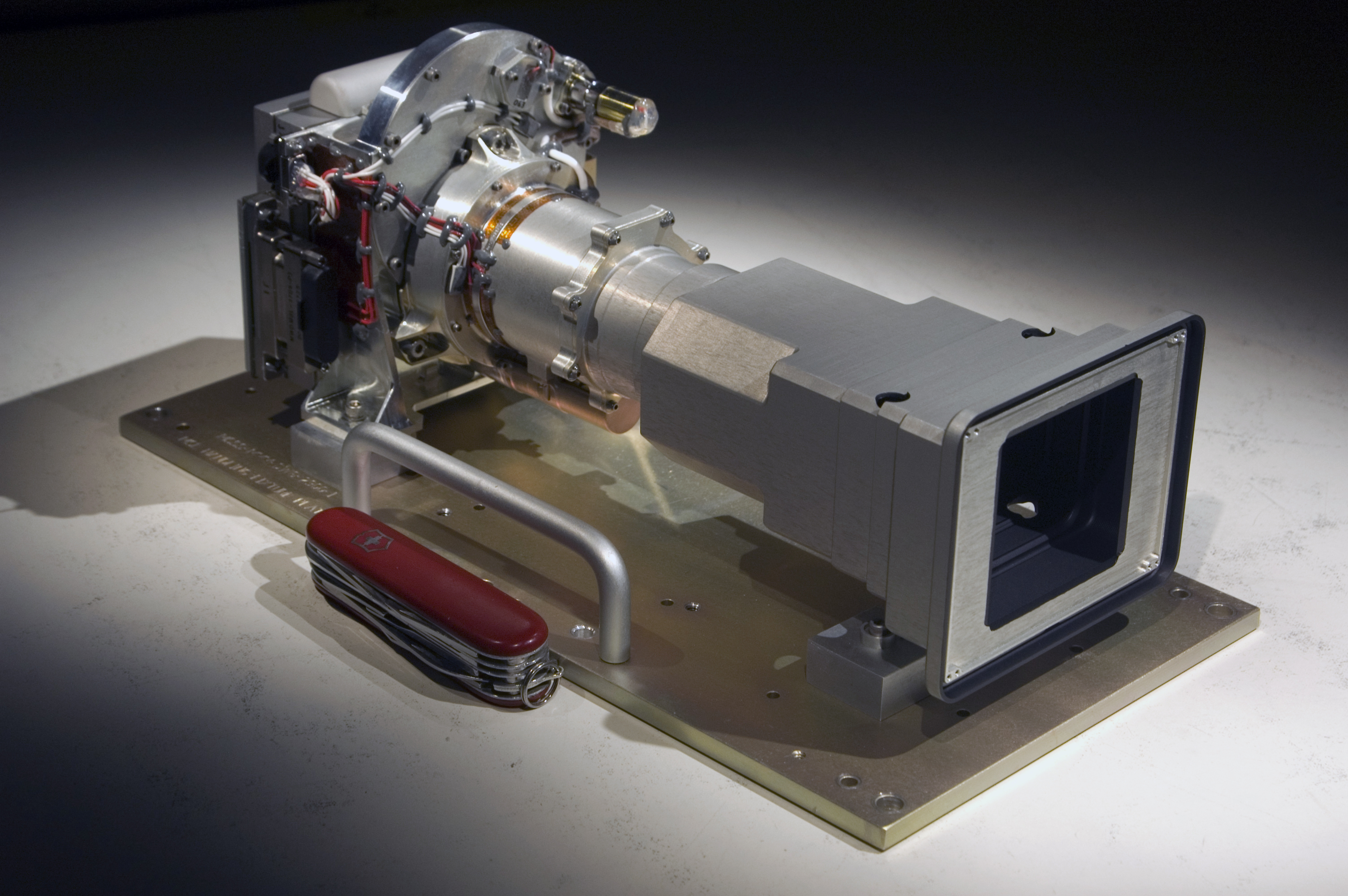
erencia es que al obtener imágenes en color el estudio de las rocas será óptimo. Deriva así mismo de las cámaras comerciales, así como su sistema de autoenfoque y en el dispositivo CCD. Posee cuatro juegos de luces de diodos, dos de ellos son luces blancas para tomar imágenes de objetivos en sombra o para imágenes nocturnas, mientras que las otras dos proporcionan luz ultravioleta para que los minerales de las rocas resalten bajo esa luz. Desde una distancia de un metro, distinguirá cosas con un tamaño de medio milímetro. Además, es capaz de apuntar hasta el infinito, por lo que se usará para tomar imágenes de navegación, para revisar la estructura de Curiosity, y como el brazo robot es capaz de subir más alto que la altura del mástil de las cámaras, será capaz de tomar “autorretratos”, para diversos fines. Este es posiblemente el objetivo más versátil. Tomará imágenes de 1600 x 1200 pixels (imágenes de prueba aquí), y las imágenes se guardarán en una memoria interna de 8 Gb.La herramienta más potente de Curiosity es el ChemCam, y es la que le proporciona ese aspecto
 de cíclope tan pa rticular. ChemCam se divide en dos partes, la microcámara remota (RMI), y el espectrógrafo de rotura inducido por láser (LIBS). El LIBS emite un haz láser de infrarrojos a una distancia de hasta 7 metros, vaporizando el lugar en que ha chocado. La luz emitida por la vaporización es analizada por el espectrógrafo, a través del telescopio de 110 mm. de apertura del RMI y una red de fibra óptica que viaja hacia el instrumento. Es capaz de calcular sin duda alguna la composición química de cualquier cosa que analice, incluso el agua. El RMI será capaz de realizar imágenes monocromáticas de 1024 x 1024 pixels de la zona vaporizada, para ponerlas en contexto, o realizar imágenes con independencia de la herramienta láser.
