
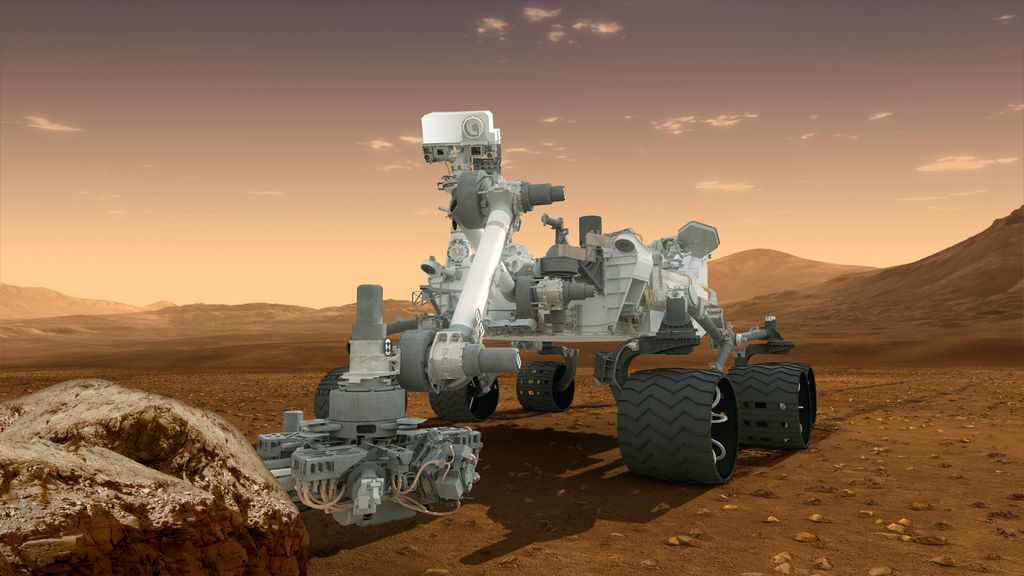
Pero bueno, ¿todavía quedan cosas que contar de Curiosity? ¿No ha sido bastante con las dos entradas anteriores? Pues la verdad es que no, todavía quedan cosillas por relatar, y creemos que es el momento para hablar de estos últimos componentes, básicos para el cumplimiento de la misión. Y además, no está de más hablar de lo que podrá hacer tras tocar la superficie del cráter Gale.
 Al igual que los dos MER, en Curiosity se ha montado un brazo en cuyo final se han montado varios instrumentos científicos y herramientas. Mientras que en Opportunity, el único todoterreno funcional que todavía anda por la superficie marciana, posee una micro cámara, dos espectrómetros y una herramienta para rascar rocas, el gran Mars Science Laboratory incorpora una micro cámara a color (MAHLI, que ya obtuvo tomas durante el viaje de crucero) y un espectrómetro (APXS), junto con tres herramientas para la preparación, adquisición y procesado de las muestras de las rocas. Estos cinco elementos están situados en la torreta, que es como se llama la plataforma sobre la que se han colocado. Las tres herramientas conforman el llamado subsistema de adquisición, manejo y procesado de muestras, o SA/SPaH. El principal es el PADS, sistema de taladro de adquisición y rotura, que es un taladro percutor que perfora la roca adquiriendo