Este 2018 se acaba, y es el momento de resumir. Un año de subidas y
bajadas, pero con resultados importantes, y que despertó con el rugido de los
27 motores Merlin del potentísimo cohete Falcon
Heavy, poniendo en el espacio algo tan incongruente como un vehículo
eléctrico. Este es el año de los nuevos asteroides, porque hemos conocido ya de
cerca dos de ellos. Desde junio, Hayabusa2
indaga en las proximidades de Ryugu desde distintas altitudes, e incluso soltó varios
vehículos a su superficie, obteniendo información de suma importancia. Sin embargo,
las condiciones de la superficie de este pequeño asteroide han retrasado la
tarea principal de esta sonda: la recogida de muestras, prevista para el año
que viene, más o menos a comienzos. Y desde comienzos de diciembre,
OSIRIS-REx se encuentra alrededor de
Bennu, casi un primo pequeño de Ryugu, y puede que también con el mismo
problema en cuanto a la recogida de muestras. Hoy ha entrado en su órbita para
un examen más concienzudo, y para la recogida de muestras, todavía tardará. Y no
nos podemos olvidar de la porra, porque el KBO 2014 MU69, o Ultima Thule, como
se le apodó, se nos aclarará entre esta noche y mañana, ahora que New Horizons está en pleno modo de
encuentro. En los próximos días tendremos más detalles, pero como ocurrió con
Plutón, para tener toda la información recogida tardará bastante tiempo, en
total unos 20 meses, debido a la enorme distancia. Visitando Marte, un evento
ha marcado toda la actualidad allí: la gran tormenta de polvo global que
engulló el planeta en el mes de junio. Un fenómeno que ha sido investigado
tanto desde la órbita
como desde la superficie, pero que ha provocado un gran
peaje: Opportunity lleva sin
hablarnos desde el pasado 10 de junio, en el sol 5510 de estancia marciana. Nos
tememos lo peor, pero sus controladores no se rinden. En el otro extremo del
planeta, dos hitos para Curiosity:
ser el segundo vehículo más longevo en el suelo marciano, solo detrás de Opportunity, y volver a usar el taladro.
Nueva técnica está usando, y ya ha demostrado su efectividad, con cuatro nuevos
agujeros abiertos en el fondo del cráter Gale, y otros tres intentos. Ahora es
momento de abandonar
el lugar que tanto ha investigado, el llamado Vera Rubin
Ridge, para subir más alturas del Aeolis Mons.
Pero también problemas, en este caso informáticos, lo que le han
obligado a cambiar de ordenador para seguir sus actividades. Y en la órbita, ExoMars TGO terminó el aerofrenado, para
comenzar su tarea primaria, retrasada, eso sí, por la tormenta de polvo, que se
terminó prácticamente en septiembre. En cuanto al resto de orbitadores, nada
nuevo. Y por supuesto, recordar la llegada del lander InSight, llevando allí algo más de un mes, y con uno de sus
instrumentos, el sismómetro, ya en el suelo. Para obtener resultados, toca
sentarse y esperar. Y volvemos a la Luna. O así, porque tenemos la misión china
Chang’e 4 en órbita, preparándose
para alunizar, por primera vez en la historia, en la cara oculta selenita. ¿Cómo
hablará con nosotros? Usando los servicios de un satélite de retransmisión de
datos llamado Queqiao colocado en
mayo en el segundo punto de Lagrange, el L2, a millón y medio de km. de
nosotros, camino del espacio profundo. El momento de la verdad será en los
próximos días, y todos cruzaremos los dedos. También la India regresará a
nuestro satélite, con la misión triple Chandrayaan-2,
con orbitador, lander (Vikram) y
rover. Pero eso toca en los primeros meses del año que viene. En cuanto a los telescopios
se refiere, tras la tormenta provocada el año pasado por el asunto de las ondas
gravitacionales, ha estado más tranquilo, y lo que más ha dominado ha sido, cómo
no, el tema de los exoplanetas. Este periodo nos ha proporcionado más novedades
acerca del
sistema de TRAPPIST-1, con tres de los siete planetas con altas
probabilidades de tener ambientes agradables y agua en superficie. Y también
hemos encontrado uno muy cercano, a casi seis años luz, alrededor de la
estrella de Barnard, y también potencialmente parecido al nuestro. En esta
época los telescopios Hubble y Chandra pasaron por el taller, por
problemas en sus giróscopos, pero volvieron pronto a operar sin dificultades. En
cuanto a los frentes de la ISS, hemos sido testigos este año de un hecho
inaudito: cómo un lanzamiento tripulado era abortado, por un fallo en el
lanzador Soyuz. Las medidas de
seguridad funcionaron como debían, y la dotación de dos astronautas regresó sana
y salva, aunque esto ha obligado a cambiar el orden de los lanzamientos. Poca cosa,
al fin. En cuanto a la lista de altas, muchas y muy importantes, como avanzamos
ya el año anterior: en ciencia terrestre, los meteorológicos GOES-S (ya GOES 17) y MetOp-C, los
científicos
GRACE-FO, Aeolus, Sentinel-3B, ICESat-2 e Ibuki-2, y los instrumentos GOLD (en un satélite geoestacionario),
ECOSTRESS y GEDI en la ISS, este último todavía por instalar, y más allá de la
Tierra, además de las mencionadas InSight,
Queqiao y Chang’e 4, están las importantísimas BepiColombo a Mercurio, iniciando su peregrinaje de siete años, y Parker Solar Probe, para examinar a
Helios como nunca, con resultados iniciales prometedores. Mención aparte
merecen unos pequeños grandes aparatos. Las primeras sondas basadas en las
tecnologías desarrolladas para los Cubesats han alcanzado el espacio profundo
y, viajando por detrás de InSight,
alcanzaron y sobrepasaron Marte. Son los MarCO,
un par de pequeñajos destinados a retransmitir en “directo” el descenso del
nuevo lander marciano, después de una ruta en la que se pusieron a prueba, y
pasaron la prueba, con nota altísima, abriendo
la puerta a futuras misiones de características similares, como los
trece que volarán con el primer lanzamiento del conjunto SLS/Orion, quién sabe si
el año que viene. En cuanto a la lista de bajas, escasa, pero dando donde
duelo: el veterano satélite medidor de vientos QuickScat, y dos misiones Discovery, casi al mismo tiempo: el
glorioso cazador de exoplanetas Kepler,
y el formidable explorador asteroidal Dawn,
los dos por la misma razón: agotamiento del combustible. Y aunque de la segunda
no hay reemplazo, la NASA elevó en abril una nueva misión exoplanetaria. De esta
forma TESS recogió el testigo de Kepler en la tarea de buscar nuevos
planetas extrasolares, aunque todavía no ha revelado ningún resultado destacable.
Pero todo se andará. Además, este año hemos tenido culebrón. Sí, porque ya
desde el año pasado, y durante todo este, se ha estado luchando por elevar el
satélite ICON pero, chico, no hay
manera. Dos intentos, y los dos abortados por lecturas anómalas provenientes
del lanzador Pegasus-XL. No preguntéis
una fecha de lanzamiento, ni la NASA lo sabe. Y para cerrar el año con buen sabor de boca, la genial noticia de que Voyager 2 también abandonó la heliosfera, camino del espacio interestelar. Maravilloso. Y lo que nos espera para el 2019:
las primeras informaciones serias de Parker
Solar Probe y New Horizons, la
continuación de las misiones de Akatsuki
en Venus y Juno en Júpiter, el
séquito marciano a lo suyo, a la espera de noticias de Opportunity, más lanzamientos de ciencia terrestre, esperando, de
una vez, el de ICON, los retornos chinos e hindúes a la Luna, y por supuesto,
los primeros vuelos de las nuevas naves tripuladas de la NASA, esperadas
largamente. Será poca cosa la esperada, pero seguro que será interesante. Y estaremos
aquí para relatarlo.
El año pasado, hablamos de las dos misiones que había seleccionado el programa Discovery para lanzar en la próxima década. Ahora, toca hablar de lo que ha estado haciendo su hermano mayor, el programa New Frontiers.
Cuando la NASA anunció las misiones Lucy y Psyche, se puso manos a la obra para escoger una nueva misión del programa New Frontiers. ¿Que qué es una misión New Frontiers? Sencillamente, una misión escogida tan competitivamente como sus hermanos menores, pero con un presupuesto y ciclo de desarrollo superior. Este programa ha lanzado tres misiones, y las tres están proporcionando ciencia fascinante. Lanzada en el 2006, New Horizons sobrevoló Plutón y sus satélites en su histórico encuentro en julio del 2015, y ahora está a las puertas de llegar a un objeto del cinturón de Kuiper todavía más lejano, el conocido (provisionalmente) como Ultima Thule, o 2014 MU69. En el 2011, era enviado al hermano mayor del sistema su nuevo orbitador, Juno. Llegando allí en el verano del 2016, lleva en órbita y trabajando sin descanso desde entonces, mostrándonos que Júpiter es todavía más extraño de lo que se creía. y más recientemente, enviada al espacio en el 2016, está la misión de recogida de muestras a un asteroide, OSIRIS-REx, que acaba de llegar al asteroide NEO Bennu, para investigarlo y recoger un pequeño pedazo de su superficie, y después traerlo de vuelta. Hay que recordar una cosa: tanto Juno como OSIRIS-REx tienen su origen en proyectos Discovery que, aunque llegaron a la final (como INSIDE Jupiter en el 2001 la primera, y como OSIRIS la segunda en el 2008) fueron derrotadas por Dawn, Kepler y GRAIL. Como se puede ver, el mayor presupuesto del New Frontiers (hasta 1 billón de dólares) ofrece más recursos para resolver cualquier dificultad que pueda aparecer durante el desarrollo del proyecto.
Ahora toca seleccionar la que será la cuarta misión de este programa. Partiendo del Anuncio de Oportunidad emitido por la NASA, se seleccionaron seis temas a investigar: retorno de muestras de un cometa, retorno de muestras del polo sur lunar, mundos oceánicos (Titán y/o Encélado), sonda atmosférica a Saturno, un tour y encuentro con los troyanos, y una misión a Venus. Tras un periodo de varios meses, la NASA recibió 12 propuestas, divididas entre las categorías especificadas, con tres para el tema cometario, una para el lunar, cuatro para los mundos océanicos, uno para el de Saturno, y tres para Venus. El tema de los troyanos, al haber una misión Discovery cubriéndolo, no hubo. Tras revisar cada propuesta (un proceso nada fácil), al final fueron seleccionadas dos para más estudios previos a su selección final. No volveremos a la Luna, ni a Venus, ni entraremos en Saturno. La competición al final estará entre una misión a los cometas y un explorador de los mundos oceánicos, uno en concreto. Una de ellas es más convencional, la segunda es innovadora y radical.
Desde la primera exploración seria a un cometa (la armada del Halley en 1986) hemos examinado otros seis, y de uno de ellos hemos recogido muestras, aunque de manera remota y pasiva (la misión Discovery Stardust). Todos estos encuentros han sido, en su mayoría, sobrevuelos breves en los que las oportunidades de ciencia quedaban reducidas a unas pocas horas. Todo cambió con la llegada de la sonda europea Rosetta al 67P/Churyumov-Gerasimenko, que fue explorado durante dos años, en la primera investigación sistemática de este tipo de cuerpos celestes, proporcionando resultados realmente espectaculares. Ahora, la ciencia considera que el siguiente paso es recoger una muestra de una superficie cometaria. Recoger muestras de un cometa ya se ha hecho con Stardust, y como se recordará, lo hizo desde la distancia, con una raqueta con celdas rellenadas de aerogel y esperando a que las partículas salieran despedidas de la superficie del cometa 81P/Wild 2. El estudio en Tierra de estas muestras ha proporcionado lecciones muy valiosas sobre los cometas, pero la cantidad de material retornado era muy pequeña. En esos días, en el programa tecnológico New Millenium se empezó a preparar una misión que, además de probar nuevas tecnologías y métodos, tenía como tarea la de recoger una muestra directamente de la superficie de un cometa (el 9P/Tempel 1). Era Deep Space 4/Champollion, pero los presupuestos cada vez más pequeños, y la pérdida de las microsondas marcianas de 1999 llevó a reducir, y luego cancelar, este proyecto. Ahora se vuelve a propagar esta idea, y las tecnologías parecen haber avanzado lo suficiente
como para poder formular misiones viables. La candidata New Frontiers para estos temas recibe el acrónimo de CAESAR, Retorno de Muestras para la Exploración Astrobiológica de un Cometa. Este proyecto se deshace de elementos superfluos para dedicarse enteramente a la recogida de muestras. La verdadera intención detrás del retorno de muestras de un cometa está en comprobar en un laboratorio la teoría de que fueron los cometas los que sembraron la Tierra de los ingredientes necesarios para originar la vida. CAESAR, como se nos presenta en las imágenes virtuales, es una sonda de diseño clásico: una estructura rectangular, paneles solares a cada lado de la plataforma, y demás hardware para completar el vehículo. La sonda contará con un bus común (la plataforma GEOStar-3 de Northrop Grumman) para acelerar las cosas, y la ciencia partirá de dos elementos: un sistema de cámaras, y el sistema de recogida de muestras, ambos con herencia de proyectos anteriores. CAESAR contará con hasta seis cámaras, todas ellas derivando de
sistemas anteriores. Contará con una cámara de muy alta resolución (herencia LRO/LROC-NAC, y con rueda de filtros de 8 posiciones), una cámara de media resolución (MastCam 100 de Curiosity) para navegación óptica y cartografía general en distintos colores, una cámara para registrar el proceso de muestreo (MAHLI de Curiosity), dos cámaras de navegación (OSIRIS-REx TAGCAMS), y la inusual cámara situada en el contendedor de muestras, o CANCAM. El sistema de recogida de nuestras también nos es familiar, porque se basa en gran medida en el que usará OSIRIS-REx en Bennu, un elemento de TAG, pero más complicado. En lo esencial, es lo mismo: Brazo desplegable, cabeza de muestras, y sistema de expulsión por gas. Lo que es nuevo es el sistema para almacenar y proteger la muestra, porque cuenta con un contenedor para muestras sólidas, además de uno para muestras gaseosas, con el propósito de proteger ambas en un entorno criogénico. Con la muestra recogida, el contenedor de muestras será introducido en una cápsula
de retorno de muestras (de diseño similar, aunque mayor, al usado en las dos misiones Hayabusa) proporcionada por JAXA, que tiene la interesante característica de separar el escudo de reentrada una vez ha sido usado, protegiendo así la muestra del calor de la fricción durante este evento. En realidad, CAESAR es casi convencional, porque recurrirá a nuevas tecnologías en términos de generación de energía y propulsión. En verdad, ambos elementos estarán relacionados, porque para poder alcanzar su objetivo recurrirá a la impulsión iónica, y a diferencia de Psyche, usará el nuevo modelo de motor iónico de la NASA, el NEXT, versión agrandada del NSTAR de Dawn, que entrega más empuje en virtud a un mayor tamaño. Como debe usarlo a distancias al Sol mayores a lo que se ha conseguido hasta ahora, también empleará una nueva tecnología de paneles solares, que emplea un sustrato flexible, la tecnología ROSA, o Panel Solar Enrollable, demostrada en la ISS recientemente. Las ventajas son obvias: aunque ofrecen una mayor superficie de células solares, el incremento de masa debido a su instalación es mucho menor que si usara paneles solares sólidos. Si es seleccionada, abandonará la Tierra no antes del 2024 (el plan base actual es un despegue para agosto de ese año), un crucero de seis años, combinando la impulsión iónica con un sobrevuelo a la Tierra. ¿El cometa seleccionado? Un viejo conocido: el 67P/Churyumov-Gerasimenko.
¿Por qué? La elección es lógica: como el cometa mejor estudiado de todos, ya se tiene una inmejorable base de datos de la que partir (incluso ya se tiene una zona preliminar en la que poder recoger una muestra), además de permitir el estudio de lo ocurrido a su superficie entre visitas. El proceso de recogida de muestras será como el de OSIRIS-REx: brazo desplegado, descenso lento, paneles solares en forma de Y para protegerlos en caso de problemas. Con la muestra ya asegurada, y separando el sistema de eyección de gas, la cabeza de muestras sería colocada próxima a la cápsula de retorno. De hecho, la propia cápsula estaría dividida en sus dos secciones durante casi toda la misión, sólo cerrándose pocos días antes de la propia reentrada. La razón es la de conservar la muestra lo más fría posible antes de entregarla. Las operaciones en torno al cometa, prácticamente alrededor del afelio de su órbita, durarían unos cuatro años, para entonces ponerse en marcha para la fase de crucero de retorno, de nuevo usando sus motores iónicos (Puede montar hasta tres) y un segundo sobrevuelo a la Tierra, antes de entregar la muestra en el año 2038. En total, 14 años desde el lanzamiento y el regreso. Tras esto, todo el procedimiento de conservación seguirá las mismas restricciones que otras muestras traídas por las misiones anteriores, y almacenadas junto a las otras, en el Centro Espacial Johnson de Houston. En resumen, una misión a largo plazo, muy a largo plazo.