de cíclope tan pa rticular. ChemCam se divide en dos partes, la microcámara remota (RMI), y el espectrógrafo de rotura inducido por láser (LIBS). El LIBS emite un haz láser de infrarrojos a una distancia de hasta 7 metros, vaporizando el lugar en que ha chocado. La luz emitida por la vaporización es analizada por el espectrógrafo, a través del telescopio de 110 mm. de apertura del RMI y una red de fibra óptica que viaja hacia el instrumento. Es capaz de calcular sin duda alguna la composición química de cualquier cosa que analice, incluso el agua. El RMI será capaz de realizar imágenes monocromáticas de 1024 x 1024 pixels de la zona vaporizada, para ponerlas en contexto, o realizar imágenes con independencia de la herramienta láser.Y por último, las Mastcam. Cuando el proyecto del MSL se comenzó a gestar, la idea original de las

Mastcam era el de montar en el todoterreno dos cámaras gemelas con zoom incorporado, lo que las hubiera convertido en las primeras de su
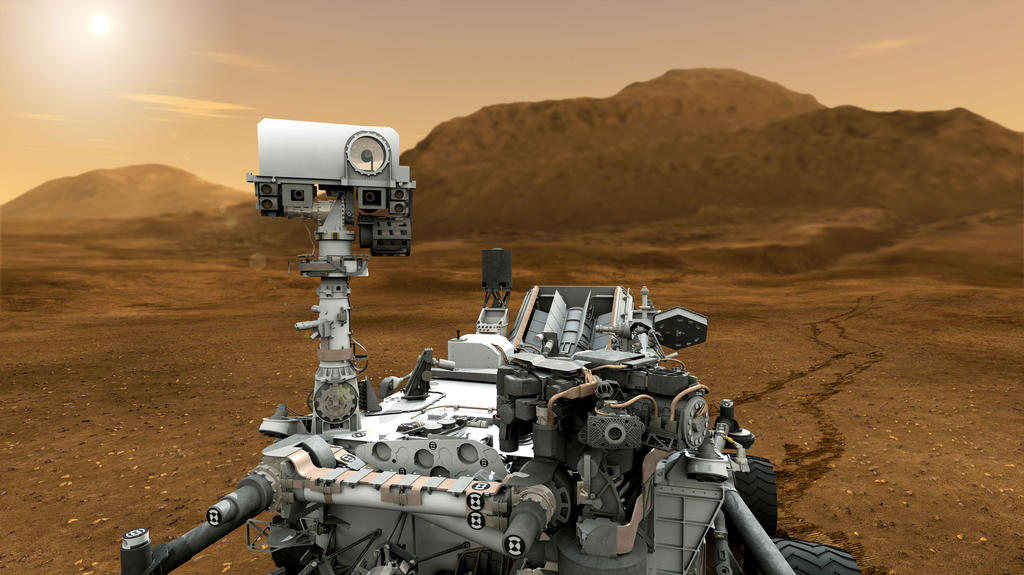
propició que otro tipo de cámaras fueran diseñadas, y que finalmente serán las que viajarán a Marte. Sobre las cámaras gemelas con zoom, se siguió trabajando en ellas hasta que llegó la notificación oficial de que serían las otras, más  sencillas y ya terminadas, las que volarían. Por lo tanto, las Mastcam son dos cámaras para dos objetivos concretos. En el lado derecho se sitúa la Mastcam-100. Diseñada para imágenes en modo teleobjetivo, lleva una lente con una longitud focal de 100 milímetros, como su nombre indica. Será capaz de distinguir objetos de al menos 7 centímetros a un km. de distancia. A la izquierda, la Mastcam-34, con una lente de longitud focal de 34 milímetros, para función de gran angular, realizando imágenes de campo ancho 3 veces más extensas que la Mastcam-100, y es capaz de distinguir objetos de 22 centímetros a 1 km. del todoterreno. En el resto, son prácticamente iguales: son cámaras a todo color de 2 megapixels, capaces de tomar instantáneas de 1600 x 1200 pixels (imágenes de prueba aquí). Cada cámara posee su propia memoria interna de 8 Gb, capaces de guardar miles de imágenes antes de su transmisión al centro de control. Ambas cámaras están situadas a 2 metros del suelo y se separan 25 centímetros la una de la otra. Las imágenes se pueden combinar para crear instantáneas estereoscópicas, y gracias a sus filtros, también son capaces de observar el espectro de infrarrojo cercano, así como otro filtro especial permitirá apuntar directamente al Sol para calcular la cantidad de polvo en suspensión en la atmósfera. Mastcam-34 también servirá para realizar las clásicas imágenes de 360º alrededor del vehículo
sencillas y ya terminadas, las que volarían. Por lo tanto, las Mastcam son dos cámaras para dos objetivos concretos. En el lado derecho se sitúa la Mastcam-100. Diseñada para imágenes en modo teleobjetivo, lleva una lente con una longitud focal de 100 milímetros, como su nombre indica. Será capaz de distinguir objetos de al menos 7 centímetros a un km. de distancia. A la izquierda, la Mastcam-34, con una lente de longitud focal de 34 milímetros, para función de gran angular, realizando imágenes de campo ancho 3 veces más extensas que la Mastcam-100, y es capaz de distinguir objetos de 22 centímetros a 1 km. del todoterreno. En el resto, son prácticamente iguales: son cámaras a todo color de 2 megapixels, capaces de tomar instantáneas de 1600 x 1200 pixels (imágenes de prueba aquí). Cada cámara posee su propia memoria interna de 8 Gb, capaces de guardar miles de imágenes antes de su transmisión al centro de control. Ambas cámaras están situadas a 2 metros del suelo y se separan 25 centímetros la una de la otra. Las imágenes se pueden combinar para crear instantáneas estereoscópicas, y gracias a sus filtros, también son capaces de observar el espectro de infrarrojo cercano, así como otro filtro especial permitirá apuntar directamente al Sol para calcular la cantidad de polvo en suspensión en la atmósfera. Mastcam-34 también servirá para realizar las clásicas imágenes de 360º alrededor del vehículo