una muestra de 5 centímetros de largo y de hasta 1.6 de diámetro. A la vez que va perforando, el taladro va pulverizando la muestra, hasta un tamaño admisible para que los instrumentos analíticos SAM y CheMin puedan estudiarlos en detalle. Esta muestra acaba en un pequeño compartimento dentro del taladro para llevarlo a otra de las herramientas. Si la primera broca acaba atascada, el sistema es capaz de desengancharla, para sustituirla
Al igual que los dos MER, en Curiosity se ha montado un brazo en cuyo final se han montado varios instrumentos científicos y herramientas. Mientras que en Opportunity, el único todoterreno funcional que todavía anda por la superficie marciana, posee una micro cámara, dos espectrómetros y una herramienta para rascar rocas, el gran Mars Science Laboratory incorpora una micro cámara a color (MAHLI, que ya obtuvo tomas durante el viaje de crucero) y un espectrómetro (APXS), junto con tres herramientas para la preparación, adquisición y procesado de las muestras de las rocas. Estos cinco elementos están situados en la torreta, que es como se llama la plataforma sobre la que se han colocado. Las tres herramientas conforman el llamado subsistema de adquisición, manejo y procesado de muestras, o SA/SPaH. El principal es el PADS, sistema de taladro de adquisición y rotura, que es un taladro percutor que perfora la