Titán se ha convertido en uno de los objetivos de máxima prioridad por sus condiciones. Como el lugar que más se asemeja a la Tierra (atmósfera densa, masas líquidas en superficie, erosión, elementos prebíóticos), es actualmente el mejor laboratorio natural en el que investigar el nacimiento de la vida. Aunque la información proporcionada por Cassiniy Huygens ha sido muy importante, todavía tenemos grandes lagunas de conocimiento sobre el satélite gigante de Saturno. Uno de ellos es la composición de su superficie. ¿Hay en la superficie de Titán la mezcla de ingredientes necesarios para poder comenzar el gran experimento de la vida? Es una duda acuciante, pero visto lo que ocurre en su atmósfera, no se descarta. La mejor manera de hacerlo es bajar ahí, y explorar la superficie con el equipo científico correcto. El problema es que un lander clásico, como las misiones Viking marcianas, sólo puede hablarnos de un lugar en concreto. La exploración marciana reciente ha demostrado que la movilidad es un potentísimo recurso a la hora de buscar las pruebas necesarias para poder sacar la conclusión correcta, por lo que esta idea se desea aplicar a Titán. ¿Hablamos de un rover? No. El Laboratorio de Física Aplicada de la Universidad Johns Hopkins, siempre queriendo ir más allá para desmarcarse, ha ideado una misión verdaderamente rompedora para examinar la superficie del satélite gigante, y la idea no es otra que volar. En Titán se reúnen las condiciones ideales para el vuelo: atmósfera densa (el
doble que la terrestre) y baja gravedad (1/7 la de la Tierra). Con estos ingredientes, el concepto de la misión Dragonfly es enviar un dron a Titán para poder ir de un lugar a otro de la superficie. En realidad, la idea es de un lander con capacidad de saltar a otra localización, que puede llegar a decenas de kilómetros de distancia. Con un diseño muy similar al de Curiosity, cambia las ruedas, el mástil y el brazo robótico por unos patines como tren de aterrizaje, y un concepto de rotores cuádruples para permitir el vuelo. La misión se concibe a partir de una estancia larga posado en la superficie, examinando todo lo posible el entorno (semanas, puede que meses) para después cambiar de localización volando. La ciencia principal la realizarían dos de las cinco investigaciones que cargaría: el espectrómetro de masa DraMS (una versión evolucionada del sistema SAM de Curiosity) y un espectrómetro de rayos gamma, acompañado por un generador activo de neutrones (DraGNS), necesario porque los rayos gamma cómicos no alcanzan la superficie de Titán. El espectrómetro de masa ingeriría muestras de la superficie mediante una suerte de taladro y una aspiradora que estarían colocados en los patines del tren de aterrizaje, para estudiar los ingredientes químicos existentes, y el espectrómetro gamma sondearía bajo la sonda, verificando los hallazgos, para comprobar la abundancia de elementos idóneos para una probable formación de vida, al menos microscópica. Por ello, investigar en un solo lugar haría que nos perdiéramos lugares quizás mejores en los que realizar mejores hallazgos. Esta no es la única ciencia que daría Dragonfly, porque iría acompañado por otras tres indagaciones: un paquete meteorológico (DraGMet), un juego de cámaras (DragonCam), y diversos sistemas de a bordo, como el de comunicaciones y el de control de actitud centrados en su unidad de medición inercial. DraGMet, incluyendo sensores de velocidad y dirección del viento, humedad de metano, presión atmosférica, de campos eléctricos, de propiedades termales de la superficie, e incluso sísmicos, estudiaría las condiciones tanto en
superficie como en vuelo. DragonCam, como los ojos de la misión, con cámaras frontales, verticales (mirando hacia abajo), y microscópicas, proporcionarían el contexto necesario para los estudios de los instrumentos principales, además de permitir seleccionar zonas ideales en las que dirigirse, funcionando tanto en superficie como en vuelo. En cuanto a la radio, se emplearía de la forma que se usa el sistema RISE en InSight, para estudiar, a través de la rotación de Titán, el estado del interior del satélite, para confirmar la existencia de un océano líquido bajo la superficie. Y para terminar, la unidad de medición inercial serviría para reconstruir un perfil de la atmósfera durante la entrada y descenso hasta la superficie, y después, junto con otras herramientas de navegación durante cada vuelo, para estudiar las capas atmosféricas y los vientos. El lanzamiento estaría fijado en el año 2025, para alcanzar Titán nueve años después, en el 2034. Una vez en superficie (en alguna zona del ecuador, en los campos de dunas que existen allí) la sonda se pondría a trabajar de inmediato, iniciando todo el proceso. Los vuelos propulsados se harían cuando la batería estuviera completamente cargada usando el MMRTG que poseería como fuente de energía, proporcionando vuelos que podrían alcanzar, en teoría, más de 30 km. de distancia desde el punto de despegue hasta el del aterrizaje. Los vuelos se realizarán automáticamente, con el guiado de manera autónoma. Las cámaras se usarían en vuelo para indagar zonas de interés, y una vez en la zona seleccionada para aterrizar, explorar rápidamente los alrededores, para volver al punto de inicio. Con los datos en la mano, se decidiría si volver allí o dirigirse a otro lugar, y así hasta encontrar un buen lugar, comenzando el ciclo. Su misión en Titán sería de dos años, y en ese plazo Dragonfly podría recorrer más distancia que la que han acumulado hasta ahora Spirit, Opportunity y Curiosity en Marte. Como con CAESAR, tocaría esperar la llegada de los resultados.
Son dos misiones que no pueden ser más distintas, pero que ofrecen el potencial de aumentar, de manera significativa, nuestros conocimientos sobre cualquiera de estos cuerpos. Nos gustaría que fueran seleccionadas las dos, pero sólo puede quedar uno. ¿Cual es vuestra favorita?
Falta una semana para el
aterrizaje de InSight en Marte, y es
momento de hablar un poco más de la forma de llegar, y de lo que hará cuando lo
haga. Ante todo, queremos decir que la misión no es la más excitante de las
enviadas a la superficie del planeta rojo. A diferencia de Mars Pathfinder y Sojourner,
los MER, Curiosity, e incluso Phoenix, han sido, y son, misiones
apasionantes. Por su parte, InSight
será una misión de sentarse, y esperar. Lo dijimos en su día, y lo repetimos,
no es una misión muy arriesgada, pero aunque sus objetivos llevan buscándose
varias décadas, hasta que se consigan se tardará tiempo. Pero primero debe
llegar.
Por ser lanzado el primer día de
la ventana de lanzamiento, el 5 de mayo, la ruta a Marte le llevará en total
205 días, y a lo largo de la ruta, la sonda ha realizado hasta cuatro maniobras
de corrección de rumbo, y aún existe la posibilidad de hacer más para apuntar
con mayor precisión en su zona de aterrizaje. La ruta ha sido tranquila, con
las actividades normales: chequeos de salud, mediciones de navegación,
comprobación de los distintos instrumentos… El día 26, todo quedará listo. Todo
el proceso de entrada, descenso y aterrizaje será realizado a partir de una
secuencia de eventos cargada en el ordenador. Lo primero es calentar el sistema
de propulsión de los motores de descenso del lander, casi una hora antes del
inicio de la maniobra. Unos siete minutos antes de la entrada atmosférica, toca
la separación de la etapa de crucero. Desde ese momento, InSight funcionará únicamente con las baterías. Las comunicaciones
pasarán de la antena de media ganancia de la etapa de crucero a una enrollada
en la parte superior de la aerovaina, transmitiendo en banda UHF.
Posteriormente, toca maniobrar, usando los propulsores a través de la
aerovaina, para colocar en posición el escudo de reentrada. Un ángulo demasiado
plano, y la sonda rebotará en la atmósfera. Un ángulo demasiado agudo, y se
incinerará. Tras la recolocación, comenzará activamente la transmisión de
telemetría comunicando los eventos de la secuencia de descenso. Principalmente,
será MRO y su relé Electra quien
recibirá toda la información, pero también
estarán los Cubesats MarCO. En caso de necesidad, varios
radiotelescopios terrestres (Green Bank en Virgina Occidental, Effelsberg en
Alemania, Cerdeña en Italia) podrán recibir las señales transmitidas durante el
descenso. El primer contacto atmosférico se producirá a unos 125 km. de
altitud, comenzando la fase principal de frenado atmosférico, eliminando la
inmensa mayoría de la velocidad con la que llegaba. Durante esta fase, InSight realizará varias maniobras de
entrada guiada, similar a la ejecutada por Curiosity,
para mejorar la precisión hacia el centro de su zona de aterrizaje, y “surfear”
por la atmósfera, evitando demasiado calor por la fricción. Aún así, el escudo
de reentrada podrá llegar a temperaturas de hasta 1500 grados, y soportará
deceleraciones de hasta 9 g. Tras atravesar lo más peligroso de la entrada, ya
viajando dentro de la atmósfera, las capas cada vez más densas van eliminando
todavía más velocidad y, cuando sus acelerómetros detecten que la velocidad ha
caído por debajo del umbral prefijado, se disparará el paracaídas, a una
altitud de unos 13 km de la superficie. Al tiempo, el altímetro radar se activará,
al tiempo que una batería auxiliar para proporcionar energía extra. Tras la
separación del escudo de reentrada, ya innecesario, el altímetro empezará a
calcular la distancia de la sonda hacia el suelo, al tiempo que las patas del
tren de aterrizaje se despliegan. Cuando el radar detecte una distancia al
suelo de 1.2 km, y la velocidad haya descendido por debajo de los 60 metros por
segundo, llega la separación final, con el lander cayendo brevemente antes de
encender los 12 motores de descenso, pero
usando al mismo tiempo los
propulsores laterales para desviarse de la ya vacía aerovaina y paracaídas.
Tras esta separación, las comunicaciones pasan directamente a la antena UHF del
lander, evitando perder datos valiosos. Este momento del descenso se usará para
la reorientación final del lander, para posarse en la posición óptima para su
misión científica. Con el descenso controlado establemente por los motores, la
distancia al suelo disminuirá gradualmente hasta que, al final, sensores de
contacto situados en las patas detectarán el contacto con el suelo, lo que
provocará el comando que ordena el
apagado de los motores. Al disponer de
amortiguadores, las patas ablandarán este último descenso. InSight habrá aterrizado, reposando sobre sus tres patas. En la
zona de aterrizaje, serán las dos de la tarde, hora local marciana, y la fase
más peligrosa habrá concluido.
El primer día marciano, o Sol, de
estancia de InSight está marcado como
Sol 0. Nada más contactar con la superficie, lo primordial es transmitir la
señal de que ha llegado, que podrá llegar directamente a través de MarCO, de los radiotelescopios
terrestres, o varios minutos después, de Mars
Odyssey, que pasará sobre Elysium Planitia en ese momento. Para que MRO transmita todo lo recibido habrá que
esperar una hora hasta que su órbita le lleve a volver a estar en contacto con
las antenas terrestres de la red DSN. En superficie, el recién llegado empezará
vaciando todo el combustible que quede (si es que queda), y se dispararán los
dispositivos pirotécnicos que mantienen bloqueados los distintos apéndices. Sus
paneles solares no se desplegarán hasta pasados 25 minutos, para permitir que
el polvo levantado por los motores de descenso se vuelva a asentar. Las
primeras imágenes se tomarán también en este primer sol, probablemente de la
cámara de contexto colocada bajo la plataforma, enseñando por primera vez el
área de aterrizaje, y de trabajo. Tras esto, el lander se apagará para dormir y
permitir que los paneles solares recarguen la batería. En Tierra, los ingenieros
habrán recibido los primeros indicadores de telemetría que indican el estado
del vehículo antes de ir a dormir. Para el Sol 1, comienza lo importante.
La primera semana de InSight en Elysium la pasará entre
chequeos de salud y puesta a punto de los distintos sistemas. También en estos
días se empezarán a tomar los primeros datos, preliminares, con los sensores
auxiliares, para comprobar la meteorología, la temperatura, y demás. Como
comunicamos en su momento, la orientación será muy importante: el área de
trabajo estará en el lado sur del lander, para evitar en todo momento sobras
provocadas por el propio vehículo. Los paneles solares se extenderán en las
direcciones este y oeste, las mismas de las dos antenas de media ganancia tipo
cuerno del sistema RISE. La
clave de las actividades posteriores es la
comprobación del brazo robot. Con casi dos metros de largo, posee juntas de
hombro, codo y muñeca, movidos por cuatro motores, proporcionándole una
libertad de movimientos de cuatro grados. Como este será el principal método de
ubicar los instrumentos en el suelo, saber que funciona correctamente es vital.
También porque porta la otra cámara. Con el brazo extendido, será posible tomar
imágenes de la zona de trabajo, con las que acabar componiendo una representación
tridimensional de ella, que será duplicada en la caja de arena del JPL, en la
que se ha instalado una réplica casi exacta. Es posible que se tarden unas dos
semanas en escoger las zonas en las que colocar los instrumentos SEIS y HP3,
y al tener una pala, el brazo robot podrá trabajar en la zona para prepararla
en anticipación al despliegue de los instrumentos. En caso de haber rocas,
podrá quitarlas de en medio, y también aplanar la zona moviendo la tierra. Su
pala, como la de Phoenix, es capaz de
acumular hasta 500 gramos de material en su interior. Con el terreno preparado,
tocará el traslado.
El proceso de colocar la
instrumentación en el suelo marciano, algo nunca antes intentado en otro
planeta, será lento por necesidad. En el brazo robot hay una agarradera de
cinco puntas, y sobre cada elemento a descender una especie de bola en la que
la agarradera debe asentarse. Como durante el lanzamiento, crucero y proceso de
aterrizaje, los elementos a situar en la superficie han estado fijados a la plataforma,
hay que liberarlos. Después, la agarradera será situada en posición, y fijada
al extremo del instrumento. Ya firmemente sujeto, el brazo levantará,
lentamente, el hardware, y lentamente también, se desplazará hacia la zona
escogida en la que colocarlo, y una vez en vertical sobre el lugar elegido, lo
bajará hasta que entre en contacto con la superficie. La liberación, por
seguridad máxima, se realizará únicamente por comando
enviado directamente
desde tierra, evitando con ello cualquier liberación accidental que pudiera
suponer un riesgo. En caso de no estar firmemente asentados, o estar en una
zona demasiado inclinada (más de 15º es inaceptable), podrán ser trasladados a
otra zona mejor. Todo el proceso será registrado usando la cámara del brazo, y
los momentos finales, también por la cámara de contexto. El primero de los
aparatos a depositar en el suelo marciano será el sismómetro SEIS, y el proceso
durará varios soles, permitiendo al equipo en tierra verificar todo el
procedimiento. Hay una restricción, y es que no se puede volver atrás, los
cables de conexión de energía y datos entre el lander y los instrumentos no
pueden volver a retraerse. Cuando SEIS ya repose en el suelo, lo primero que
actuará será en sistema de nivelado, para posicionar el aparato de la manera
óptima para detectar todo movimiento sísmico de la manera óptima. Los primeros
soles de SEIS en el suelo se usarán para validar el sistema y comprobar que
todo está en su sitio, antes de instalar su Escudo de Viento y Termal, que será
depositado sobre él también de manera cuidadosa usando el brazo robot. Cuando
esta estructura en forma de domo esté sobre SEIS, los faldones que le cubrirán,
realizados también con mantas multicapa, se extenderán hasta llegar al suelo,
protegiendo al aparato de toda influencia externa. Entonces, llegará el momento
para HP3. Tras ser depositado en el suelo (siguiendo el mismo
procedimiento lento y cuidadoso) tocará enterrarse. Su punta perforante, el
Mole, tiene en su interior un mecanismo de autoamartillado, que le permite
enterrarse
lentamente, avanzando pocos milímetros con cada golpe. El mecanismo
utiliza un motor, enganchado a una caja de cambios, que comprime lentamente un
resorte, que se libera rápidamente, generando el golpe que permite su
enterramiento, y así una y otra vez. Junto con esto, cuenta con sensores de
inclinación, sensores de temperatura y calentadores. El proceso de
enterramiento durará varias semanas, siguiendo un proceso de toda una serie de
golpes (lo suficiente como para descender 15 centímetros), para parar un par de
días para que se disipe el calor y hacer pequeñas mediciones, para después
continuar. El Mole irá tirando de un cable que tiene acoplados 14 sensores de
temperatura, pero no están colocados a distancias regulares, de hecho, cuanto
más lejos del Mole, más separados están. Tiene cable suficiente como para
alcanzar los 5 metros de profundidad, aunque la mínima será de 3. En caso de
que el suelo sea demasiado duro, se quedará a la mínima, si no, podrá
continuar. En cuanto a RISE, el sistema de radio ciencia podrá actuar el
primero, con sus emisiones directas comenzando tan pronto como el último día de
la primera semana de estancia marciana.