tipo en viajar a otro planeta. El lento desarrollo de estos objetivos
 sencillas y ya terminadas, las que volarían. Por lo tanto, las Mastcam son dos cámaras para dos objetivos concretos. En el lado derecho se sitúa la Mastcam-100. Diseñada para imágenes en modo teleobjetivo, lleva una lente con una longitud focal de 100 milímetros, como su nombre indica. Será capaz de distinguir objetos de al menos 7 centímetros a un km. de distancia. A la izquierda, la Mastcam-34, con una lente de longitud focal de 34 milímetros, para función de gran angular, realizando imágenes de campo ancho 3 veces más extensas que la Mastcam-100, y es capaz de distinguir objetos de 22 centímetros a 1 km. del todoterreno. En el resto, son prácticamente iguales: son cámaras a todo color de 2 megapixels, capaces de tomar instantáneas de 1600 x 1200 pixels (imágenes de prueba aquí). Cada cámara posee su propia memoria interna de 8 Gb, capaces de guardar miles de imágenes antes de su transmisión al centro de control. Ambas cámaras están situadas a 2 metros del suelo y se separan 25 centímetros la una de la otra. Las imágenes se pueden combinar para crear instantáneas estereoscópicas, y gracias a sus filtros, también son capaces de observar el espectro de infrarrojo cercano, así como otro filtro especial permitirá apuntar directamente al Sol para calcular la cantidad de polvo en suspensión en la atmósfera. Mastcam-34 también servirá para realizar las clásicas imágenes de 360º alrededor del vehículo
sencillas y ya terminadas, las que volarían. Por lo tanto, las Mastcam son dos cámaras para dos objetivos concretos. En el lado derecho se sitúa la Mastcam-100. Diseñada para imágenes en modo teleobjetivo, lleva una lente con una longitud focal de 100 milímetros, como su nombre indica. Será capaz de distinguir objetos de al menos 7 centímetros a un km. de distancia. A la izquierda, la Mastcam-34, con una lente de longitud focal de 34 milímetros, para función de gran angular, realizando imágenes de campo ancho 3 veces más extensas que la Mastcam-100, y es capaz de distinguir objetos de 22 centímetros a 1 km. del todoterreno. En el resto, son prácticamente iguales: son cámaras a todo color de 2 megapixels, capaces de tomar instantáneas de 1600 x 1200 pixels (imágenes de prueba aquí). Cada cámara posee su propia memoria interna de 8 Gb, capaces de guardar miles de imágenes antes de su transmisión al centro de control. Ambas cámaras están situadas a 2 metros del suelo y se separan 25 centímetros la una de la otra. Las imágenes se pueden combinar para crear instantáneas estereoscópicas, y gracias a sus filtros, también son capaces de observar el espectro de infrarrojo cercano, así como otro filtro especial permitirá apuntar directamente al Sol para calcular la cantidad de polvo en suspensión en la atmósfera. Mastcam-34 también servirá para realizar las clásicas imágenes de 360º alrededor del vehículo 
para examinar cada localización en la que se detenga. Para ello tardará unos 25 minutos y tomará 150 imágenes para completar un giro completo. Gracias a Mastcam-100 y su capacidad de ver más lejos que ninguna otra cámara, podrá identificar cualquier característica de la superficie que llame la atención a sus científicos para luego dirigirse a ella. Además, cada una es capaz de grabar vídeo en alta definición (720p) a una velocidad de captura de entre 4 y 7 frames por segundo, dependiendo del tiempo de exposición.