roca adquiriendo una muestra de 5 centímetros de largo y de hasta 1.6 de diámetro. A la vez que va perforando, el taladro va pulverizando la muestra, hasta un tamaño admisible para que los instrumentos analíticos SAM y CheMin puedan estudiarlos en detalle. Esta muestra acaba en un pequeño compartimento dentro del taladro para llevarlo a otra de las herramientas. Si la primera broca acaba atascada, el sistema es capaz de desengancharla, para sustituirla 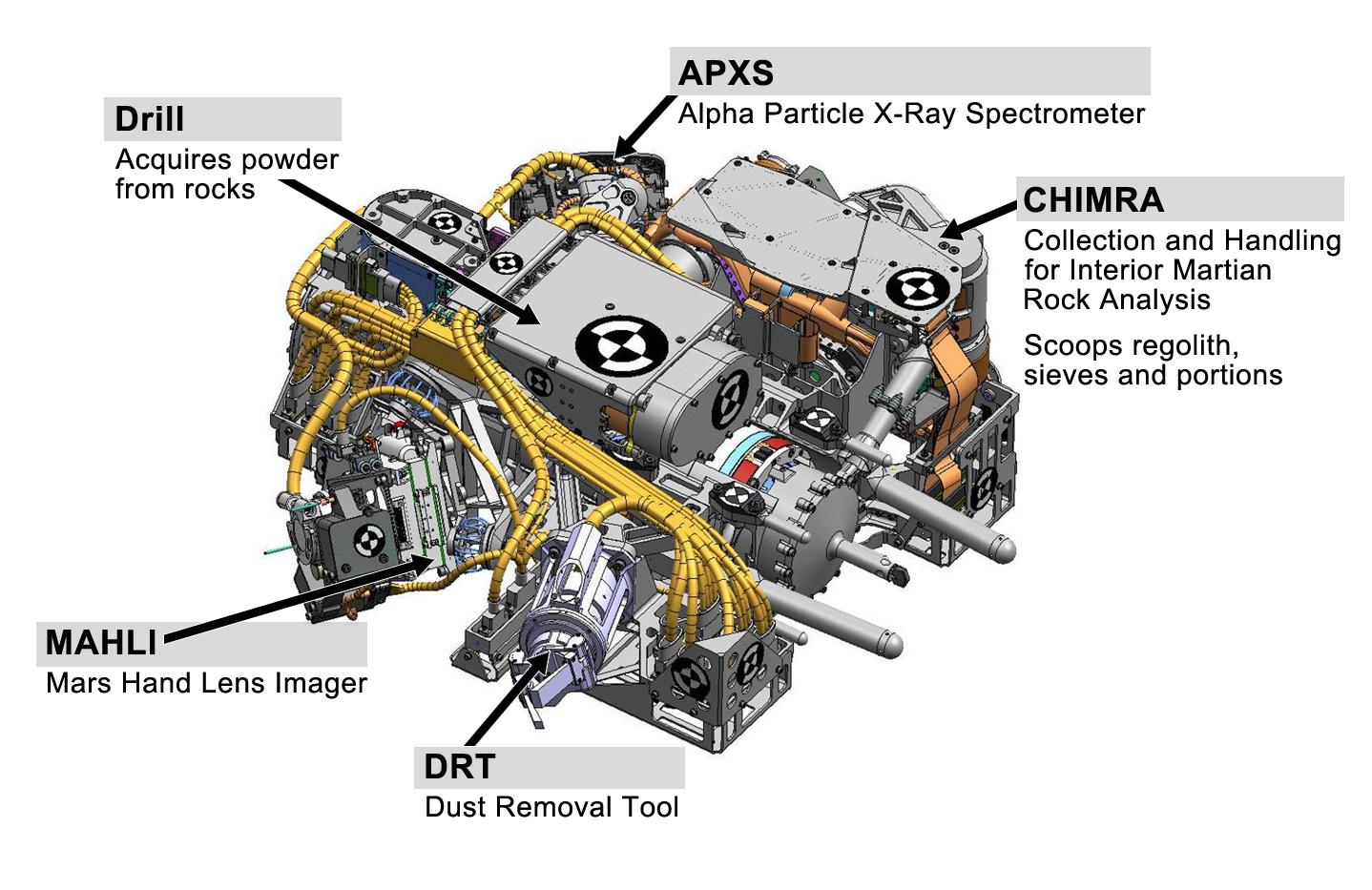
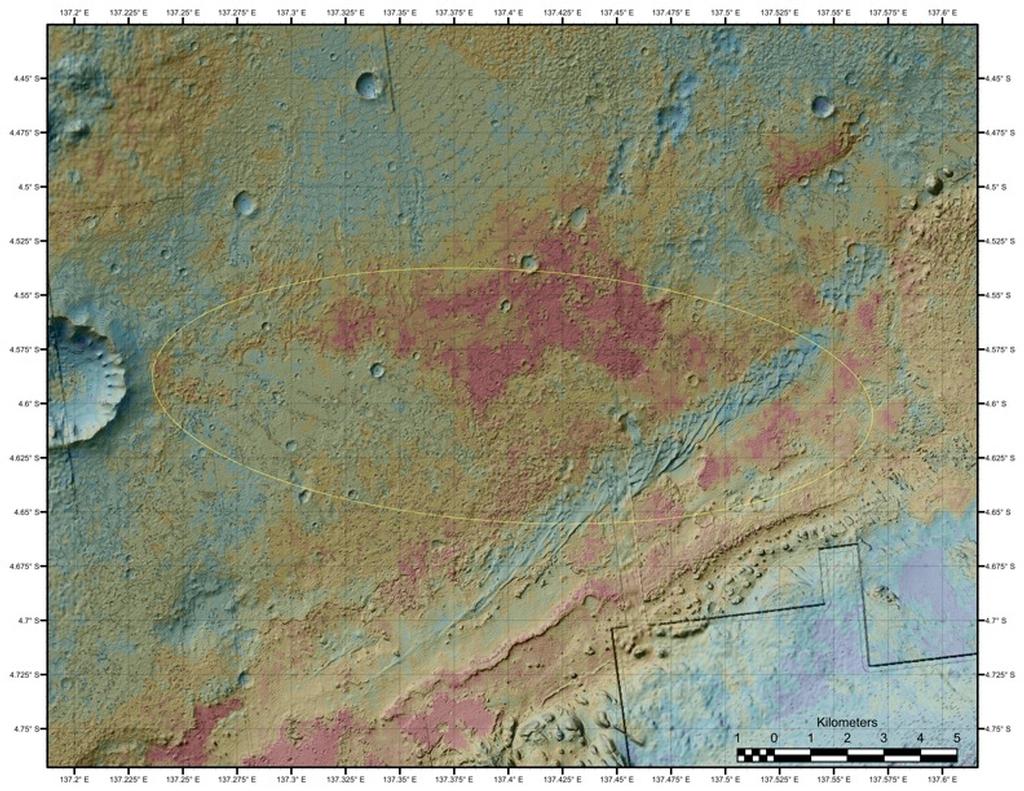
Antes de comenzar su misión, lo primero que tiene que hacer es llegar a la superficie. Desde el lanzamiento hasta la llegada a Marte habrán transcurrido 254 días. Ha realizado varias maniobras para situarse en la posición apropiada para la entrada en la atmósfera del planeta, y ha probado su instrumental. Uno de sus aparatos, el medidor de radiación RAD lleva tomando lecturas desde que el conjunto fue colocado en el espacio. Todo el proceso llamado fase de entrada, descenso y aterrizaje se espera que pueda durar en total unos siete minutos, en el que tendrá que realizar maniobras muy completas y nunca probadas anteriormente, buscando sobre todo una precisión inédita en cuanto al aterrizaje en su elipse prevista, que según parece puede reducirse a una de 7 x 20 km. sobre el lado noroeste del suelo del cráter Gale.