Cuando acabe el proceso de
colocación de los instrumentos, y su puesta a punto, que puede alargarse hasta
los 60 soles, comenzará la fase verdaderamente científica de la misión. Si los
dos primeros meses han estado dominados por una gran actividad, con comandos
cada día para ir situando todo en su sitio, la fase verdaderamente científica
es, como hemos dicho, de sentarse, y esperar. Como SEIS y HP3 son
instrumentos que funcionan de forma autónoma, los comandos para la sonda serán
los mínimos imprescindibles, una carga por semana, como mucho. La tarea
primaria, de un año marciano, y 40 soles adicionales, de duración, estará llena
de actividades mínimas, contactando con la sonda para comprobar que todo anda
bien, y para descargar los datos acumulados. Pero hay que recordar que SEIS, HP3
y RISE no son los únicos instrumentos que hay a bordo. También está la APSS, es
decir, sus sensores meteorológicos, su sensor de presión, su magnetómetro y su
radiómetro, sin olvidarnos de las cámaras. Las
cámaras serán usadas
intensamente durante la fase inicial de la misión, pero cuando todo este
proceso haya acabado, podrán ser usadas para otras cosas. El primer uso, más
allá del de escoger lugares en los que situar los instrumentos, será el de la
caracterización de la zona de aterrizaje. El lugar escogido en Elysium Planitia
será plano por necesidad, con una alta inercia termal delatando gran cantidad
de talco marciano y con pocas rocas, además de estar alejado lo máximo posible
de zonas de alto relieve. El paisaje, por lo tanto, será más o menos como el
encontrado en los cráteres Gusev y Gale, aunque en la zona central existen abundantes
cráteres de pequeño tamaño que podrían resaltar en las imágenes. Sobre todo la
cámara del brazo, llamada IDC (la Cámara de Despliegue de Instrumentos), al ser
elevada por el brazo robot, permitirá obtener imágenes para componer una visión
global a su alrededor. Esto permitirá conocer la geografía de la zona,
importante para estudiar el cómo de la formación de esta localización en
concreto. En menor medida, las dos cámaras podrán estudiar también la geología
de la zona. Las dos cámaras son dispositivos a color, con filtros Bayer que
permiten juntar la información de las longitudes de onda azul, verde y roja
para tener una secuencia tal y como la veríamos con nuestros propios ojos. Aunque
carecen de otros filtros que puedan discriminar distintos tipos de minerales,
aún podrán hacer una identificación limitada de la composición de la
superficie, simplemente viendo la variación de color del material a su
alrededor. El resto de sistemas tiene un doble propósito. Por un lado, generan
resultados sobre las condiciones ambientales, útil para el estudio general de
Marte, pero también están montados para auxiliar a los datos que recojan SEIS y
HP3. La meteorología del lugar la monitorizarán los sensores TWINS y
el sensor de presión. Ya hemos dicho que TWINS está formado por hardware de
repuesto del desarrollado para el sistema REMS de Curiosity, por lo que proporcionarán no solo información de
temperatura, también de la velocidad y la dirección del viento. Ambos sensores
se sitúan sobre pequeños pedestales, por lo que son, olvidándonos del brazo,
los elementos a mayor altitud sobre el suelo, más de un metro por encima,
dándoles un campo de visión claro. Por su parte, el sensor de presión permitirá
estudiar su variación con el paso de los días, las semanas, las estaciones, y
los años. No varía demasiado con respecto a los que ya llegaron al planeta,
pero el de InSight es un sensor de
alta resolución, hasta 10 veces más que todo lo enviado. Ya se sabe que la
presión atmosférica en Marte puede llegar a variar hasta un 25% del verano al
invierno, pero este aparato permitirá ver, con mayor precisión, la variación de
presión a lo largo de los días y las horas. Los estudios meteorológicos también
se beneficiarán del uso de las cámaras. La cámara de contexto ICC, al apuntar
directa y continuamente al área de trabajo, estará idealmente situada para, con
el tiempo, ver el movimiento de la arena y cómo se va depositando sobre los dos
instrumentos. E caso de existir dunas, las imágenes de la IDC de un mismo punto
en las proximidades del lander con días o semanas de margen puede mostrar el
movimiento de estas dunas. La IDC también puede ser movida de tal modo que mire
hacia el cielo, para poder ver, en caso de aparecer las nubes en movimiento
sobre él, así como la observación de la opacidad atmosférica, es decir, la
cantidad de polvo en suspensión. En misiones anteriores, una de las formas era
usar un filtro especial que permite a las cámaras mirar directamente al Sol. Creemos
que InSight carece de él, pero hay
otros modos, como mirar hacia el horizonte. Esta medición de opacidad es interesante
porque el planeta acaba de salir de un evento de polvo global, el más intenso
desde el 2001. Pero ya lo hemos dicho, estos sensores tienen un segundo
propósito. SEIS es un aparato sumamente sensible, siendo capaz de detectar
movimientos sísmicos más pequeños que el diámetro de un átomo. Para ello, no
solo sus sensores están dentro de un contenedor de vacío, también pueden estar
afectados por lo que ocurra a su alrededor. Esa es la razón del escudo que se
colocará sobre él, pero el viento también proporcionará una señal indeseada que
deberá ser conocida para poder ser retirada cuando los datos se empiecen a
procesar. Por ello, conocer la velocidad y la dirección del tiempo, así como la
variación de temperatura y presión diurna, ayudará a limpiar los datos. Otra fuente
de interferencia sobre SEIS es el de la señal magnética. Elysium es una de las
zonas más magnéticas del planeta, descubierto por Mars Global Surveyor, y esta señal puede interferir en los muy
sensibles sensores del sismómetro. Para ello, con la intención de conocer la
intensidad y la dirección de las señales magnéticas, incorpora el IFG, un
magnetómetro clásico de núcleo saturado triaxial, el primero enviado a la
superficie marciana. Poder caracterizar el entorno magnético alrededor de la
sonda ayudará también a eliminar esta señal indeseada de los datos de SEIS
durante el procesado. Este sensor, muy sensible, supone también una oportunidad
para la ciencia, ya que su posición en superficie permitirá obtener datos sobre
la variación diaria y temporal de los campos magnéticos fósiles que pueblan
esta región marciana. En cuanto al radiómetro, se asocia con HP3, y
es en esencia una prolongación del aparato que obtendrá información de la
temperatura de la superficie, datos que complementarán los que se recojan bajo
el suelo. El radiómetro está situado en el lado norte, por lo que podrá ver no
solo cómo varía la temperatura entre el día y la noche, también como influye la
sombra de la plataforma en la forma de absorber o liberar el calor solar por
parte del suelo. El radiómetro
tiene dos lados, con tres sensores idénticos,
registrando las mismas longitudes de onda en el infrarrojo termal. Junto con la
misión de apoyo a su aparato, este radiómetro tiene objetivos propios para ver
cómo esta superficie, seguramente arenosa, retiene calor durante el día y lo expulsa
durante la noche, información sin duda que permitirá conocer también, en cierta
medida, el tipo de material que lo conforma. No lo hemos visto en ningún lado,
pero como el brazo robot posee una pala, también podría existir la posibilidad
de que se hagan experimentos de mecánica del suelo. Con la pala situada en el
suelo, y empezando a arrastrarla, se puede conocer el estado del suelo: si el
polvo está agregado o suelto, más blando o más duro, al tiempo que podría permitir
escavar tal y como lo hizo Phoenix,
para ver las capas del suelo, comprobando si se encuentran estratificadas o no,
y ver qué hay debajo del nivel del suelo. Como toda misión, existe la
posibilidad de extensión de misión una vez terminada la tarea primaria, y en
este caso resultaría beneficioso para sus instrumentos principales, ya que con
estas investigaciones, cuanta más información, más precisión.
La tarea de los aparatos primarios
permitirá conocer distintas cosas. SEIS, como todo sismómetro, estudiará el
interior del planeta partiendo de las ondas sísmicas y cómo se propagan, para
descubrir las distintas capas que existen bajo el suelo, que permiten o evitan
su extensión. El método principal será la detección de terremotos marcianos,
eventos sísmicos internos, aunque se cree que no sean demasiado intensos, con
temblores que pueden llegar, como mucho, a 6 grados en escala terrestre. También
tendrá otro método, externo, para estudiar el interior. Como han demostrado los
orbitadores, Marte todavía es bombardeado por meteoritos, y cuando éstos
impactan, también generan ondas sísmicas, que SEIS podrá captar y registrar. Lo
ideal sería tener un segundo sismómetro, situado en el otro extremo de Marte,
pero las limitaciones de presupuesto solo han permitido uno. HP3
será como una suerte de termómetro que permitirá saber cuánto calor queda en el
interior del planeta, y cómo
este calor se escapa. La razón principal del
estado actual de Marte es precisamente la pérdida del calor interno. Cuando el
campo magnético se apagó, la dinamo planetaria desapareció, y el núcleo se
empezó a enfriar. Saber cuánto calor despide actualmente Marte permitirá saber
cuánto ha perdido hasta la fecha. Y finalmente RISE ayudará a establecer la estructura
interna del planeta. Ya se sabe cómo es, más o menos, por dentro, gracias a Mars Pathfinder, pero los datos de RISE,
a lo largo de un año marciano (o más si continua) añadirán precisión al
conjunto de datos. Como se recordará, el núcleo terrestre comprende el 54% del
diámetro total de la Tierra, en Marte, está entre un 40% y un 60%. RISE ayudará
a reducir ese margen de forma notable. Pero para conseguir estos datos, habrá
que esperar.
Todos sabemos de la meteorología terrestre, que vemos y, en algunos casos,
sufrimos, y ahora empezamos a saber más de la meteorología espacial, que cada
vez es más un riesgo para esta sociedad nuestra, que cada vez confía más en la
tecnología. Pero, ¿y si estas dos meteorologías podrían afectarse e interactuar?
La respuesta, de acuerdo con los datos que existen, es un sí. Misiones anteriores
y actuales, como Dynamics Explorer, UARS, IMAGE o TIMED, han proporcionado
información de cómo la entrada de partículas energéticas procedentes de la
actividad solar (viento solar, CME’s) llegan a influir en la ionosfera, la capa
más alta de la atmósfera. Al tiempo, muchos satélites centrados en la
observación del clima terrestre han mostrado cómo vientos atmosféricos se
elevan, alcanzando la misma ionosfera. Ha llegado, al fin, el momento de
indagar en profundidad esta región de la atmósfera, en la que trabajan cientos
de satélites, y los astronautas de la ISS.
La ionosfera es la capa atmosférica en la que, como decimos, llegan
las partículas neutrales de la atmósfera baja, y las partículas energéticas
procedentes del espacio. Para nuestra sociedad, la ionosfera es básica: permite
las comunicaciones por radio, al hacer rebotar en ella las ondas de radio,
dirigiéndolas a donde queremos, y más recientemente, para la transmisión de las
señales de los satélites de GNSS que se utilizan en tierra para todo tipo de
fines, desde llevarte en coche a un lugar que no conoces, o para estudios sobre
el movimiento de los continentes. El problema es, que cuando la ionosfera
recibe demasiadas partículas energéticas, puede provocar efectos perniciosos. Así,
las comunicaciones se interrumpirían, la navegación basada en GNSS sería casi
imposible, y lo que es peor, produciría apagones masivos, al sobrecargar las
redes energéticas. Una de las dificultades para explorar la ionosfera es que
está en constante flujo, potentes vientos redistribuyen las partículas que hay
allí constantemente y, de acuerdo con lo visto hasta ahora, cambian dependiendo
de las estaciones, pero también con la misma rotación de la Tierra. Para entender
mejor lo que ocurre ahí arriba, la NASA ha preparado dos misiones distintas,
pero complementarias entre sí.
Para observar y entender la ionosfera, y sus cambios, el programa
Explorer ha optado por dos perspectivas. La primera la conseguirá ICON, el Explorador de Conexión
Ionosférica. Desde órbita baja, seguirá todo este movimiento proporcionando
datos muy detallados con un equipo de cuatro instrumentos. Con una misión base
de dos años, confían en conseguir la información suficiente como para entender
lo que sucede allí, y mitigar con ello los efectos sobre la tecnología. Como parte
de la serie Small Explorer, ICON se
basa en la plataforma LEOStar-2 de Orbital-ATK (ahora integrada en Northrop
Grumman), como RHESSI, AIM o NuSTAR. Se trata de un satélite de cuerda única, sin apenas redundancia.
La inmensa mayoría de sus funciones están dentro de una nueva característica: la
llamada Unidad de Aviónicas Maestra, que reúne el
ordenador de a bordo, el
sistema de control de actitud y el sistema de gestión energética. Para comunicaciones,
cuenta con un sencillo sistema de banda-S, no solo para contactar directamente
con las antenas terrestres, también usando los satélites TDRS, y se espera que
el satélite genere 1 GB de datos al día. Estabilizado en sus tres ejes para
orientarse, cuenta con lo habitual: unidad de referencia inercial, dos
escáneres estelares, sensores solares y 4 ruedas de reacción, con tres sistemas
de descompensación magnética, y no cuenta con ninguna propulsión. Para la
energía, un único panel solar con cinco secciones, alimentando los sistemas de
a bordo, y cargar al tiempo una batería de ion-litio. El control termal, el
básico: calentadores, radiadores y mantas multicapa. Lo dicho, la ciencia la
entregará un equipo de cuatro instrumentos. El principal es MIGHTI, Interferómetro Michelson para imágenes Globales de Alta
resolución de la
Termosfera y la Ionosfera. Deriva del sistema WINDII del satélite UARS, y su misión será la de recoger mediciones
de viento y temperatura a distancias desde 90 hasta los 300 km de altitud. Cuenta
con dos ópticas, situadas perpendicularmente a 45º y 135º de la dirección orbital
del satélite, mirando hacia el norte. En realidad, son dos sensores idénticos,
y cada uno está compuesto por un potente bafle para quitar exceso de luz, una
pupila de entrada, un par de espejos, cada uno a 45º, un grupo de lentes, un
interferómetro equipado con una rejilla fija y otra móvil, una serie de lentes,
espejos y filtros, hasta llegar a un sensor CCD de 2048 x 4096 pixels, dividido
en tres secciones, una que ocupa la mitad del sensor para un filtro de línea
verde (557.7 nm), y la otra mitad dividida entre el filtro de línea roja (630
nm) y una serie de cinco filtros infrarrojos centrados alrededor de los 762 nm.
El segundo es FUV, espectrógrafo de imágenes de Ultravioleta Lejano. Contiene
una
cámara y un espectrógrafo combinados, y ambos sistemas reciben la luz de una
torreta móvil que permitirá apuntar el sistema en distintas direcciones. Una vez
dentro, la luz llega a un espejo de escaneo, que dirige la luz al espejo
primario, de ahí, a una rejilla, que divide la luz en las dos longitudes de
onda a las que es sensible el aparato, alcanzando un espejo secundario. Este espejo
divide todavía más la luz, entregando cada longitud de onda (135.7 y 157 nm) a
un conjunto propio de espejos, alcanzando cada uno un sensor CCD, sobre el que
hay antes un convertidor ultravioleta, que transforma los fotones ultravioleta
en fotones de luz visible, a los que son sensibles los CCD. Su labor es la de
crear imágenes de composición de la termosfera de día, y de noche, obtener
perfiles de composición y altitud de la densidad de iones en la cara nocturna.