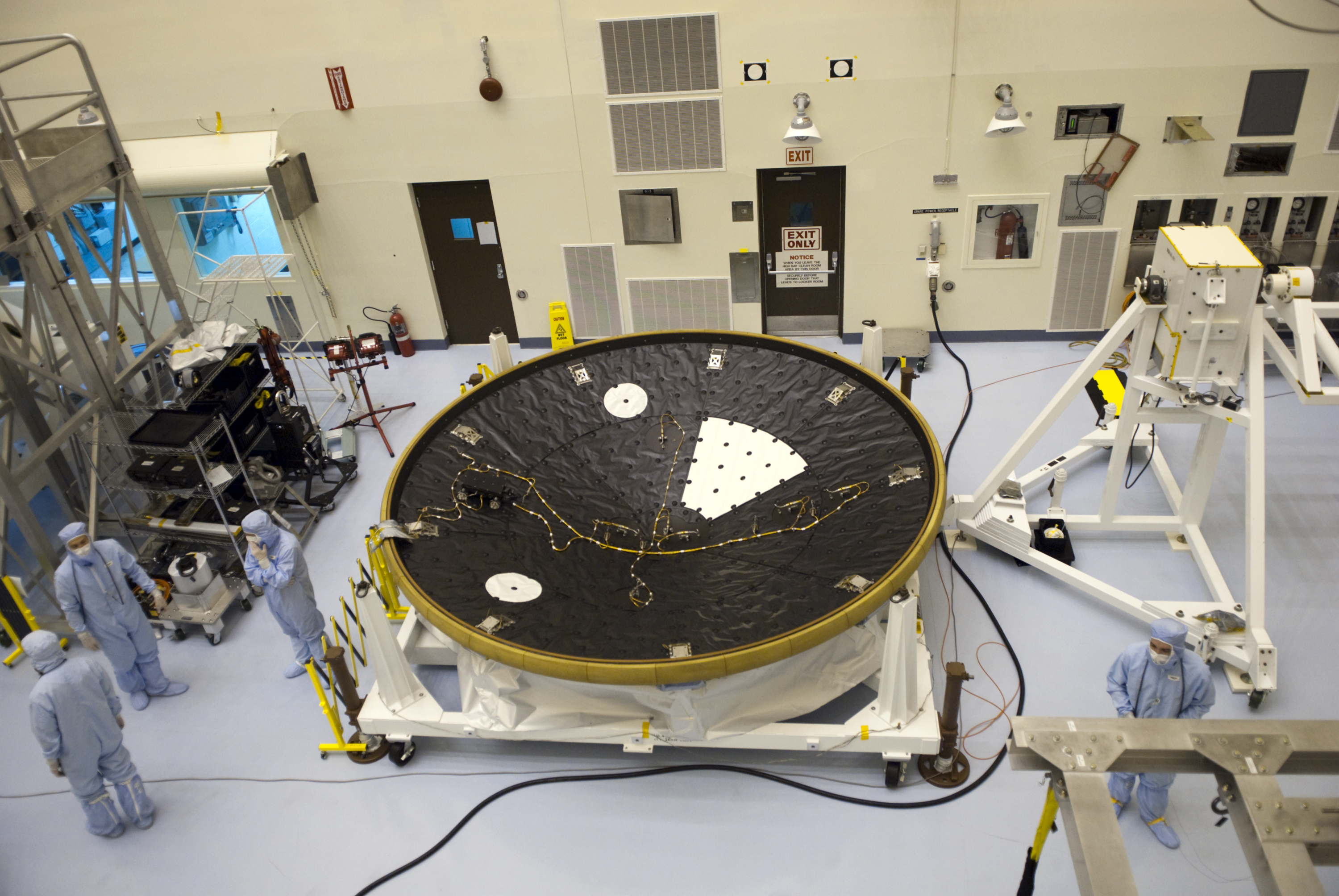
No cabe duda de que han echado el resto en sus sistemas visuales, pero hay otras curiosidades de Curiosity, y no solo en el propio vehículo. Existe un experimento que no está montado en el todoterreno, sino que va anclado en el interior del escudo de reentrada (que es el más grande fabricado hasta ahora). Se llama MEDLI, o instrumento de entrada, descenso y aterrizaje. Son un juego de sensores colocados por todo el escudo de reentrada que tomará datos ocho veces por segundo a partir de 10 minutos antes del contacto con la atmósfera hasta 4 minutos después de la apertura del paracaídas. Debido a que la masa del conjunto de reentrada, sin contar con la fase de crucero expulsada previamente, es de 2431 kg., al diámetro (4’5 metros) del escudo de reentrada, y a la velocidad de entrada, será el vehículo que sufra un mayor estrés durante el proceso de contacto con la atmósfera, así que se han montado esos sensores para tomar medidas acerca de las condiciones del escudo de reentrada durante todo el proceso, para ayudar a diseñar futuras misiones que tengan como destino la superficie marciana, ya sea una sonda automática, ya sea un módulo de descenso tripulado. Concretamente son 7 sensores de presión (MEADS, sistema de datos de la entrada atmosférica marciana) y siete enchufes con múltiples sensores de temperatura (MISP, enchufes de sensores integrados). Cada enchufe de sensores lleva termoacopladores para calcular la temperatura a distintas profundidades de las losetas de protección térmica del escudo, y además incluye un sensor que mide el ratio de desprendimiento del material del escudo de reentrada. Los sensores de presión proporcionarán mediciones para concretar un perfil de densidad y de los vientos atmosféricos, además de medir la presión a la que es sometido el escudo, así como calcular la velocidad y la orientación de la cápsula de descenso. Serán datos muy importantes.