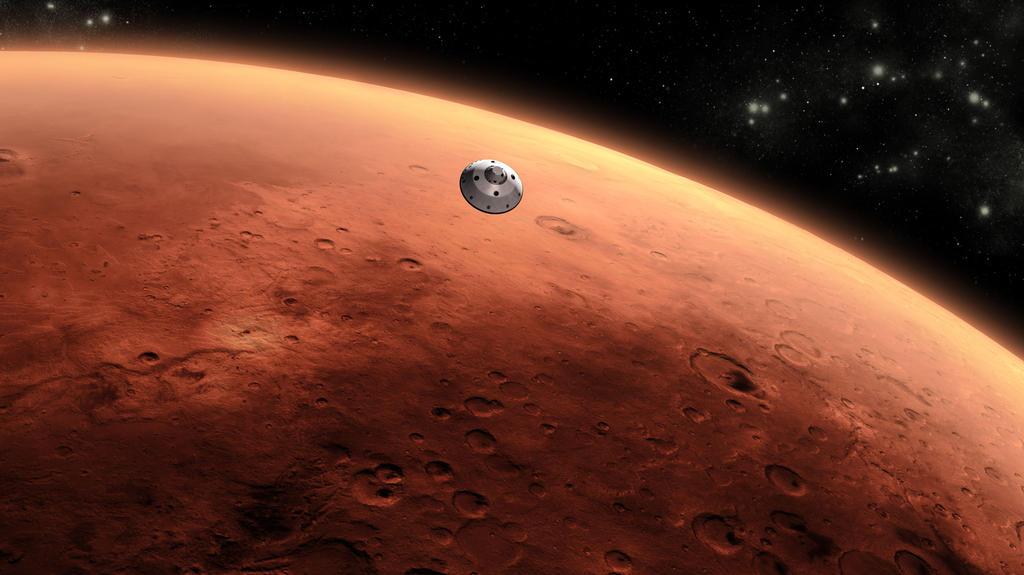
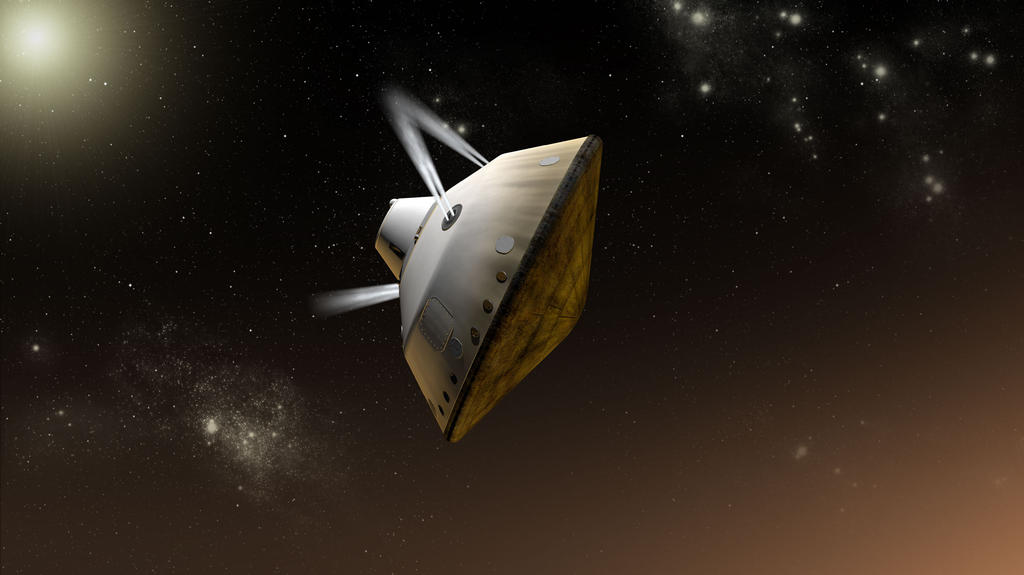
El proceso completo comprende nada menos que seis configuraciones diferentes, y disparará hasta 76 dispositivos pirotécnicos. El día 6 de agosto la suerte estará echada. Lo primero de todo el proceso es separar la fase de crucero, que le ha servido como medio de propulsión, generación de energía y enlace de comunicaciones con el centro de control. A partir de ese momento, el vehículo obtiene su energía directamente de su MMRTG, y comienza a contactar a través de la antena de baja ganancia situada en la parte superior del contenedor del paracaídas. Usando los propulsores situados en la propia aerovaina, el conjunto de entrada orientará el escudo en la dirección de llegada, para ofrecerlo hacia la atmósfera, a la vez que detiene la rotación de 2 rpm. El instrumento MEDLI se activará 10 minutos antes del contacto con las capas altas de la atmósfera. Una vez situado en posición, dos masas de tungsteno (que pesan cada una 75 kg.) serán expulsadas, todo para desplazar el centro de gravedad del eje central para ofrecer una mayor superficie de contacto con la atmósfera, y así generar lo que se ha llamado “elevación”, es decir, un efecto aerodinámico que provoca que el conjunto de entrada vuele a través de la atmósfera, en vez de atravesarla directamente. Así, contactará con la atmósfera marciana a 131 km. por encima de la superficie, y a 630 km. del lugar previsto de amartizaje. En ese momento, los propulsores principales de la aerovaina se empiezan a disparar para, ayudando a esta “elevación”, podrá corregir cualquier desviación para una llegada más precisa al punto escogido. De esta manera, con los encendidos de estos propulsores conseguirá manipular el ángulo y la dirección de la “elevación”, a la vez que realiza maniobras en forma de S, diseñadas para corregir las desviaciones provocadas por las condiciones atmosféricas. Todo esto (llamada entrada guiada) lo gestiona autónomamente el ordenador de Curiosity, vía unidad de medición inercial. Prácticamente, la inmensa mayoría de la velocidad que poseía se perderá durante esta maniobra. A lo largo del cruce de la atmósfera, se espera un pico de temperatura de 2.100º C, y una deceleración máxima de hasta 15 G. Cuando la maniobra de entrada guiada finaliza, y la atmósfera es superada, comienza a prepararse para las últimas