EUV, el espectrógrafo de Ultravioleta Extremo, servirá para obtener mediciones de los perfiles de altitud del
brillo de aire en luz de ultravioleta extremo
asociado al oxígeno cargado positivamente situado a altitudes a partir de los
200 km. en longitudes de onda de 61.7 y 83.4 nm. El diseño es relativamente
sencillo, con una apertura con potentes bafles, una abertura de dimensiones
reducidas, rejilla de difracción con recubrimiento de cromo, iridio y otras
sustancias, y una placa microcanal como sensor. Y por último, el IVM, Medidor
de Velocidad de Iones. En realidad porta dos, y cada uno dispone de lo mismo:
un analizador de potencial retardante, y un medidor de deriva de iones. El primero
es un sensor planar, con una apertura circular, rejillas semitransparentes, y
un sensor de estado sólido, para estudiar el flujo de plasma. En cuanto al
segundo, también es un sensor planar, con sistemas de rechazo y supresión, y un
sensor sólido dividido en cuatro secciones. En funcionamiento, recogerá datos
sobre la deriva de iones alrededor del satélite, la temperatura de los mismos
iones y la densidad total de electrones a su alrededor. En total, son tres
sistemas remotos, y uno in-situ, y todo este conjunto está controlado por el Paquete
de Control de Instrumentos, que gestiona y dirige toda la información al
grabador de datos de a bordo. La masa total del satélite es de 288 kg.
Debido a sus pequeñas dimensiones y masa, el lanzador seleccionado ha
sido el Pegasus-XL. Montado bajo la
panza del avión portador Stargazer,
volará desde Cabo Cañaveral hasta una zona en la horizontal de Daytona. El día del
lanzamiento, previsto para el 26 de octubre, el Stargazer despegará desde la base de Florida, volará en la dirección a la
que debe lanzar a ICON y, llegado a
unos 10.000 metros, lo lanzará. El proceso durará unos 10 minutos, y cuando
todo acabe, el satélite estará en una órbita a 575 km. de altitud, inclinada
sobre el ecuador 27º.
Como ya hemos dicho, serán dos años de misión, en los que estudiará
desde cerca la termosfera y la ionosfera, y las turbulencias que se dan allí
como consecuencia del contacto entre la meteorología terrestre y la espacial. Pero
no es la única herramienta que estudiará estos fenómenos, ya que otra lo hará desde
más lejos. La misión GOLD (Observaciones
a escala Global del Limbo y el Disco) está diseñada para hacerlo desde órbita
geoestacionaria. En realidad, es el primero de toda una nueva generación de
misiones, más baratas, más rápidas en su desarrollo, y capaces de proporcionar
ciencia nueva. No es un satélite al completo, sino el instrumento en sí, que es
una carga útil huésped de un satélite de telecomunicaciones, del que se
aprovecha para el viaje al espacio, para sus comunicaciones, energía y control
de actitud. GOLD se encargará de
observar los efectos de las tormentas geomagnéticas en la atmósfera terrestre,
analizar cómo responde la atmósfera a la actividad global, de forma global,
además de la propagación de ondas y mareas procedentes de las capas bajas
atmosféricas hasta la termosfera, y estudiar la ionosfera ecuatorial acerca de
la formación y la evolución de las irregularidades en la densidad del plasma
allí. Para ello, se construyeron dos sistemas idénticos, uno junto al otro. Cada sistema posee una apertura de
30 x 30 mm., un espejo de escaneo, un par de
espejos, una rejilla, y el sensor, una placa microcanal. En total, son 150 mm.
de longitud focal. Es curioso el sistema porque posee tres aberturas para
espectrografía, y el espejo de escaneo tiene dos lados, levemente inclinados,
permitiendo así escanear todo el disco terrestre simplemente rotando el espejo
hasta casi los 180º. Los dos canales registran las mismas longitudes de onda de
luz ultravioleta, entre 132 y 162 nm, lo que le hace sensible a diversos
constituyentes de la termosfera como oxígeno atómico o nitrógeno molecular. El satélite
portador es el SES-14, construido
partiendo de la plataforma Eurostar E3000, la primera completamente eléctrica
en su propulsión, gracias al uso de motores iónicos de efecto Hall para todas
sus maniobras. Con unas dimensiones de 7 x 5.4 x 2.7 metros, desplaza una masa
de 4423 kg. en el momento del lanzamiento. El realidad, GOLD ya está en órbita,
lleva desde el 25 de enero, pero si no ha llegado todavía a su órbita de
trabajo, previsto para los próximos dos meses, es por un problema durante el
lanzamiento, con el sistema de guiado del Ariane
5-ECA, en el que un valor erróneo provocó una
inclinación excesiva: 21º, en
vez de los 3º previstos. Por suerte, al disponer de motores iónicos, la
viabilidad de la misión no ha sufrido debido a esto, y aunque llegará tarde a
su posición en órbita geoestacionaria (47.5º Oeste), la vida útil del satélite,
y de GOLD, no se ha acortado. La situación
geoestacionaria sobre el continente americano permitirá obtener mediciones
continuas de una misma zona terrestre, y cómo varia a lo largo del día,
observará el ciclo día-noche, y con el tiempo, juntar una base de datos que
enseñe cómo responde la atmósfera terrestre a la actividad solar.
Primera luz de GOLD, 11 de septiembre del 2018, 135.6 nm, oxígeno atómico
Dos misiones distintas, pero un objetivo común. Son dos misiones de un
presupuesto relativamente escaso, pero capaces de ofrecer potentes prestaciones
para estudiar un aspecto de nuestro planeta poco entendido, con ICON observando desde cerca, y GOLD desde muy lejos. Desde aquí, toda
la suerte.
Cuando arrancamos la afición por
la astronomía, eran pocos los libros a nuestra disposición, y ellos eran
antiguos, con poca información novedosa (el que más, de apenas 1986), pero
resultaban sin duda reveladores. Pero algo llamaba nuestra atención: a Marte
había habido muchas misiones, muchas más a Venus, y decenas a la Luna (¡incluso
gente!), pero a Mercurio, solo una: Mariner
10. ¿Cómo era posible?, nos preguntábamos, si parecía que hasta se habían
mandado más sondas incluso a Júpiter. Bueno, la verdad es que, para alguien tan
escasamente versado en el asunto como éramos en aquellos tiempos, era poco más
que un misterio.
Todo cambió cuando descubrimos, a
comienzos del año 2004, que la NASA estaba próxima a lanzar una nueva misión a
Mercurio: MESSENGER. ¡Por fin!, nos
dijimos, y más alegres estábamos tras saber que entraría en su órbita. Pero nos
desanimamos después de saber el largo tiempo que la sonda tendría que invertir
hasta poder insertarse alrededor del planeta. Por ello, durante todo ese tiempo
largo desde el lanzamiento y su llegada definitiva, investigamos para saber el
por qué de tan largo Camino de Santiago.
La causa principal está en el
mismo Helios. Nuestro Sol es la fuerza dominante de nuestro sistema solar, con
más del 99% de la masa total de nuestra parcela cósmica, por lo que todo se
supedita a ella. La principal razón del por qué es tan complicado viajar a
Mercurio, y no digamos entrar en órbita, es la inmensa gravedad de nuestra estrella. Llegar a Marte
es relativamente sencillo, a Venus, más o menos también (que le pregunten a Akatsuki), y a veces, en más fácil
llegar a un asteroide NEO que a la propia Luna, en términos de gasto de
combustible. Y llegar a Mercurio directamente es técnicamente posible, pero
económicamente, no recomendable. Para conseguirlo, una hipotética sonda tendría
que cargar una enorme cantidad de combustible, lo que provocaría que la
cantidad de instrumentos a equipar se redujera notablemente (sin tener en
cuenta la protección contra el calor solar), y una sonda así provocaría el uso
de un lanzador pesado, lo que sin duda hubiera encarecido sumamente la factura
total del proyecto. Obviamente, había que buscar otra forma.
La solución es la de usar
múltiples asistencias gravitatorias. Recurriendo a la idea de Giuseppe Colombo
y que se aplicó al plan de misión de Mariner
10, y multiplicándola, el especialista en trayectorias del JPL Chen Wan-Yen
ideó una estrategia básica que empleaba los sobrevuelos planetarios y eventos
propulsivos llamados Maniobras de Espacio Profundo. Esta fue la estrategia
seguida por MESSENGER, realizando
seis sobrevuelos planetarios (uno a la Tierra, dos a Venus, y tres a Mercurio) y cinco Maniobras de Espacio Profundo para así poder llegar. ¿Pero por qué? Por la gravedad solar. Para que una sonda espacial
entre en órbita de otro cuerpo celeste lo primero que debe hacer es igualar su
velocidad orbital, y luego encender su motor principal para perder velocidad en
relación con el planeta, permitiendo así que su gravedad le atrape. Pero para
llegar a Mercurio, hay que tener en cuenta dos cosas. La primera es la propia
velocidad orbital de Mercurio. Mientras que la Tierra rodea al Sol a unos 29
km/s, Mercurio corre a unos velocísimos 47.3 km/s, por estar más cerca de Helios.
Esto significa que una sonda en dirección a Mercurio debe acelerar, y mucho. Pero
si no hacemos nada para frenarla de camino a Mercurio, se pasará de largo,
porque la propia gravedad solar tiende a acelerar todo lo que se acerque a su esfera de influencia. Lo que se
busca, entonces, es un equilibrio: casi como tener un pie en el acelerador y
otro en el freno. Así, por un lado, queremos que la gravedad solar nos acelere
lo suficiente como para poder llegar, pero por otro lado necesitamos frenar porque, si no, nos pasamos, de ahí que sean necesarias las asistencias gravitatorias (que
en este caso, no solo reducen la velocidad, también cambian la órbita,
acercándola más al lugar a donde queremos llegar) y las Maniobras de Espacio
Profundo. Es por ello que, aun con un plan así, se necesita una sonda con gran
cantidad de combustible. MESSENGER,
una sonda pequeña y compacta, de solo 1107 kg. de masa al despegue, cargó una
gran cantidad, en total un 54% de la masa del vehículo. La ruta tuvo gigantesco éxito, y con MESSENGER funcionando
más tiempo de lo que cualquiera hubiera calculado, la misión nos proporcionó
unos resultados formidables.
MESSENGER permaneció orbitando Mercurio poco más de cuatro años, y acumuló una enorme base de datos sobre el planeta, proporcionando muchos resultados increíbles: y los más destacados fueron: Mercurio es rico en elementos volátiles, y aunque no más que los demás, sí en elementos que se evaporan en condiciones de alta temperatura; depósitos de hielo en el polo norte del planeta, dentro de cráteres en
sombra permanente; un campo magnético desviado con respecto al eje de rotación planetario que, aunque 100 veces menos potente que el terrestre, todavía muestra una magnetosfera digna de tal nombre, que provoca aceleración de partículas energéticas, principalmente electrones, así como corrientes alineadas de campo; unos surcos, poco profundos, como agujeros irregulares en la superficie, probable resultado de la sublimación del material superficial, y que parece que todavía sigue en marcha, aunque las razones del por qué están todavía por explicar; el vulcanismo ha sido una de las mayores fuerzas que ha dado forma su superficie, algo ya indicado inicialmente por Mariner 10, pero
confirmado, y en grado sumo, por MESSENGER; la constatación de que Mercurio ha ido encogiendo con los siglos, por el enfriamiento y la contracción de su interior, que ha dejado su huella en la superficie; y el encontrar que la exosfera de Mercurio varia estacionalmente, dependiendo de su posición orbital e inclinación de su eje de rotación. Estos son algunos de los descubrimientos que ha hecho MESSENGER, y algunos son todavía misterios por resolver, como los surcos superficiales. Las limitaciones de presupuesto delPrograma Discovery provocaron una sonda que, aunque muy capaz, no pudiera dar luz a otras preguntas sobre el planeta, como su composición superficial, que todavía provoca preguntas. Ya es la hora de ir respondiéndolas.
La Agencia Europea del Espacio lleva pensando en Mercurio mucho tiempo, casi desde el inicio de su programa a largo plazo Horizon, y siguieron con ello con la versión ampliada, Horizon 2000. Este programa ha proporcionado grandes saltos en nuestro conocimiento del cosmos, con misiones como SOHO, ISO, Rosetta, Herschel y Planck, y más recientemente, Gaia. La idea de la misión a Mercurio nació al menos a mediados de la década de 1990, con la vista puesta a resolver los misterios que posee el planeta, y quería hacerlo con una arquitectura innovadora: se pensó en dos orbitadores, uno general, para el planeta y su entorno, y otro exclusivo para la magnetosfera, además de un elemento de superficie, para recoger información in-situ. Por aquellos tiempos, la agencia japonesa ISAS empezaba un programa de misiones planetarias, y vio esta misión a Mercurio como exponente ideal para desarrollar su tecnología y hacer ciencia novedosa. De esta forma, ESA e ISAS unieron fuerzas para la misión en el año 2000, y juntas empezaron a planificar lo que sería necesario, las prioridades, qué poner, qué quitar, y todas esas cosas. Finalmente, el acuerdo entre la ESA y JAXA (la actual agencia espacial japonesa, en cuyo interior está ISAS) en el año 2009 dio vida a la misión. La verdad es que, ya antes de este acuerdo firmado y cerrado, y prácticamente coincidiendo con el primer sobrevuelo de MESSENGER a Mercurio, en enero del 2008, se hizo pública la arquitectura final de la misión.
Todo el programa, globalmente, se le conoce como BepiColombo, en honor al matemático e ingeniero Giuseppe (Bepi) Colombo, en su contribución a hacer posible la primera exploración del primer planeta del sistema solar. Al final, la misión estará compuesta de cuatro elementos: el orbitador general, el orbitador magnetosférico, un escudo solar para este segundo orbitador, y el primer módulo SEP (propulsión solar eléctrica) en volar al espacio. Veamos cómo es cada parte.