con la atmósfera hasta 4 minutos después de la apertura del paracaídas. Debido a que la masa del conjunto de reentrada, sin contar con la fase de crucero expulsada previamente, es de 2431 kg., al diámetro (4’5 metros) del escudo de reentrada, y a la velocidad de entrada, será el vehículo que sufra un mayor estrés durante el proceso de contacto con la atmósfera, así que se han montado esos sensores para tomar medidas acerca de las condiciones del escudo de reentrada durante todo el proceso, para ayudar a diseñar futuras misiones que tengan como destino la superficie marciana, ya sea una sonda automática, ya sea un módulo de descenso tripulado. Concretamente son 7 sensores de presión (MEADS, sistema de datos de la entrada atmosférica marciana) y siete enchufes con múltiples sensores de temperatura (MISP, enchufes de sensores integrados). Cada enchufe de sensores lleva termoacopladores para calcular la temperatura a distintas profundidades de las losetas de protección térmica del escudo, y además incluye un sensor que mide el ratio de desprendimiento del material del escudo de reentrada. Los sensores de presión proporcionarán mediciones para concretar un perfil de densidad y de los vientos atmosféricos, además de medir la presión a la que es sometido el escudo, así como calcular la velocidad y la orientación de la cápsula de descenso. Serán datos muy importantes.
No cabe duda de que han echado el resto en sus sistemas visuales, pero hay otras curiosidades de Curiosity, y no solo en el propio vehículo. Existe un experimento que no está montado en el todoterreno, sino que va anclado en el interior del escudo de reentrada (que es el más grande fabricado hasta ahora). Se llama MEDLI, o instrumento de entrada, descenso y aterrizaje. Son un juego de sensores colocados por todo el escudo de reentrada que tomará datos ocho veces por segundo a partir de 10 minutos antes del contacto
 con la atmósfera hasta 4 minutos después de la apertura del paracaídas. Debido a que la masa del conjunto de reentrada, sin contar con la fase de crucero expulsada previamente, es de 2431 kg., al diámetro (4’5 metros) del escudo de reentrada, y a la velocidad de entrada, será el vehículo que sufra un mayor estrés durante el proceso de contacto con la atmósfera, así que se han montado esos sensores para tomar medidas acerca de las condiciones del escudo de reentrada durante todo el proceso, para ayudar a diseñar futuras misiones que tengan como destino la superficie marciana, ya sea una sonda automática, ya sea un módulo de descenso tripulado. Concretamente son 7 sensores de presión (MEADS, sistema de datos de la entrada atmosférica marciana) y siete enchufes con múltiples sensores de temperatura (MISP, enchufes de sensores integrados). Cada enchufe de sensores lleva termoacopladores para calcular la temperatura a distintas profundidades de las losetas de protección térmica del escudo, y además incluye un sensor que mide el ratio de desprendimiento del material del escudo de reentrada. Los sensores de presión proporcionarán mediciones para concretar un perfil de densidad y de los vientos atmosféricos, además de medir la presión a la que es sometido el escudo, así como calcular la velocidad y la orientación de la cápsula de descenso. Serán datos muy importantes.