fases. Lo primero, expulsar seis nuevas masas de tungsteno de 25 kg. cada una para volver a colocar el centro de gravedad en el eje central, para después desplegar el paracaídas. Éste, de 16 metros de diámetro, se desplegará a 11 km. sobre la superficie. A su vez, la antena UHF situada en el contenedor del paracaídas comenzará a emitir datos de ingeniería hacia los orbitadores, para que éstos lo retransmitan a la Tierra. 24 segundos después del completo despliegue del paracaídas, el escudo de reentrada se expulsa, activando a la vez la cámara MARDI, cuya primera tarea es equilibrar los balances de blanco usando un pequeño objetivo situado dentro del propio escudo. En ese momento comienza a adquirir secuencias para la posterior construcción de un vídeo del descenso. Además, el radar de altitud comienza a trabajar para informar de la distancia al suelo. 85 segundos después de expulsar el escudo, Curiosity, con su “mochila cohete”, se separa de la aerovaina, y los motores acelerables (del mismo tipo que los usados por las Viking Lander) se ponen en marcha, a una altitud de 1.6 km., y poniendo en marcha una antena UHF para tomar el relevo de la de la aerovaina. Tras conseguir una velocidad de descenso estable de 0.75 m/s., continúa descendiendo, hasta que los elementos del Sky Crane se preparan. Posee de dos carretes, uno que posee un cable de datos entre la mochila cohete y el todoterreno, y otro con tres cables de unión, con capacidad de descender a Curiosity hasta siete metros del conjunto. Un pequeño elemento permite descender ambos sistemas a la vez, para equilibrar por completo este proceso. Justo antes de bajar el todoterreno, cuatro de los ocho motores de la mochila cohete serán apagados, para que con su chorro no dañe al vehículo. Entonces, a 20 metros del suelo, el Sky Crane desciende a Curiosity, provocando a su vez la extensión del sistema de suspensión y las ruedas, que actúan también como tren de aterrizaje. Cuando los sensores a bordo del todoterreno sienten completo contacto, los cables se cortan, y el sistema de descenso propulsado se aleja de Curiosity, cayendo a unos 150 metros de distancia. Ya antes, la antena UHF Electra del propio vehículo comenzó a trabajar cuando fue descendido, sustituyendo a la de la mochila propulsora. Entonces, cuando ya está en la misma superficie, emitirá la señal de que ha llegado sin novedad a la superficie.