Construido por la ESA, el orbitador general responde al acrónico de MPO, Orbitador Planetario de Mercurio. Su forma es la de una caja rectangular relativamente plana, con las esquinas recortadas cruelmente. El cuerpo principal de la sonda mide 2.4 x 2.2 x 1.7 metros, y de él salen diversos apéndices. Si hay algo que realmente domina la sonda es su enorme radiador de 3.7 metros, que cubre el lado mayor de la sonda. A diferencia de MESSENGER, MPO no posee escudo solar propio, recurre a otras formas de protección para sobrevivir en Mercurio. La sonda debe rechazar el calor proveniente del Sol, el que reemite la superficie de Mercurio, así como el exceso de calor emitido por todo su equipamiento interno. Para ello cuenta con una preparación exhaustiva para deshacerse de todo este calor sobrante y mantener el interior de la sonda a una temperatura razonable. Todo el calor interno es redirigido mediante tuberías hacia las ventanas del radiador, y éste, al estar siempre orientado hacia el espacio profundo se deshará de él. Pero no es lo único, ya que cuenta con mantas multicapa especiales, que cuentan con una capa exterior de Nextel (dos láminas), 11 capas de aluminio, 26 de un material aluminizado llamado Upilex, además de otras 10 de Mylar, también aluminizado. Todo esto se ha separado en cuatro paquetes, separados por espaciadores de fibra de vidrio y una sustancia llamada Aerofoam, y para completarlo todo, entre las cuatro capas, losetas de kaptón. La capa más externa está formada por fibra de cuarzo, y todo esto ha sido cosido a mano. Además, existen 12 huecos en las plataformas superior e inferior que, una vez libres, necesitan también protección, para evitar la entrada del calor dentro de la sonda. Por ello, cuenta con elementos de cierre con el mismo material multicapa del resto de la sonda. Esos 12 huecos (ocho de 140
mm. de diámetro, y cuatro de 170) son los interfaces mecánicos y eléctricos entre MPO y los demás componentes de la misión. Internamente, la sonda está construida en forma de doble H, como MESSENGER, permitiendo un fácil acceso al interior durante el montaje, y formando una estructura rígida para el vuelo, además de ahorrar masa para el despegue, lo que supone agregar más carga útil en su interior. En general, todo su hardware de funcionamiento es herencia de misiones recientes de la ESA. Así, su ordenador es el ya clásico de las misiones europeas, empleando como núcleo el procesador ERC-32, que gestiona todas las operaciones de a bordo, y va acompañado por un grabador de datos de estado sólido, con capacidad para 384 gigabits. Para transmitir todo lo almacenado (ya sea telemetría de a bordo, o los datos científicos) cuenta con un sistema de comunicaciones dual. Nada nuevo en este sentido, salvo por las bandas seleccionadas. La primaria es la de banda-X, que transmitirá a través de una antena de alta ganancia parabólica de 1 metro de diámetro, móvil en dos ejes, una antena de media ganancia, tipo cuerno, al final de un mástil móvil, también en dos ejes, y dos antenas de baja ganancia. La
novedad es que, por primera vez en una misión europea, se usa banda-Ka, unido a la antena de alta ganancia, para transmitir datos a alta velocidad. Para ello, MPO cuenta con un nuevo transpondedor de espacio profundo, un nuevo desarrollo de la ESA, que pronto se unirá a futuras misiones de la agencia. Este nuevo sistema de comunicaciones será capaz de transmitir hasta 1550 Gb de datos al año, todo un salto tecnológico. MPO es una sonda estabilizada en sus tres ejes, que emplea lo siguiente para determinar su actitud: unidad de medición inercial, tres escáneres estelares, grupos de sensores solares precisos, cuatro ensamblajes de ruedas de reacción, y la propulsión de la sonda. Este vehículo ha sido construido para ser una plataforma sumamente estable y muy equilibrada, de hecho, los escánares estelares (que están instalados en el panel del radiador, y cuentan con obturadores para evitar fugas de luz solar accidentales en los sensores) han sido colocados en un soporte óptico altamente estable, sobre el cual también se han colocado las cámaras científicas y su altímetro láser, y normalmente usará dos de los escáneres y las cuatro ruedas de reacción para sus operaciones en órbita. En cuanto a su propulsión, cuenta con dos juegos. Mientras que el menos potente sirve para pequeñas correcciones, desaturar las ruedas de reacción o para gestionar la actitud de la sonda, en caso necesario, el más potente será usado para la inserción orbital y para las diversas maniobras ya en órbita. Siguiendo el ejemplo iniciado por MRO, el sistema de propulsión principal cuenta con cuatro motores que deben funcionar al unísono para proporcionar el empuje necesario para las maniobras a completar, contando para ello de 669 kg. de combustible. En cuanto a la generación de energía, se confía en un panel solar de tres secciones, 7.5 metros de largo y 8.2 metros cuadrados de superficie activa, que cuenta además con reflectores solares ópticos para rechazar el máximo de luz solar que le llega. Aunque nunca mirará directamente al Sol (siempre estará inclinado para evitar el exceso de calor) producirá la energía suficiente para el funcionamiento de los sistemas de a bordo, además de cargar una batería de ión litio. Prácticamente todos los sistemas de a bordo son redundantes, incluso la propulsión, en previsión de probables, que no deseados, problemas durante la misión. En cuanto a la ciencia, MPO realizará 11 investigaciones. SIMBIO-SYS, Espectrómetros y
Cámaras para el Observatorio Integrado MPO de BepiColombo, es un paquete que concentra las cámaras de a bordo y uno de los espectrómetros. En esencia, sería como juntar, en MESSENGER, las cámaras de MDIS y el espectrómetro infrarrojo de MASCS. El sistema está compuesto por tres elementos. El principal es HRIC, el Canal de Imágenes de Alta Resolución. Como implica su nombre, será la cámara de mayor resolución en órbita de Mercurio. Para su construcción, se ha empleado lo mejor de dos mundos. El elemento óptico principal es un telescopio reflector Ritchey-Chretien, con una apertura de 100 mm, pero de ahí va a un corrector óptico, un pequeño sistema refractor de tres elementos, y sirve a un sensor tipo CMOS de 2048 x 2048 pixels. Este sistema podrá obtener imágenes en blanco y negro pero también a color, ya que cuenta con cuatro filtros, uno pancromático (650 nm) y otros tres de color e infrarrojo cercano (550, 700 y 880 nm). Estos filtros están construidos en una placa que se ha colocado justo sobre el sensor, dispuestos a modo de tiras. El modo de funcionamiento será como el de la cámara CaSSIS de ExoMars TGO, usando el modo Pushframe, aprovechando el movimiento orbital para arrastrar los filtros por la superficie y así crear las imágenes con cualquier combinación de filtros, para formar imágenes a color real o a falso color. Pero eso no es todo, porque justo delante se ha instalado un potente bafle cilíndrico para proteger la óptica del exceso de luz solar, evitando que llegue al sensor. De esta forma, HRIC es un sistema con una longitud focal de 800 mm (f/8), y a su altitud mínima sobre el planeta, la resolución será de 4.5 metros. El segundo canal se llama STC, Canal Estéreo. Como indica su nombre, será una cámara que obtendrá imágenes estereoscópicas de la superficie de Mercurio, y lo hará con un único sistema. Para ello cuenta con dos aperturas (que también usan potentes bafles), que apuntan 20º hacia delante y detrás con respecto a la vertical sobre el planeta. De ahí llegan a espejos de doblado, que redirigen la luz hacia el interior del sistema, alcanzando su telescopio, una unidad Schmidt modificada de 15 mm. de apertura y 95 mm. de longitud focal (f/6.3), que sustituye la placa correctora por un doublet para corregir las aberraciones del espejo primario. De ahí, la luz pasa por un sistema corrector de dos lentes,
para finalmente entregar la luz a un sensor CMOS idéntico al de HRIC. Al ser también STC un sistema Pushframe, dispone de una placa de filtros sobre el sensor, en este caso cinco, uno pancromático (700 nm) y otros cuatro a color e infrarrojo cercano (420, 550, 750 y 920 nm ). A la altitud mínima, formará imágenes de 40 km. de ancho, en una casi perfecta convergencia estéreo, y una resolución de 50 metros. Al usar un solo sistema se ahorra espacio, tiempo y recursos. El último canal es VIHI, la cámara Hiperespectral en Visible e Infrarrojo. Este sistema se compone de un telescopio Schmidt de 25 mm de apertura (protegido por un bafle) y un espectrómetro de rejilla de difracción en configuración Littrow (longitud focal 160 mm, f/6.4). La luz, tras ser recogida por el telescopio, pasa por una estrecha abertura, y entra en el espectrómetro, con la difracción realizada por una rejilla plana. El sensor es del tipo HgCdTe bidimensional de Mercurio-Cadmio-Telurio, de 256 x 256 pixels colocado sobre un Circuito Integrado de Lectura tipo CMOS. En funcionamiento, es un sensor Pushbroom que, a medida que avanza, va recopilando datos creando una imagen de 2D, y el movimiento de la sonda permite la obtención de la tercera dimensión, creando una representación de datos llamada Cubo Hiperespectral, en la que se representan, en una sola secuencia, todas las longitudes de onda (256 de manera simultánea, entre 0.4 y 2 micrones) que registra el sistema. De esta forma, el sistema podrá crear mapas de la composición superficial con una resolución máxima de 100 metros en 256 bandas espectrales distintas. Como todos los espectrómetros, dispone de su propia unidad de calibración interna, y un radiador para su sensor. La misión de SIMBIO-SYS está clara: cartografiar Mercurio lo mejor posible geográficamente, topográficamente y en términos de composición. Para ampliar la composición superficial del planeta cuenta con MERTIS, el Espectrómetro y Radiómetro de
Infrarrojo Termal para Mercurio. Se trata de un sistema compacto y de construcción modular, con la misión de crear mapas del planeta en la región indicada en su acrónimo, algo que no se ha hecho hasta ahora. La arquitectura es relativamente sencilla: utiliza un telescopio de una longitud focal de 50 mm (f/2) del tipo Anatisgmático de tres espejos, que es servido por un espejo de apuntamiento, a donde llega la luz por parte de la superficie desde un tubo con bafles internos. Este espejo rota a cuatro posiciones: el sistema, un puerto espacial, y dos objetivos de calibración internos. Cuando la luz llega al telescopio, el tercer espejo envía la luz a una abertura estrecha, entrando en
el espectrómetro, que dispone de una arquitectura Offner, que emplea una rejilla de difracción circular convexa y un gran espejo Offner cóncavo. Una vez ha pasado por todo esto, la luz es recogida por un conjunto de microbolómetros, ideales porque no necesitan refrigeración activa. El rango de longitudes de onda del sistema es de entre 7 y 14 micrones en 80 bandas espectrales. La técnica de escaneo de infrarrojo termal es muy usada en Marte, especialmente por el sistema THEMIS de Mars Odyssey, y ha demostrado ser muy potente. Hay un segundo canal dentro de MERTIS. Mientras que el espectrómetro es conocido como MERTIS-TIS (que estará activo el 90% del tiempo), también cuenta con un radiómetro infrarrojo (MERTIS-TIR). Usa el mismo tren óptico del telescopio, pero no el espectrómetro: los detectores del radiómetro, de tipo termopila, se sitúan en la abertura, y se activan cuando ésta se cierra, registrando la luz de infrarrojo termal entre 7 y 40 micrones en dos canales. El instrumento se encuentra instalado en la sonda de tal forma que, mientras el puerto planetario apunta a la vertical de Mercurio, el puerto espacial se abre sobre el lado del radiador. La tarea de MERTIS es la de componer un mapa de la mineralogía en la que aparezcan algunos minerales aún no encontrados en su superficie. Yendo más allá del sensor ultravioleta del MASCS de MESSENGER, está PHEBUS, el Sondeo de la Atmósfera de Mercurio mediante Espectroscopia Ultravioleta. De todo los
instrumentos de escaneo remoto, es el único que no ve directamente hacia la vertical, su entrada óptica se encuentra en el lateral del radiador. Un bafle exterior rotatorio en un eje permite la entrada de luz, y apuntar en cualquier dirección: hacia el planeta, hacia el limbo, o al propio espacio. Internamente, en el codo que permite entrar la luz al sistema, hay un espejo rotatorio de carburo de silicio, inclinado 100º, justo detrás de la pupila de entrada, que introduce la luz ultravioleta en el sistema, dando una longitud focal a todo el sistema óptico de 170 mm. Tras pasar por una abertura estrecha, la luz se dirige a dos rejillas de difracción, una para las longitudes de onda de ultravioleta extremo (55-155 nm) y otra para ultravioleta lejano (145 423 nm). Los sensores escogidos son placas microcanal, con áreas activas de 1024 x 512 pixels, optimizadas para registrar las longitudes de onda correspondientes. La de ultravioleta extremo emplea un fotocátodo de ioduro de cesio, y no dispone de ventana, la correspondiente al ultravioleta lejano, usa un fotocátodo de cesio y telurio, y cuenta con una ventana de fluoruro de magnesio, registrando longitudes de onda entre los 145 y los 315 nm. Estos son los canales principales, pero además hay un tercero, considerado de ultravioleta cercano, que no son más que un par de tubos fotomultiplicadores con un fotocátodo bialcalino para estudiar las líneas de emisión del calcio (405 nm) y el potasio (423 nm), situados junto al canal de ultravioleta lejano. La tarea es la de examinar en profundidad la exosfera de Mercurio, seguir su estacionalidad, y tratar de encontrar nuevos elementos que no hayan sido encontrados hasta ahora. Para más estudios superficiales, en este caso
químicos y elementales, está MIXS, el Espectrómetro de Imágenes de rayos X para Mercurio, y su tarea es similar a la del XRS de MESSENGER, en que debe cartografiar la distribución de distintos elementos como silicio, titanio, aluminio, hierro, magnesio, sodio, calcio, potasio, manganeso, azufre, cromo o níquel, entre otros, y lo hará con una aproximación innovadora. MIXS está formado por dos canales, formando así, en términos de resultados, el equivalente a cámaras de luz visible de campo ancho y ángulo cercano. Para estudios globales cuenta con MIXS-C. Se trata de un instrumento que emplea un colimador para obtener resultados sobre una gran área de Mercurio. A diferencia de colimadores de instrumentos anteriores, con láminas paralelas, el de MIXS-C está compuesto de placas microcanal dispuestas radialmente, recubiertas internamente por láminas de iridio. Este colimador dista del sensor 55 centímetros, lo que permite cubrir áreas del planeta con una resolución de 40 km. en el perigeo. Por su parte, MIXS-T se trata de un verdadero telescopio de imágenes en rayos X, con un módulo óptico tipo Wolter 1 de incidencia oblicua. Pero en vez de usar elementos cristalinos, como en las misiones astronómicas, el de MIXS-T está compuesto de placas microcanal, con la zona sensible en el interior de cada una de las tres vainas concéntricas, la mayor de 210 mm. A pesar de emplear este método, funciona de modo similar, entregando la luz al detector, obteniendo imágenes de la superficie de Mercurio con una resolución de 1 km en el perigeo. Los dos instrumentos usan un mismo tipo de detector, un Sensor de Pixels Activo, de un tipo nuevo llamado de "macropixels", cada uno formado por un conjunto de 64 x 64 macropixels de 300 micrones, haciendo sensible al sistema a las longitudes de onda en rayos X de entre 0.5 y 7.5 keV. Ambos trabajarán a partir del método de la fluorescencia de rayos X, por lo que dependen la emisión solar en esta gama del espectro electromagnético. Como cualquier sensor de su tipo, necesita un dispositivo que le diga la cantidad de rayos X que provienen de nuestra estrella, y por eso cuenta con SIXS, el Espectrómetro de Intensidad de rayos X y partículas Solares, que se compone de dos elementos, el detector de rayos X (tres detectores PIN de arseniuro de galio que miden el espectro solar entre 1 y 20 keV sin quemarse, gracias a la adopción de materiales resistentes y sistemas de refrigeración, cubriendo 1/4 de todo el cielo) y el detector de partículas (un sensor cúbico central de escintilación de ioduro de cesio activado por talio con cinco de sus seis lados cubiertos por un detector de silicio, dentro de un domo con cinco colimadores de aluminio y wolframio, que realiza espectroscopia de partículas de baja resolución, registrando protones y electrones entre 0.33 y 30 MeV para el primero y entre 50 keV y 3 MeV para el segundo, cubriendo también 1/4 de todo el cielo), con la tarea de medir los flujos de rayos X y de partículas energéticas en los alrededores del planeta, y ayudar en la tarea de MIXS. Para más estudios químicos y elementales, cuenta con la única contribución rusa, el MGNS, Espectrómetro de rayos Gamma y Neutrones
para Mercurio. Aprovechando la agresión de las partículas de rayos cósmicos sobre la superficie, estas partículas rebotan liberando rayos gamma y neutrones, con energías características a cada elemento que un espectrómetro puede registrar. Para ahorrar masa y recursos, las dos capacidades están construidas en un único paquete, al estilo del sistema GRaND a bordo de la sonda Dawn. Por ello, cuenta con un sensor para rayos gamma, formado por un cristal de escintilación de bromuro de lantano de 8 cm. de diámetro y altura conectado a un tubo fotomultiplicador, registrando rayos gamma entre 300 keV y 10 MeV, registrando la composición elemental hasta un metro bajo la superficie. En cuanto a los sistemas de neutrones, se encargarán de estudar los elementos volátiles presentes en los polos del planeta, para detectar, entre otros, hielo de agua, para confirmar los hallazgos de MESSENGER. Son cuatro los sensores de
neutrones: uno de ellos es un cristal de Estilbeno de 54 centímetros rodeado por un escudo anticoincidencia plástico (neutrones de energías de entre 0.3 y 10 MeV) y tres formados por contadores proporcionales de helio-3, basados en el sistema HEND que porta Mars Odyssey. Uno de ellos carece de de escudo, sirviendo como detector de neutrones termales de energías hasta los 0.4 eV, el segundo posee un escudo de cadmio (una lámina de entre 0.5 y 1 mm de grosor) para neutrones epitermales (neutrones entre 0.4 eV y 1 keV), y el tercero, además de la lámina de cadmio, dispone de un escudo de polietileno (para neutrones rápidos entre 0.1 y 500 keV). Apoyando la misión topográfica encargada al SIMBIO-SYS/STC, también cuenta con el BELA, el Altímetro Laser de BepiColombo. En lo
básico, parece el típico sistema de los que empiezan al proliferar, es decir: transmisor láser y expansor de haz, y telescopio receptor. Será el segundo en llegar a Mercurio, pero es muy distinto al MLA de MESSENGER, quien utilizaba cuatro telescopio refractores como sistema receptor. BELA emplea el primer láser de alta potencia europeo en salir del sistema Tierra-Luna, y es del mismo tipo de los que han volado a Marte, a Mercurio, a la Luna o a algún asteroide. El transmisor láser está conectado a un expansor de haz (que amplifica la señal, creando un punto de luz de entre 20 y 50 metros en superficie) protegido por un bafle y un filtro termal. La emisión láser está fijada a 1.064 nm de luz infrarroja. Rebotando en la superficie, el haz láser es recibido por un telescopio reflector en ejes, con un espejo primario de 25 cm (f/5), y con todos los elementos ópticos construidos en berilio, y recubiertos en oro, un telescopio también protegido por un gran bafle. La luz recibida pasa al módulo del detector, y aquí empieza lo nuevo, porque cuenta con una aproximación completamente digital, pasando a un fotodiodo de avalancha de silicio a través de un filtro de interferencia de estrecha longitud de onda, para pasar directamente a las electrónicas digitales, donde se determina el tiempo de vuelo (el que pasa entre la emisión y la recepción), la intensidad del pulso y su anchura, para pasar a la unidad de procesado digital. Si bien la altitud óptima para obtener datos precisos de la topografía de Mercurio es de 1000 km., podrá obtener datos valiosos más allá de esa altitud. La intención es ampliar el mapa topográfico recopilado por MESSENGER únicamente sobre la latitud 30º norte, debido a la órbita que se escogió para esa misión pionera, construyendo una cartografía con márgenes de error que no superarán los 30 cm. Pasando a la instrumentación in-situ, primero mencionamos el MPO-MAG, el Magnetómetro. Su trabajo será calcular, desde su órbita, la intensidad del campo magnético del planeta, y las fluctuaciones debido a la interacción con el viento solar. Para ello cuenta con dos sensores de núcleo saturado triaxiales situados en un mástil desplegable de 3.2 metros de largo. Se necesitan dos porque el primero debe registrar el campo magnético propio de la sonda, mientras que el externo es el que mide el ambiente. Ambos están protegidos por envoltorios termales, para no quemarse por las temperaturas ambientales que hay allí. El tipo de sensor utilizado tiene herencia en muchas misiones anteriores, ya que sensores similares han volado a casi todos los lugares del sistema solar, incluyendo asteroides y cometas. El segundo in-situ es SERENA, Búsqueda para el Rellenado y Abundancia Neutral Emitida de la Exosfera, pretende estudiar las interacciones gaseosas entre la superficie, la exosfera y la magnetosfera de Mercurio y el viento solar. Desde que la superficie de Mercurio prácticamente carece de protección ante la agresión de las emisiones solares, parte del material de la superficie de sublima, alcanzando la exosfera, pero al tiempo, también las partículas energéticas tanto del viento solar y las que existen en la magnetosfera contribuyen al mantenimiento de esta exosfera mercuriana. Para analizar la composición, estructura vertical y fuentes de los procesos de deposición, cuenta con cuatro herramientas. Los dos primeros se centran en las partículas
neutrales. ELENA (Átomos Neutrales Emitidos de Baja Energía) se trata de un sensor tipo TOF, o Tiempo de Vuelo, que emplea un novedoso sistema de obturación oscilante ultrasónico. Cuando los átomos entran en el sistema, pasan por el sector de INICIO, lo que pone en marcha el conteo de tiempo, y está formado por dos membranas con micoraberturas, una fija, otra es la oscilante, por lo que las partículas solo pasan cuanto las microaberturas están alineadas. Tras pasar, llegan a la cámara de PARADA, a 12 cm. de las membranas, y se compone de un deflector de iones (elimina las partículas cargadas) y un conjunto de placas microcanal, que detectan los átomos neutrales y generan la señal de parada. Al calcular el tiempo entre el INICIO y la PARADA, se determina la masa del átomo, y de esta forma, el tipo.