con la atmósfera hasta 4 minutos después de la apertura del paracaídas. Debido a que la masa del conjunto de reentrada, sin contar con la fase de crucero expulsada previamente, es de 2431 kg., al diámetro (4’5 metros) del escudo de reentrada, y a la velocidad de entrada, será el vehículo que sufra un mayor estrés durante el proceso de contacto con la atmósfera, así que se han montado esos sensores para tomar medidas acerca de las condiciones del escudo de reentrada durante todo el proceso, para ayudar a diseñar futuras misiones que tengan como destino la superficie marciana, ya sea una sonda automática, ya sea un módulo de descenso tripulado. Concretamente son 7 sensores de presión (MEADS, sistema de datos de la entrada atmosférica marciana) y siete enchufes con múltiples sensores de temperatura (MISP, enchufes de sensores integrados). Cada enchufe de sensores lleva termoacopladores para calcular la temperatura a distintas profundidades de las losetas de protección térmica del escudo, y además incluye un sensor que mide el ratio de desprendimiento del material del escudo de reentrada. Los sensores de presión proporcionarán mediciones para concretar un perfil de densidad y de los vientos atmosféricos, además de medir la presión a la que es sometido el escudo, así como calcular la velocidad y la orientación de la cápsula de descenso. Serán datos muy importantes. Para comunicación con el centro de control a través de la Red de Espacio Profundo de la NASA, posee tres antenas. La primera es la de alta ganancia en banda-X, a través de una antena hexagonal y omnidireccional de 0’3 metros de diámetro, construida en España y situada en el lado izquierdo del vehículo. Se usará para enviar y recibir comandos a Curiosity, a velocidades de transmisión superiores a 800 bits por segundo. L a segunda, es la de baja ganancia, también en banda-X, solo para que Curiosity reciba comandos. Es una barra vertical sin movimiento, colocada detrás de la de alta ganancia. Y por último, el emisor-receptor Electra UHF, una evolución de las tradicionales antenas UHF, aunque más ligeras y con un mayor ratio de descarga. Es la segunda antena de este tipo que volará a Marte (la primera la lleva la MRO), y proporcionará un intercambio de información entre el todoterreno y las sondas en órbita, la Mars Odyssey, la MRO e incluso la Mars Express. Si bien la vía prioritaria es la antena de alta ganancia, la UHF transmitirá a una velocidad mucho mayor la información a sus compañeras orbitales para que éstas las transmitan al centro de control, también con una velocidad de transmisión mucho mayor.
a segunda, es la de baja ganancia, también en banda-X, solo para que Curiosity reciba comandos. Es una barra vertical sin movimiento, colocada detrás de la de alta ganancia. Y por último, el emisor-receptor Electra UHF, una evolución de las tradicionales antenas UHF, aunque más ligeras y con un mayor ratio de descarga. Es la segunda antena de este tipo que volará a Marte (la primera la lleva la MRO), y proporcionará un intercambio de información entre el todoterreno y las sondas en órbita, la Mars Odyssey, la MRO e incluso la Mars Express. Si bien la vía prioritaria es la antena de alta ganancia, la UHF transmitirá a una velocidad mucho mayor la información a sus compañeras orbitales para que éstas las transmitan al centro de control, también con una velocidad de transmisión mucho mayor.
 a segunda, es la de baja ganancia, también en banda-X, solo para que Curiosity reciba comandos. Es una barra vertical sin movimiento, colocada detrás de la de alta ganancia. Y por último, el emisor-receptor Electra UHF, una evolución de las tradicionales antenas UHF, aunque más ligeras y con un mayor ratio de descarga. Es la segunda antena de este tipo que volará a Marte (la primera la lleva la MRO), y proporcionará un intercambio de información entre el todoterreno y las sondas en órbita, la Mars Odyssey, la MRO e incluso la Mars Express. Si bien la vía prioritaria es la antena de alta ganancia, la UHF transmitirá a una velocidad mucho mayor la información a sus compañeras orbitales para que éstas las transmitan al centro de control, también con una velocidad de transmisión mucho mayor.
a segunda, es la de baja ganancia, también en banda-X, solo para que Curiosity reciba comandos. Es una barra vertical sin movimiento, colocada detrás de la de alta ganancia. Y por último, el emisor-receptor Electra UHF, una evolución de las tradicionales antenas UHF, aunque más ligeras y con un mayor ratio de descarga. Es la segunda antena de este tipo que volará a Marte (la primera la lleva la MRO), y proporcionará un intercambio de información entre el todoterreno y las sondas en órbita, la Mars Odyssey, la MRO e incluso la Mars Express. Si bien la vía prioritaria es la antena de alta ganancia, la UHF transmitirá a una velocidad mucho mayor la información a sus compañeras orbitales para que éstas las transmitan al centro de control, también con una velocidad de transmisión mucho mayor. La mayor diferencia entre los tres tipos de vehículos autopropulsados construidos por la NASA,  es en el sistema térmico. Mientras que el Sojourner y los MER llevan unos calentadores internos que utilizan ridículas cantidades de material radioactivo y mantas térmicas, Curiosity equipa un sistema tremendamente eficaz, tanto, que no equipa esas mantas. Esta ha sido una de las razones por la cual el lugar de aterrizaje no se ha elegido por los rigores climáticos del planeta, sino por el del máximo interés científico. Una red de tuberías de unos 60 metros recorren hasta el más mínimo rincón del interior del todoterreno. Por esas tuberías circula un fluido, que curiosamente es calentado por el calor emitido por el MMRTG, y también posee la cualidad de eliminar el exceso de calor interno. Unas pequeñas chimeneas eliminan el exceso de calor que emite el MMRTG cuando no es necesario para calentar las electrónicas de la sonda. Como sistema de reserva, también posee calentadores eléctricos.