maniobra. A lo largo del cruce de la atmósfera, se espera un pico de temperatura de 2.100º C, y una deceleración máxima de hasta 15 G. Cuando la maniobra de entrada guiada finaliza, y la atmósfera es superada, comienza a prepararse para las últimas fases. Lo primero, expulsar seis nuevas masas de tungsteno de 25 kg. cada una para volver a colocar el centro de gravedad en el eje central, para después desplegar el paracaídas. Éste, de 16 metros de diámetro, se desplegará a 11 km. sobre la superficie. A su vez, la antena UHF situada en el contenedor del paracaídas comenzará a emitir datos de ingeniería hacia los orbitadores, para que éstos lo retransmitan a la Tierra. 24 segundos después del completo despliegue del paracaídas, el escudo de reentrada se expulsa, activando a la vez la cámara MARDI, cuya primera tarea es equilibrar los balances de blanco usando un pequeño objetivo situado dentro del propio escudo. En ese momento comienza a adquirir secuencias para la posterior construcción de un vídeo del descenso. Además, el radar de altitud comienza a trabajar para informar de la distancia al suelo. 85 segundos después de expulsar el escudo, Curiosity, con su “mochila cohete”, se separa de la aerovaina, y los motores acelerables (del mismo tipo que los usados por las Viking Lander) se ponen en marcha, a una altitud de 1.6 km., y poniendo en marcha una antena UHF para tomar el relevo de la de la aerovaina. Tras conseguir una velocidad de descenso estable de 0.75 m/s., continúa descendiendo, hasta que los elementos del Sky Crane se preparan. Posee de dos carretes, uno que posee un cable de datos entre la mochila cohete y el todoterreno, y otro con tres cables de unión, con capacidad de descender a Curiosity hasta siete metros del conjunto. Un pequeño elemento permite descender ambos sistemas a la vez, para equilibrar por completo este proceso. Justo antes de bajar el todoterreno, cuatro de los ocho motores de la mochila cohete serán apagados, para que con su chorro no dañe al vehículo. Entonces, a 20 metros del suelo, el Sky Crane desciende a Curiosity, provocando a su vez la extensión del sistema de suspensión y las ruedas, que actúan también como tren de aterrizaje. Cuando los sensores a bordo del todoterreno sienten completo contacto, los cables se cortan, y el sistema de descenso propulsado se aleja de Curiosity, cayendo a unos 150 metros de distancia. Ya antes, la antena UHF Electra del propio vehículo comenzó a trabajar cuando fue descendido, sustituyendo a la de la mochila propulsora. Entonces, cuando ya está en la misma superficie, emitirá la señal de que ha llegado sin novedad a la superficie.
 maniobra. A lo largo del cruce de la atmósfera, se espera un pico de temperatura de 2.100º C, y una deceleración máxima de hasta 15 G. Cuando la maniobra de entrada guiada finaliza, y la atmósfera es superada, comienza a prepararse para las últimas fases. Lo primero, expulsar seis nuevas masas de tungsteno de 25 kg. cada una para volver a colocar el centro de gravedad en el eje central, para después desplegar el paracaídas. Éste, de 16 metros de diámetro, se desplegará a 11 km. sobre la superficie. A su vez, la antena UHF situada en el contenedor del paracaídas comenzará a emitir datos de ingeniería hacia los orbitadores, para que éstos lo retransmitan a la Tierra. 24 segundos después del completo despliegue del paracaídas, el escudo de reentrada se expulsa, activando a la vez la cámara MARDI, cuya primera tarea es equilibrar los balances de blanco usando un pequeño objetivo situado dentro del propio escudo. En ese momento comienza a adquirir secuencias para la posterior construcción de un vídeo del descenso. Además, el radar de altitud comienza a trabajar para informar de la distancia al suelo. 85 segundos después de expulsar el escudo, Curiosity, con su “mochila cohete”, se separa de la aerovaina, y los motores acelerables (del mismo tipo que los usados por las Viking Lander) se ponen en marcha, a una altitud de 1.6 km., y poniendo en marcha una antena UHF para tomar el relevo de la de la aerovaina. Tras conseguir una velocidad de descenso estable de 0.75 m/s., continúa descendiendo, hasta que los elementos del Sky Crane se preparan. Posee de dos carretes, uno que posee un cable de datos entre la mochila cohete y el todoterreno, y otro con tres cables de unión, con capacidad de descender a Curiosity hasta siete metros del conjunto. Un pequeño elemento permite descender ambos sistemas a la vez, para equilibrar por completo este proceso. Justo antes de bajar el todoterreno, cuatro de los ocho motores de la mochila cohete serán apagados, para que con su chorro no dañe al vehículo. Entonces, a 20 metros del suelo, el Sky Crane desciende a Curiosity, provocando a su vez la extensión del sistema de suspensión y las ruedas, que actúan también como tren de aterrizaje. Cuando los sensores a bordo del todoterreno sienten completo contacto, los cables se cortan, y el sistema de descenso propulsado se aleja de Curiosity, cayendo a unos 150 metros de distancia. Ya antes, la antena UHF Electra del propio vehículo comenzó a trabajar cuando fue descendido, sustituyendo a la de la mochila propulsora. Entonces, cuando ya está en la misma superficie, emitirá la señal de que ha llegado sin novedad a la superficie.