El segundo es STROFIO (Espectrómetro de Masa del Inicio para un Campo Rotatorio), la única contribución de la NASA a la misión, como parte del programa Discovery. Es un sistema único en su tipo, que quiere estudiar átomos neutrales de muy baja energía. Tiene dos aperturas en forma de chimenea opuestas, y los átomos entran por cualquiera de ellas, cada una posee una apertura de 2 centímetros cuadrados. Nada más entrar, pasan a una fuente de ionización, donde los átomos son ionizados y acelerados. Desde allí, llegan a una región de dispersión, donde estos iones son desviados por un campo eléctrico rotatorio, para llegar a placas microcanal anulares, sensibles a la posición. También es un sensor TOF, con la entrada en el campo rotatorio señalando el inicio. Debido a su configuración, será más efectivo a bajas altitudes sobre Mercurio.
Los otros dos se centran en los iones. MIPA (Analizador de Precipitación de Iones en Miniatura) está formado por un deflector electrostático (dos electrodos cilíndricos), un analizador electrostático y una célula de TOF, para llegar a un par de multiplicadores de canal cerámicos, todo con la misión de estudiar el ratio de precipitación del plasma, la respuesta del planeta ante el viento solar, y el estudio de la estructura y la dinámica de la magnetosfera de Mercurio. En cuanto a PICAM (Cámara de Iones Planetarios), se encargará del estudio de los iones en la exo-ionosfera de Mercurio. Los iones entran por una abertura radial interna, y una vez dentro, son desviados por un espejo de iones elipsoidal, pasando después por una puerta de inicio. Después entra en un analizador toroidal, para
salir hacia un segundo espejo de iones, que desvía los iones hasta el detector, una placa microcanal. Además de ser un sensor tipo TOF, es también una cámara, o así, para los iones, registrando todo el cielo de una sola vez. Y para terminar, los dos experimentos de radio ciencia y de la Relatividad. MORE, Experimento de Radio ciencia del Orbitador de Mercurio, empleará su sistema de comunicaciones para estudiar el interior de Mercurio mediante el método habitual, siguiendo las desviaciones de la señal provocadas por el efecto Doppler, y se hará en las dos frecuencias disponibles a MPO, todo para reconstruir su campo gravitatorio, su estructura interna, oblicuidad y libraciones, y contará con ello con la ayuda de los datos de BELA y SIMBIO-SYS. Y para terminar, ISA, el Acelerómetro Italiano de Resorte, es un paquete con un
sistema triaxial de acelerómetros altamente sensible cuya tarea es estudiar, alrededor de Mercurio, la Teoría de la Relatividad General de Einstein, y lo hará en combinación con los escáneres estelares, la cámara HRIC y junto con MORE. El Propósito es medir las aceleraciones provocadas por la presión de la radiación solar y de la emisión reflejada por la superficie, para eliminarlas y convertir la sonda en un vehículo libre de toda resistencia. Situado prácticamente en el centro de masas de MPO, estará atento a cualquier fuerza ejercida sobre la sonda y registrar la aceleración impartida para así anular sus efectos en los datos. Son cuatro los propósitos de ISA: Estudiar el campo gravitatorio de Mercurio y sus variaciones temporales debido a las mareas solares, observar anomalías gravitatorias locales para el estudio del manto y la corteza del planeta, medir el estado de rotación de Mercurio para averiguar tanto el tamaño como el estado físico del núcleo, y localizar el centro de masas de Mercurio para así mejorar la determinación de los parámetros post-newtoninanos de la Relatividad General. Casi nada. Una vez cargada de combustible, la sonda declarará una masa de 1230 kg.
Construido por la agencia japonesa JAXA, el segundo orbitador se llama MMO, Orbitador Magnetosférico de Mercurio. En lo que respecta a MPO, no puede ser más distinta en diseño. Se trata de un prisma octogonal, con un diámetro de 1.8 metros. Aunque la altura de la plataforma de la sonda es de 0.9 metros, los paneles laterales miden 1.06 metros de alto, para proteger el interior de la sonda. También en este caso la protección termal es un elemento básico, aunque es más convencional que la de MPO. La principal defensa son los paneles laterales, que en gran medida están recubiertos por reflectores solares ópticos, es decir, espejos, con la misión de expulsar toda, o casi, la luz
que recibe del Sol. Es casi un sistema pasivo, aunque cuenta con alguno activo para varios sistemas de a bordo, pero en general, junto a los espejos, emplea mantas multicapa (parte superior), láminas de kaptón con recubrimientos de germanio, pinturas térmicas, y otros, todo para mantener el hardware internamente a una temperatura adecuada para su funcionamiento. Internamente, está formado por dos plataformas, separadas por un hueco de 0.4 metros entre ambas, construidas alrededor de un tubo central, y divididas en cuatro secciones por mamparos internos. Por este diseño mecánico y termal, se ha adoptado una estabilización por rotación, que además de por sencillez de operación, es ideal para la tarea del estudio que debe realizar, en cuanto a la
magnetosfera mercuriana y su interacción con el viento solar. El ratio de rotación es de 15 rpm, una cada 4 segundos, controlada por dos sensores solares, un escáner estelar (situado en la plataforma inferior) y propulsores de gas frío. Junto a todo esto, un amortiguador de nutación, para mantener estable la plataforma durante esta rotación. La orientación del eje de rotación será de 90º con respecto a Helios, para evitar insolación a la parte superior de la sonda. La rotación también tiene la función de ayudar a desplegar los distintos apéndices (dos mástiles y cuatro antenas) usando la fuerza centrífuga acumulada. A pesar de rotar, hay un componente que no: la antena principal. Se encuentra en el centro de la plataforma superior, y un mecanismo situado en su base la cancelará para que esta pueda mantenerse apuntada hacia la
Tierra. El sistema de comunicaciones emplea banda-X, y lo hará a través de la antena de alta ganancia (un sistema de conjunto de fase, de forma ovalada y 0.8 metros de diámetro, pintada de blanco para reducir la carga termal en órbita de Mercurio) y una antena de media ganancia, tipo bi-reflector, que se proyectará desde la parte inferior de la sonda. Durante todo el crucero, ambas estarán plegadas contra el cuerpo de la sonda. Su ordenador es el tradicional japonés, que ejecutará todas las funciones de a bordo, y está acoplado a un grabador de datos de 2 GB de capacidad. Hay otros dos ordenadores, los DPU's, o Unidades de Procesado de Datos. la número uno está dedicada en exclusiva a uno de los instrumentos, y la segunda a los otros cuatro, y cada una cuenta con su propio almacenamiento interno, de hasta 256 MB de capacidad. En cuanto a su sistema energético, por células solares y batería. Los paneles solares ocupan la mitad superior de los paneles laterales, que están recubiertos al 50% entre células y reflectores solares ópticos. Además de proporcionar energía suficiente para MMO, también cargan una batería de ión-litio. Como hemos dicho, cuenta con cinco investigaciones. La más grande se llama MPPE, el Experimento de Plasma y Partículas de Mercurio. Su misión es la de indagar en el plasma, las partículas de alta energía y los átomos neutrales energéticos, todo para estudiar la estructura, dinámica y procesos físicos en la magnetosfera de Mercurio; las interacciones entre la superficie, la exosfera y la magnetosfera; y las físicas de shock sin colisión en la heliosfera interna. Para ello, usará nada menos que siete herramientas: tres para estudios de electrones (dos llamados MEA, Analizadores de Electrones de Mercurio, sensores electrostáticos toroidales para mediciones de electrones rápidos con energías entre 3 y 25.500 eV, creando representaciones tridimensionales de los electrones magnetosféricos; HEP-ele, Partículas de Alta Energía-electrones, para investigación de este tipo de partículas entre 30 y 700 keV), otros tres para iones (HEP-ion, Partículas de Alta Energía-iones, para realizar un estudio de su población en el rango energético de entre 30 y 1500 keV; MIA, Analizador de Iones de Mercurio, otro sensor electrostático toroidal, para medir iones del viento solar y de la magnetosfera de Mercurio de forma simultánea, entre 5 eV y 30 keV; y MSA, Analizador de Espectro de Masa, un sensor también toroidal electrostático pero con espectrómetro tipo TOF, para estudios del plasma entre 5 eV y 40 keV y entre 1 y 60 unidades de masa atómica) y el sensor de átomos neutrales energéticos, ENA, para registrar y analizar este tipo de partículas entre 10 eV y 3.3 keV, que se crean por el fenómeno de intercambio de carga, proporcionando información remota acerca de la interacción del plasma y el gas del plasma en el entorno de
Mercurio. Todo este paquete está controlado por la DPU número uno. MMO-MAG, es el principal magnetómetro de esta sonda. La tarea es la de estudiar la magnetosfera de Mercurio y comprender su comportamiento en respuesta al viento solar, y un poco también, a cómo es por dentro el propio Mercurio. También son sensores de núcleo saturado triaxiales, y se sitúan en uno de los mástiles, con el sensor interno (diseño analógico) a 1.6 metros de la punta del mástil, y el segundo (digital), y externo, en el extremo. En realidad, junto con los de MPO, se forma la investigación MERMAG, para así tomar mediciones coordinadas desde sus distintas órbitas, captando fenómenos mucho más rápido que una única sonda. PWI, la Investigación de Ondas de Plasma, ha sido concebido para el estudio remoto de la dinámica y la estructura de la magnetosfera de Mercurio, detectando ondas de plasma, campos eléctricos y ondas de radio. Este instrumento está formado por dos sensores de
campos eléctricos llamados MEFISTO (Herramienta In-situ de Campos Eléctricos de Mercurio, que son dos de las antenas de 15 metros de largo) y WPT (Antena de Sondeo-Cable, las otras dos antenas de 15 metros), dos sensores de campo magnético (LF-SC, Bobína de Búsqueda de Baja frecuenta, y DB-SC, Bobina de Búsqueda de Banda Dual, situado en el extremo del segundo mástil), que están conectados a tres receptores (SORBET, Espectroscopia de Ondas de Radio y Ruido Electrostático Termal; AM2P, Medición Activa del Plasma de Mercurio; y EWO, compuesto por un Detector de Campos Eléctricos EFD, por un Capturador de Forma de Ondas WDC, y un Analizador de Frecuencias de A bordo, OFA). El siguiente es el único sensor óptico de MMO, y es MSASI (pronunciado mushashi, y se nos viene a la a la cabeza uno de los superacorazados clase Yamato de la
Segunda Guerra Mundial), Cámara Espectral para el Sodio de la Atmósfera de Mercurio. Este elemento es uno de los principales que hay en la exosfera del planeta, y estudiar su distribución y origen es muy importante. Para conseguirlo se recurre a lo que se conoce como cámara de escaneo por rotación, un tipo de cámara que conoce a la perfección el ratio de rotación del vehículo, y que adquiere los datos cuando su fuente de luz aparece en su entrada óptica. En su apertura, un capuchón evita la entrada del exceso de luz en el sistema, y ésta llega a un espejo de escaneo móvil de 15 x 25 mm. y con un margen de movimiento de entre 25º y 55º en 15 pasos. En caso necesario, este espejo también actúa como tapa para evitar el exceso de luz en el sistema. Antes del espejo existe un filtro de rechazo de la luz infrarroja. Una vez la luz es recogida por este espejo de escaneo, llega a un segundo, fijo, de 20 x 15 mm, para llevar la luz a una rueda de filtros de 4 posiciones, con todos ellos para registrar la banda espectral del sodio en estrechas longitudes de onda (588.70, 589.06, 589.42 y 589.78 nm), antes de que la luz entre en el interferómetro Fabry-Perot, que está formado por dos etalones, uno tras otro. Antes de llegar a ellos, una unidad colectora, una unidad de colimación de la luz, y un divisor de haz dicrótico (desvía una pequeña parte de la luz al Sensor de Objetos Brillantes, para actuar el espejo de escaneo para proteger el sistema), y tras salir de los etalones (estrechando todavía más la longitud de onda), pasa a una unidad de enfoque, y al sensor, una unidad de Pixels Activo tipo CMOS de 1024 x 1024 pixels, precedido por un intensificador de imagen (una placa microcanal de dos etapas conectada al APS por una placa de fibra óptica). Cuando opere, aprovechará el movimiento del espejo de escaneo y la propia rotación de la sonda para construir imágenes de todo el disco de Mercurio, para mostrar la cola de
sodio de la exosfera. Y por último, MDM, Monitor de Polvo de Mercurio. Tiene la tarea tan simple como hercúlea de medir la distribución del polvo cósmico en la órbita de Mercurio, y serán los terceros sensores de este tipo en aventurarse tan cerca del Sol. Está formado por una placa base sobre la que se han situado cuatro sensores de 4 x 4 x 2 cm., elaborados en titanato zirconato de plomo, recubiertos con láminas de plata tanto delante como detrás. Actuarán como sensores piezoeléctricos, ofreciendo una superficie activa de 64 cm cuadrados y un campo de visión de 360º horizontal y de 90º hacia el norte y el sur, y soportando cambios de temperatura de entre -160º C y 200º C. Se han diseñado para medir dirección, velocidad, inercia de impacto y densidad del polvo. No se espera demasiado retorno de datos, aproximadamente entre 100 y 200 impactos al año (terrestre). Como es tradicional en las misiones japonesas, MMO ha recibido un nuevo nombre. A través de un concurso, el escogido ha sido Mio. En japonés se refiere a trabajar duro sin rendirse, pero en el japonés original se refiere a vías de agua, basándose en el término mio-tsukushi, antiguos marcadores de navegación tanto en ríos como en mares. Con todo listo, dará un peso en báscula de 255 kg.