es en el sistema térmico. Mientras que el Sojourner y los MER llevan unos calentadores internos que utilizan ridículas cantidades de material radioactivo y mantas térmicas, Curiosity equipa un sistema tremendamente eficaz, tanto, que no equipa esas mantas. Esta ha sido una de las razones por la cual el lugar de aterrizaje no se ha elegido por los rigores climáticos del planeta, sino por el del máximo interés científico. Una red de tuberías de unos 60 metros recorren hasta el más mínimo rincón del interior del todoterreno. Por esas tuberías circula un fluido, que curiosamente es calentado por el calor emitido por el MMRTG, y también posee la cualidad de eliminar el exceso de calor interno. Unas pequeñas chimeneas eliminan el exceso de calor que emite el MMRTG cuando no es necesario para calentar las electrónicas de la sonda. Como sistema de reserva, también posee calentadores eléctricos.
 es en el sistema térmico. Mientras que el Sojourner y los MER llevan unos calentadores internos que utilizan ridículas cantidades de material radioactivo y mantas térmicas, Curiosity equipa un sistema tremendamente eficaz, tanto, que no equipa esas mantas. Esta ha sido una de las razones por la cual el lugar de aterrizaje no se ha elegido por los rigores climáticos del planeta, sino por el del máximo interés científico. Una red de tuberías de unos 60 metros recorren hasta el más mínimo rincón del interior del todoterreno. Por esas tuberías circula un fluido, que curiosamente es calentado por el calor emitido por el MMRTG, y también posee la cualidad de eliminar el exceso de calor interno. Unas pequeñas chimeneas eliminan el exceso de calor que emite el MMRTG cuando no es necesario para calentar las electrónicas de la sonda. Como sistema de reserva, también posee calentadores eléctricos.
es en el sistema térmico. Mientras que el Sojourner y los MER llevan unos calentadores internos que utilizan ridículas cantidades de material radioactivo y mantas térmicas, Curiosity equipa un sistema tremendamente eficaz, tanto, que no equipa esas mantas. Esta ha sido una de las razones por la cual el lugar de aterrizaje no se ha elegido por los rigores climáticos del planeta, sino por el del máximo interés científico. Una red de tuberías de unos 60 metros recorren hasta el más mínimo rincón del interior del todoterreno. Por esas tuberías circula un fluido, que curiosamente es calentado por el calor emitido por el MMRTG, y también posee la cualidad de eliminar el exceso de calor interno. Unas pequeñas chimeneas eliminan el exceso de calor que emite el MMRTG cuando no es necesario para calentar las electrónicas de la sonda. Como sistema de reserva, también posee calentadores eléctricos. Las coordenadas de aterrizaje de Curiosity en Marte son las siguientes: 4’5º S, 222ª W, en el lado noreste del suelo del cráter Gale, de 154 km. de diámetro. La razón por la cual se ha elegido esta zona es por el máximo interés científico. Posee un pico central estratificado, además de tener minerales que parece que se han desarrollado en lugares húmedos. La elipse de amartizaje es reducida, de 20 x 25 km., a diferencia de las de las anteriores sondas. Todo esto es por el sistema de guiado, heredado de los transbordadores y las cápsulas Apollo. Un algoritmo de guiado de entrada calcula el posible error en distancia respecto a la elipse de aterrizaje y corregirlo sobre la marcha. El diseño de la aerovaina es similar al de las cápsulas Apollo, y para mantener el rumbo durante el conta
lado noreste del suelo del cráter Gale, de 154 km. de diámetro. La razón por la cual se ha elegido esta zona es por el máximo interés científico. Posee un pico central estratificado, además de tener minerales que parece que se han desarrollado en lugares húmedos. La elipse de amartizaje es reducida, de 20 x 25 km., a diferencia de las de las anteriores sondas. Todo esto es por el sistema de guiado, heredado de los transbordadores y las cápsulas Apollo. Un algoritmo de guiado de entrada calcula el posible error en distancia respecto a la elipse de aterrizaje y corregirlo sobre la marcha. El diseño de la aerovaina es similar al de las cápsulas Apollo, y para mantener el rumbo durante el conta cto con la atmósfera posee cuatro grupos de propulsores del sistema de control de reacción. Este sistema permite variar la rotación y el rumbo, para una mayor exactitud en el proceso final de amartizaje. Varios equilibradores de masa colocados en las esquinas de la aerovaina permiten ayudar a los propulsores, para posteriormente ser expulsados antes de la extensión del paracaídas.
cto con la atmósfera posee cuatro grupos de propulsores del sistema de control de reacción. Este sistema permite variar la rotación y el rumbo, para una mayor exactitud en el proceso final de amartizaje. Varios equilibradores de masa colocados en las esquinas de la aerovaina permiten ayudar a los propulsores, para posteriormente ser expulsados antes de la extensión del paracaídas.