maniobra. A lo largo del cruce de la atmósfera, se espera un pico de temperatura de 2.100º C, y una deceleración máxima de hasta 15 G. Cuando la maniobra de entrada guiada finaliza, y la atmósfera es superada, comienza a prepararse para las últimas fases. Lo primero, expulsar seis nuevas masas de tungsteno de 25 kg. cada una para volver a colocar el centro de gravedad en el eje central, para después desplegar el paracaídas. Éste, de 16 metros de diámetro, se desplegará a 11 km. sobre la superficie. A su vez, la antena UHF situada en el contenedor del paracaídas comenzará a emitir datos de ingeniería hacia los orbitadores, para que éstos lo retransmitan a la Tierra. 24 segundos después del completo despliegue del paracaídas, el escudo de reentrada se expulsa, activando a la vez la cámara MARDI, cuya primera tarea es equilibrar los balances de blanco usando un pequeño objetivo situado dentro del propio escudo. En ese momento comienza a adquirir secuencias para la posterior construcción de un vídeo del descenso. Además, el radar de altitud comienza a trabajar para informar de la distancia al suelo. 85 segundos después de expulsar el escudo, Curiosity, con su “mochila cohete”, se separa de la aerovaina, y los motores acelerables (del mismo tipo que los usados por las Viking Lander) se ponen en marcha, a una altitud de 1.6 km., y poniendo en marcha una antena UHF para tomar el relevo de la de la aerovaina. Tras conseguir una velocidad de descenso estable de 0.75 m/s., continúa descendiendo, hasta que los elementos del Sky Crane se preparan. Posee de dos carretes, uno que posee un cable de datos entre la mochila cohete y el todoterreno, y otro con tres cables de unión, con capacidad de descender a Curiosity hasta siete metros del conjunto. Un pequeño elemento permite descender ambos sistemas a la vez, para equilibrar por completo este proceso. Justo antes de bajar el todoterreno, cuatro de los ocho motores de la mochila cohete serán apagados, para que con su chorro no dañe al vehículo. Entonces, a 20 metros del suelo, el Sky Crane desciende a Curiosity, provocando a su vez la extensión del sistema de suspensión y las ruedas, que actúan también como tren de aterrizaje. Cuando los sensores a bordo del todoterreno sienten completo contacto, los cables se cortan, y el sistema de descenso propulsado se aleja de Curiosity, cayendo a unos 150 metros de distancia. Ya antes, la antena UHF Electra del propio vehículo comenzó a trabajar cuando fue descendido, sustituyendo a la de la mochila propulsora. Entonces, cuando ya está en la misma superficie, emitirá la señal de que ha llegado sin novedad a la superficie.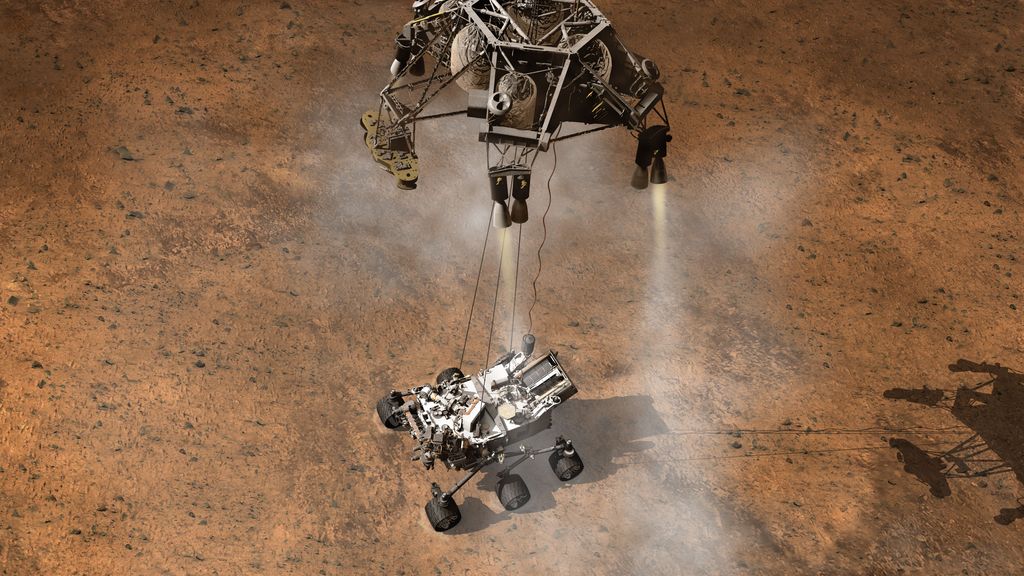
El día de llegada se ha designado como Sol 0, y serán aproximadamente las 3 de la tarde, hora en el cráter Gale. Después de estar ya libre, el ordenador cambia a modo de superficie, y realiza un completo análisis de salud a todos los sistemas, a la vez que comprobará su inclinación. Los dispositivos pirotécnicos se dispararán, y dejarán listos de despliegue los elementos móviles, además de las tapas transparentes de las Hazcam, que serán las primeras en adquirir imágenes del lugar de aterrizaje, tanto antes como después de la separación de las tapas protectoras. Es probable, aunque poco posible, que esas imágenes lleguen el primer día de misión al centro de control mediante los enlaces con la MRO o Mars Odyssey. Estas primeras imágenes están previstas que lleguen a la vez que algunas de las