Durante la fase de planificación, se estudió la forma de entregar esta carga útil en órbita de Mercurio. Se pensó en mandar las sondas en solitario, y alguna forma de hacerlo en conjunto. Al final, se hará en un único paquete y un solo lanzamiento, por lo que resultan indispensables otros dos elementos. MOSIF, el Escudo
Solar y Estructura de Interfaz de MMO, es lo que su propio nombre indica. Debido a su diseño, construido alrededor de la estabilización por rotación, mantenerse fijo sobre la plataforma de MPO hubiera supuesto mantener uno de los lados de Mio apuntado constantemente al Sol, poniéndola en riesgo. Para evitarlo, se desarrolló este elemento. Se compone de dos componentes. Abajo, está la placa de interfaz. Su misión es unir a MPO y Mio de forma mecánica, eléctrica, y con transmisión de datos, además de disponer de un sistema de eyección para separar este vehículo una vez en órbita marciana. En cuanto al escudo solar, tiene forma cónica, y está truncado 18º para permitir maniobrar todo el conjunto de crucero sin necesidad de iluminar a Mio. La unión entre la placa de interfaz y el escudo solar es mediante unos brazos de soporte que mantienen ambas estructuras unidas. Como MPO, MOSIF también está envuelto en mantas especiales, con una capa exterior de Nextel seguida por siete capas de
titanio separadas por espaciadores de vidrio. Y para terminar, está el MTM, el Módulo de Transferencia a Mercurio. Como ya anunciamos, es el primer módulo SEP en volar al espacio. Equipado con motores iónicos, su tarea es la de entregar a MPO y Mio en las cercanías de Mercurio. También diseñado y construido por la ESA, sigue un diseño similar en cuanto a estructura y protección termal se refiere. Emplea un cono central truncado como soporte de unión a la etapa superior del lanzador, pero también como núcleo estructural. Completamente terminado, casi parece un triángulo tridimensional, pero con la punta cortada, con unas medidas de 3.5 x 3.7 x 2.3 metros. En su interior se ha montado todo lo necesario para que funcione. Por ejemplo, posee su propio sistema energético, empleando dos enormes paneles solares de cinco secciones y trece metros de largo que, una vez desplegados, provocan una envergadura de 30.4 metros, con una superficie activa de 42 metros cuadrados y generando hasta 15 kilovatios de electricidad, suficiente para todos los sistemas de a bordo, y para cargar una batería propia de ión litio. También cuenta con su propio sistema de propulsión químico, del tipo bi-propelante (es decir, combustible y oxidante), con 12 propulsores redundantes, almacenando hasta 157 kg. de combustible a bordo. La protección termal es similar a la de MPO, usando el mismo tipo de mantas multicapa (con pequeña extensiones desde la base, para proteger por un lado el espacio entre MTM y MPO, y por el otro a los motores iónicos), pero también tres radiadores (dos en los laterales y el tercero en el extremo corto) y una red de tuberías para canalizar el calor de deshecho a los radiadores. Pero lo verdaderamente importante de MTM es el MEPS, Sistema de Propulsión Eléctrica de MTM. Será el medio principal de propulsión de a bordo, aunque consideramos más correcto decir de impulsión. Beneficiándose de la experiencia recogida con SMART-1, se ha diseñado un sistema altamente eficiente para poder llevar a BepiColombo en ruta hacia su destino. MEPS está formado por los motores iónicos, mecanismos pivotantes, tanques de combustible y sistemas de alimentación, y la unidad de procesado de energía. Básicamente, es muy similar al sistema que se emplea en los motores NSTAR de la NASA, en vuelo todavía con Dawn. Reforzando el
parecido, están los motores. Se les conoce como motores T6, construidos por la firma británica QinetiQ, y son del mismo tipo que los NSTAR. Solo hay una diferencia fundamental entre ellos: en vez de emplear imanes en la cámara de descarga, emplea solenoides para generar el campo magnético en el interior. No afecta al funcionamiento, ya que se ha demostrado que es un sistema igual de eficiente. Su diámetro es de 22 cm, y puede proporcionar una gama de empuje de entre 75 y 145 milinewtons, por los 92 del NSTAR a máxima potencia. Este T6 es una versión aumentada del T5 de 10 cm que voló con éxito en la misión terrestre GOCE. Cada motor tiene su propio dispositivo pivotante, permitiendo ajustar el vector de empuje de manera óptima. En total, dispondrá de 581 kg. de xenón para alimentar a los motores. Otra diferencia es que carecen de ordenador de control, esta función está empotrada en el software de control de actitud de MPO. Un último componente de MTM son un pequeño conjunto de "webcams", tal vez instaladas para verificar el despliegue de los paneles solares, y con el potencial de obtener imágenes, de baja resolución, eso sí, de la Tierra, Venus y Mercurio durante los sobrevuelos. Con todo junto, se forma el
MCS, la Sonda Compuesta a Mercurio, con el MTM como base, MPO en el centro, y Mio, dentro del MOSIF, en la parte superior, formando con ello un conjunto de 3.9 x 3.6 x 6.3 metros y con un peso en Tierra de 4100 kg.
Si el proyecto se ha ido demorando ha sido por la dificultad de desarrollar algunos elementos para la protección contra el calor, pero el peor ha sido el problema con el sustrato para los paneles solares de MPO y MTM. Con las células no había problema, pero sí con el material sobre las que deberían ir. El sustrato originalmente escogido se demostró que no sería capaz de aguantar el intenso calor en las proximidades de Mercurio, y hubo que buscar un sustituto, y solo eso ya retrasó todo el programa un año, como mínimo. Esto también resultó ser un problema para el proyecto Solar Orbiter, que emplea tecnología heredada de BepiColombo. Los problemas se resolvieron, y está a punto de ser lanzada (no en el caso de la misión solar, que debe esperar hasta el 2020).