 lado noreste del suelo del cráter Gale, de 154 km. de diámetro. La razón por la cual se ha elegido esta zona es por el máximo interés científico. Posee un pico central estratificado, además de tener minerales que parece que se han desarrollado en lugares húmedos. La elipse de amartizaje es reducida, de 20 x 25 km., a diferencia de las de las anteriores sondas. Todo esto es por el sistema de guiado, heredado de los transbordadores y las cápsulas Apollo. Un algoritmo de guiado de entrada calcula el posible error en distancia respecto a la elipse de aterrizaje y corregirlo sobre la marcha. El diseño de la aerovaina es similar al de las cápsulas Apollo, y para mantener el rumbo durante el conta
lado noreste del suelo del cráter Gale, de 154 km. de diámetro. La razón por la cual se ha elegido esta zona es por el máximo interés científico. Posee un pico central estratificado, además de tener minerales que parece que se han desarrollado en lugares húmedos. La elipse de amartizaje es reducida, de 20 x 25 km., a diferencia de las de las anteriores sondas. Todo esto es por el sistema de guiado, heredado de los transbordadores y las cápsulas Apollo. Un algoritmo de guiado de entrada calcula el posible error en distancia respecto a la elipse de aterrizaje y corregirlo sobre la marcha. El diseño de la aerovaina es similar al de las cápsulas Apollo, y para mantener el rumbo durante el conta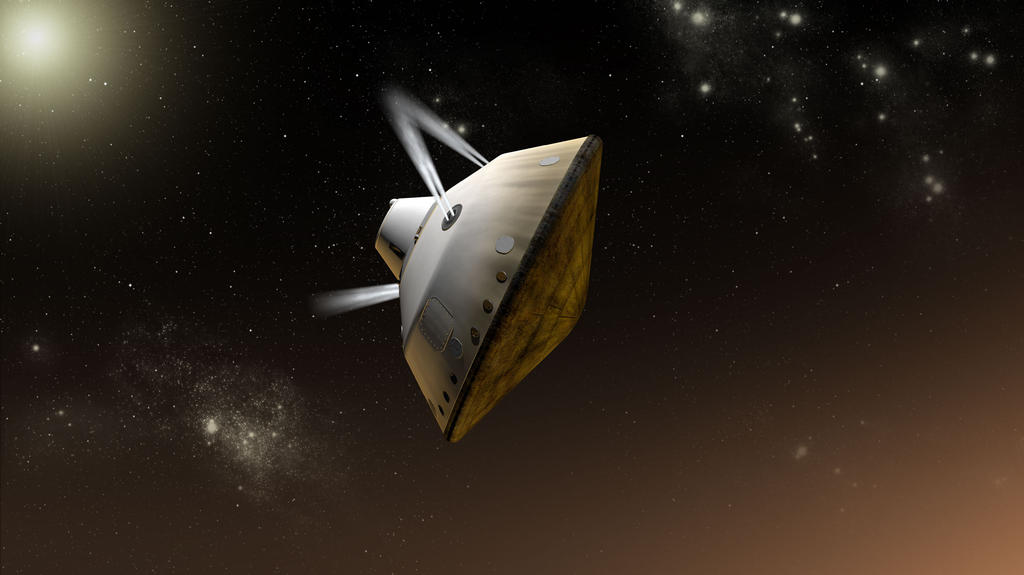 cto con la atmósfera posee cuatro grupos de propulsores del sistema de control de reacción. Este sistema permite variar la rotación y el rumbo, para una mayor exactitud en el proceso final de amartizaje. Varios equilibradores de masa colocados en las esquinas de la aerovaina permiten ayudar a los propulsores, para posteriormente ser expulsados antes de la extensión del paracaídas.
cto con la atmósfera posee cuatro grupos de propulsores del sistema de control de reacción. Este sistema permite variar la rotación y el rumbo, para una mayor exactitud en el proceso final de amartizaje. Varios equilibradores de masa colocados en las esquinas de la aerovaina permiten ayudar a los propulsores, para posteriormente ser expulsados antes de la extensión del paracaídas. Sin embargo, hay dos razones más que la NASA no ha… reconocido. Una de ellas, según las malas lenguas, es que, debido al retraso del desarrollo del vehículo, y para enganchar a la gente, se ha buscado un lugar espectacular para que su desarrollado sistema de visión pueda proporcionarnos imágenes impactantes para así captar los máximos seguidores para la misión. Y la tercera de ellas tiene que ver con Opportunity. Os preguntaréis: ¿Qué tiene que ver el único MER funcional en la misión de Curiosity? Os lo diremos: Tenemos a Opportunity en Terra Meridiani, Spirit estaba en el otro lado del planeta, en el cráter Gusev, y ahora que su misión está terminada oficialmente, la sala que ocupaba el equipo científico de Spirit lo está por los de Curiosity, y no solo eso, ya que si se hubiera elegido un lugar de aterrizaje cercano al de Opportunity, el trabajo de ambos todoterrenos se molestaría, en cuestión de prioridad en el envío de comandos. Por ello, el cráter Gale se sitúa varios cientos de kilómetros al oeste de Gusev. Así, se volverá a tener funcionando en puntos opuestos de la superficie marciana dos todoterrenos. Nadie pensaba que los MER duraran tanto, ni siquiera que sus misiones coincidirían en tiempo con la de Curiosity, algo que, como sigamos así, ocurrirá a partir del 6 de agosto del 2012, cuando Opportunity, el Mariscal de Marte, lleve nada menos que 8 años y seis meses.
Y por último, un vídeo espectacular sobre cómo será la misión. Nos toca disfrutar.
No hay comentarios:
Publicar un comentario