secuencias tomadas por MARDI a lo largo del descenso. En el Sol 1, la actividad principal (ya preprogramada antes del lanzamiento) es probar los movimientos de la antena de alta ganancia, que será el método principal de envío de comandos a Curiosity. También se esperan las primeras imágenes a color desde la misma superficie, tomadas por MAHLI desde su posición en la torreta, plegada en el frontal del vehículo, probando las capacidades de su motor de enfoque, ofreciéndonos una vista lateral del rover y de la misma superficie. Además, los instrumentos RAD y REMS comenzarán a adquirir lecturas, para comprobar su funcionamiento y observar por primera vez las condiciones del tiempo en la zona. El día importante es el Sol 2 ya que, si todo ha ido bien en los anteriores, se procederá a desplegar el mástil con las cámaras. La primera tarea compete a las cámaras de navegación, que serán apuntadas al cielo para buscar el Sol, y con la información recogida, apuntar la antena de alta ganancia hacia la Tierra. Posteriormente, las Mastcam serán calibradas usando los objetivos en el vehículo, para después tomar sus primeras imágenes del suelo de la zona. El primer panorama podrá realizarse en los días siguientes. Dependiendo de las prioridades en los primeros días, el vídeo completo de MARDI podrá llegar antes de los primeros movimientos. A lo largo de los primeros Soles se comprobará el correcto funcionamiento de todos los sistemas de a bordo, y después de verificar su correcto estado (y sobre todo tras determinar cuál es el camino más apropiado visto con las imágenes), Curiosity podrá dar sus primeros pasos, más de una semana después de la llegada. Obviamente, dependiendo del lugar de aterrizaje y de los objetivos hacia los que sea dirigido, la duración de los movimientos podría ser incluso mayor que el de Opportunity. Se espera que, tras completar su misión principal de 687 días, y contando con las paradas, investigaciones y problemas inesperados, haya recorrido hasta 20 km. por la zona de aterrizaje.
Al igual que Opportunity, la estrategia de comunicaciones será la siguiente: las primeras órdenes del día llegarán directamente al vehículo por medio de transmisión directa a la antena de alta ganancia. Usando estos comandos, y haciendo uso de su navegación autónoma, realizará las actividades ordenadas, recolectando información e imágenes, que serán transmitidas al centro de control usando los relés de los orbitadores marcianos. Sin duda, el accidente más prominente del cráter Gale es su pico central estratificado, que será objeto de los estudios principales. Llamado Monte Sharp, se eleva 5 km. por encima del suelo del cráter, y posee laderas de suave inclinación, ideales para que Curiosity las suba, como hizo Spirit con los Montes Columbia. Si el rover sobrevive, e inicia una misión extendida, algún valiente podría dirigirlo para que escale hasta su cima, para obtener así unas vistas de privilegio sobre el propio cráter y los terrenos que le rodean.
Poco queda ya para que llegue. Desde que Phoenix alcanzó el Green Valley en mayo del 2007, ningún artefacto humano ha llegado a Marte, y además, todos los que funcionan tienen ya una respetable edad. Eso sí, si consigue hollar en el cráter, la exploración de dos lugares marcianos en zonas opuestas del planeta podrá regresar, como en los tiempos en los que los dos MER trabajaban desde principios del 2004. Miraremos al cielo para desearla buena suerte.
No hay comentarios:
Publicar un comentario