Para poner tanta masa camino de Mercurio se necesita potencia, y el cohete escogido no lo puede ser más: el Ariane 5-ECA. El principal lanzador europeo, con 100 misiones a sus espaldas, vuelve a enviar una misión interplanetaria al espacio desde Rosetta, allá en el 2004. Formado por una enorme primera etapa propulsada por el motor criogénico Vulcain, y apoyado por dos aceleradores de combustible sólido (recuperables), será seguido por una segunda etapa con potencia suficiente para la tarea. El despegue se producirá desde la plataforma ELA-3 del CSG, el Centro Espacial de la Guayana, situado en Kourou, Guayana Francesa, el 20 de octubre. Tras 28 minutos de proceso, BepiColombo comenzará su largo camino hacia el primer planeta.
Tras la separación, como suele ser habitual, toca la extensión de los diversos apéndices, aunque no para Mio. Primero los paneles solares de MTM, y luego el panel y los mástiles de MPO. Durante tres meses, estos dos componentes recibirán extensas pruebas para verificar que todo está en buen estado, antes de iniciar la ruta hacia Mercurio bajo impulsión iónica. Como el MCS, todo el control estará centrado en MPO, recibiendo y ejecutando comandos, transmitiendo telemetría (siempre vía la antena de media ganancia), gestionando la actitud triaxial del conjunto, operando la impulsión iónica. De la producción energética de todo el paquete se encargarán los paneles del MTM, ya que el de
MPO se encontrará durante todo el crucero mirando de perfil hacia el Sol, para evitar degradación en las células. En cuanto a Mio, se encontrará generalmente bajo hibernación, y cada seis meses será despertado para recibir comprobaciones de que todo se encuentra en buen estado, siempre por vía de MPO. La impulsión iónica en BepiColombo hará las veces de las Maniobras de Espacio Profundo en MESSENGER, pero también realizará sobrevuelos planetarios que le permitirán perder más velocidad y cambiar su órbita para reformarla y hacerla parecida a la de Mercurio, tanto en forma como en inclinación. El viaje durará 7.2 años, y junto los distintos segmentos de impulsión iónica (más de 20, con duraciones superiores a los 150 días, empleado como máximo dos de los motores iónicos), completará nueve sobrevuelos planetarios: uno a la Tierra (13 de abril del 2020), dos a Venus (16 de octubre del 2020 y 13 de agosto del 2021) y seis a Mercurio (2 de
octubre del 2021, 23 de junio del 2022, 20 de junio del 2023, 5 de septiembre y 2 de diciembre del 2024, y 9 de enero del 2025). Al final, llegará la inserción orbital el 5 de diciembre del 2025. Semanas antes de la inserción orbital, MTM será expulsado, habiendo cumplido ya su misión, por lo que lo demás correrá a cargo de MPO, usando sus propulsores químicos para entrar en órbita. Durante los sobrevuelos, las oportunidades de ciencia serán escasas. Las imágenes vendrán de las "webcams" de MTM, mientras que algunos instrumentos de MPO (MPO-MAG, PHEBUS y MERTIS, a través de su puerto espacial), e incluso alguno de Mio, recogerán datos en los sobrevuelos y durante el crucero. Por lo demás, la etapa de crucero será relativamente tranquila.
La órbita de captura inicial será enorme, de 674 x 178.000 km., desde la cual todo el paquete restante iniciará el descenso hasta sus órbitas definitivas. Mioserá liberado en una órbita polar elíptica de 590 x 11.640 km., para sus estudios magnetosféricos. Liberada del MOSIF rotacionalmente, esto ayudará a desplegar sus mástiles y antenas, al tiempo que la separación activa el ordenador de a bordo y el resto de sistemas. Mientras, MPO, aún con el MOSIF acoplado, seguirá maniobrando, hasta alcanzar una altitud segura para soltarlo, en una orientación también segura. Ya libre de toda masa innecesaria, MPO alcanzará su órbita definitiva, también polar, aunque menos elíptica que la de Mio, de 480 x 1500 km., con un perigeo, para ambas sondas, localizado aproximadamente en los 16º latitud norte, a diferencia de MESSENGER,
que lo tenía en el polo norte. Las trayectorias de ambas sondas alrededor de Mercurio es lo que se conoce como órbitas casi coplanares, es decir, que aunque comparten inclinación y paso por el perigeo, sus parámetros orbitales son distintos. Todo hay que decirlo, en una etapa temprana del desarrollo de la misión, se decidió porque fueran coplanares, pero se optó por perigeos separados. Si todo va como está previsto, la fecha de llegada a órbita definitiva para MPO será el 14 de marzo del 2026, tras lo cual iniciará la verificación de todos los sistemas, incluyendo sus instrumentos.
En caso de que no surjan problemas en esta etapa, la tarea primaria de estas dos sondas será de un año terrestre, y si su funcionamiento sigue siendo bueno, podrá ser ampliada, al menos un año. Durante todo el tiempo que trabajen en Mercurio, tratarán de responder varias cuestiones: El origen y la evolución de un planeta próximo a su estrella; la estructura interior y la composición del planeta; las características y origen de su campo magnético interno; los procesos superficiales, como la craterización, el vulcanismo, los depósitos polares y la tectónica; la estructura, dinámica, composición y origen de la exosfera de Mercurio; la estructura y la dinámica de la magnetosfera de Mercurio; y estudios de la Teoría de la Relatividad General de Einstein, partiendo de la órbita y de la posición de MPO en torno a Mercurio.
No haría falta decirlo, pero BepiColombo es mucho más completa que MESSENGER, e irá más allá en muchas de sus indagaciones, proporcionando, no cabe duda, observaciones insospechadas, nuevos misterios y, esperemos, mucho interés. Pero como ocurrió con MESSENGER, toca armarse de paciencia porque, hasta que llegue, pasará sin duda un buen rato. Es la única manera económica de hacerlo. Mercurio nos espera. Suerte.


.jpg)
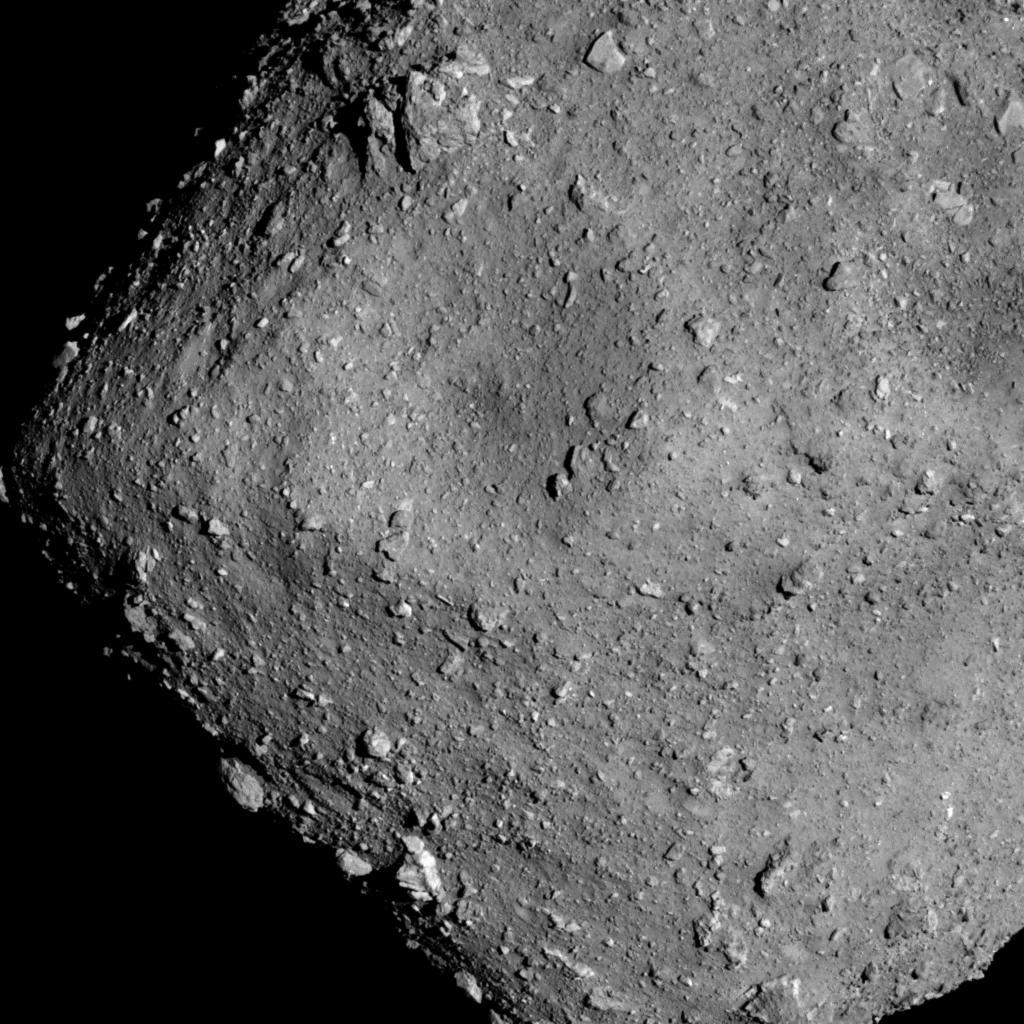
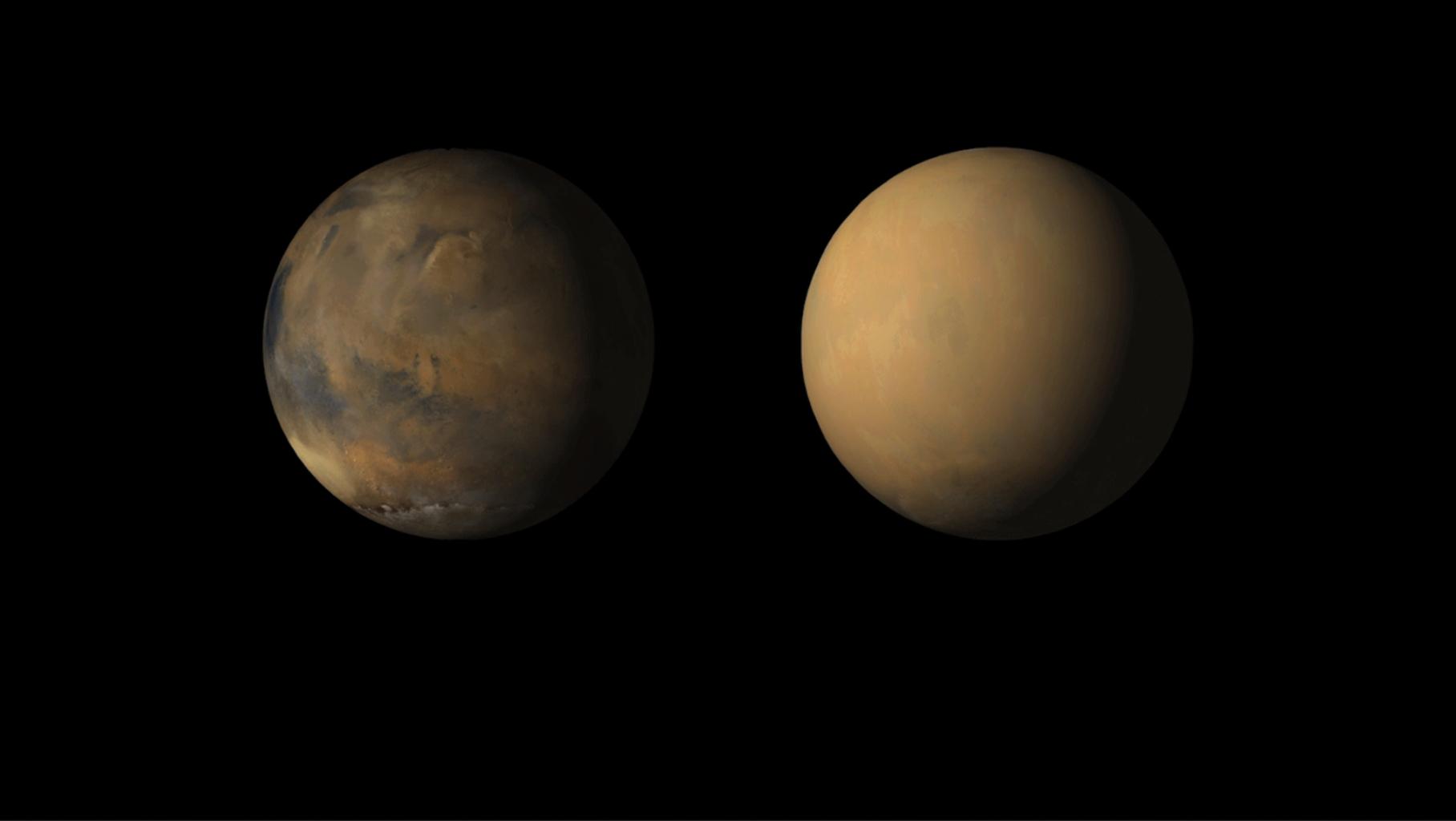
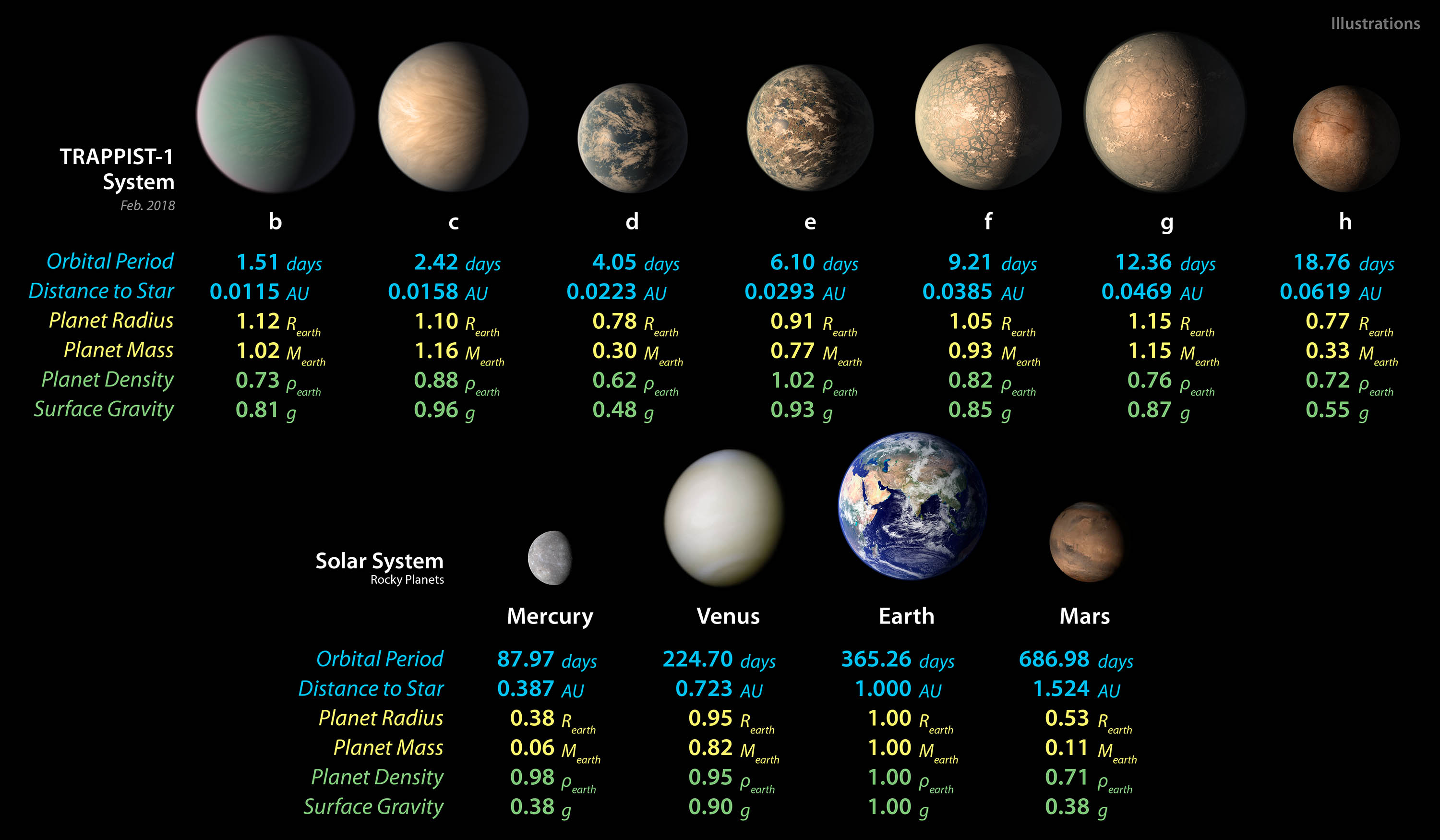
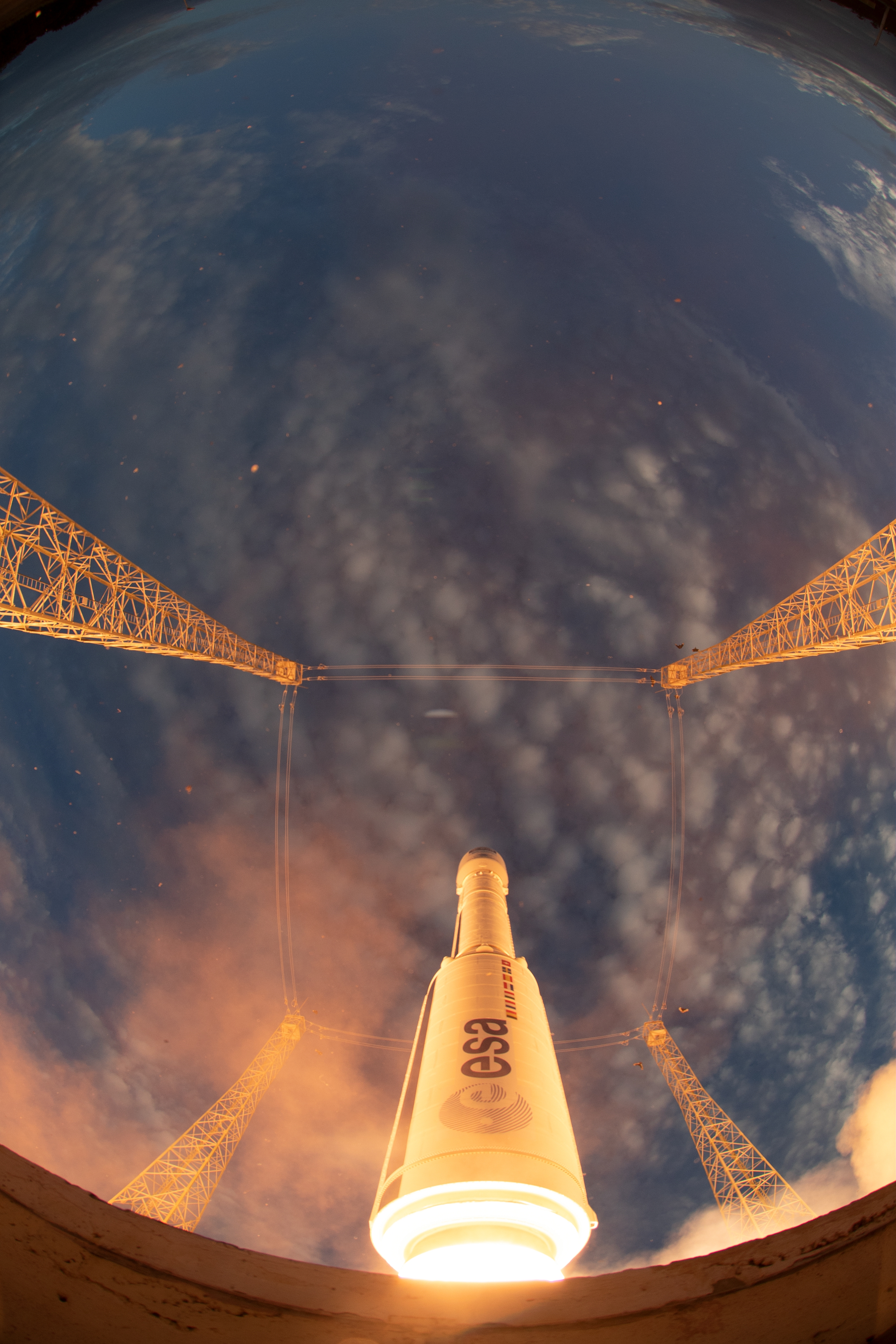








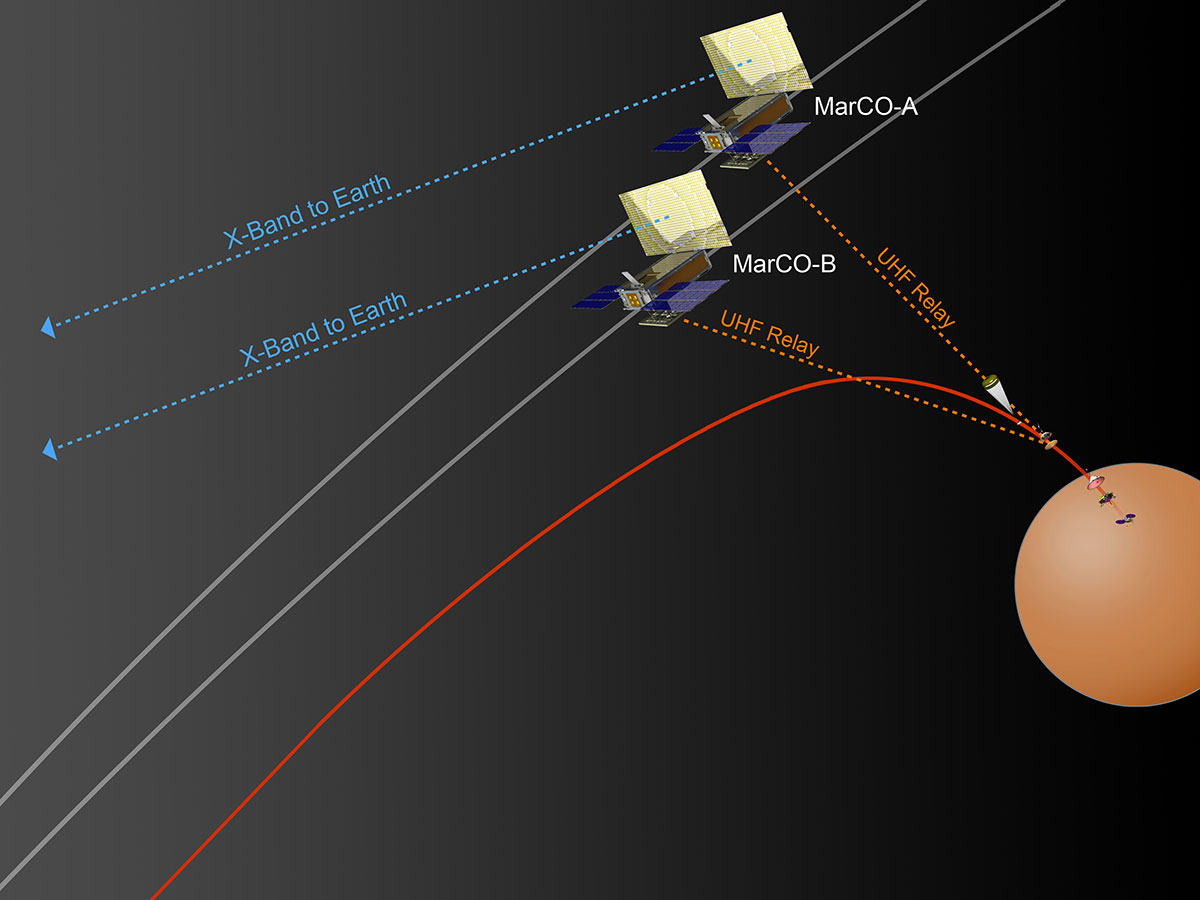

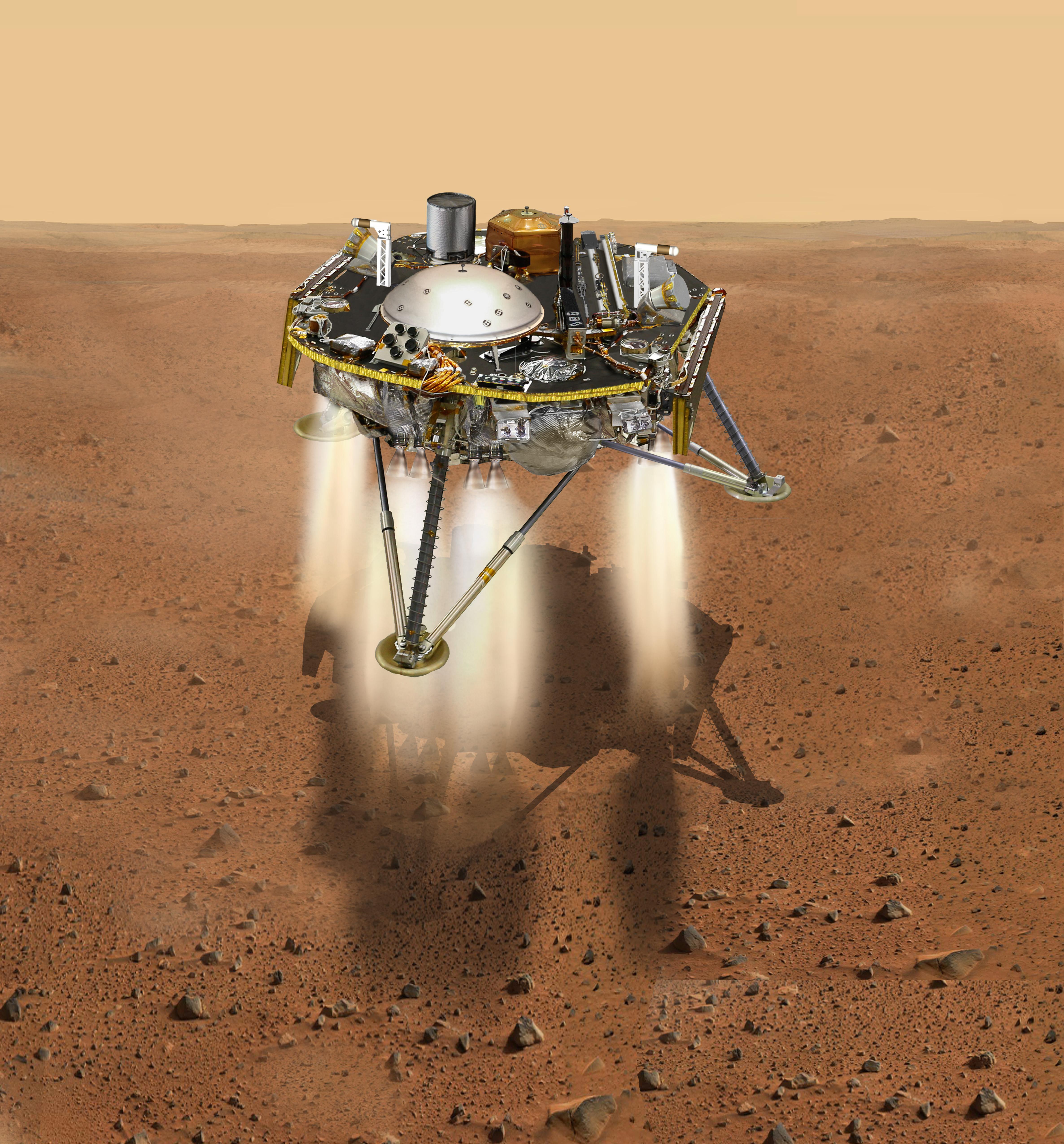
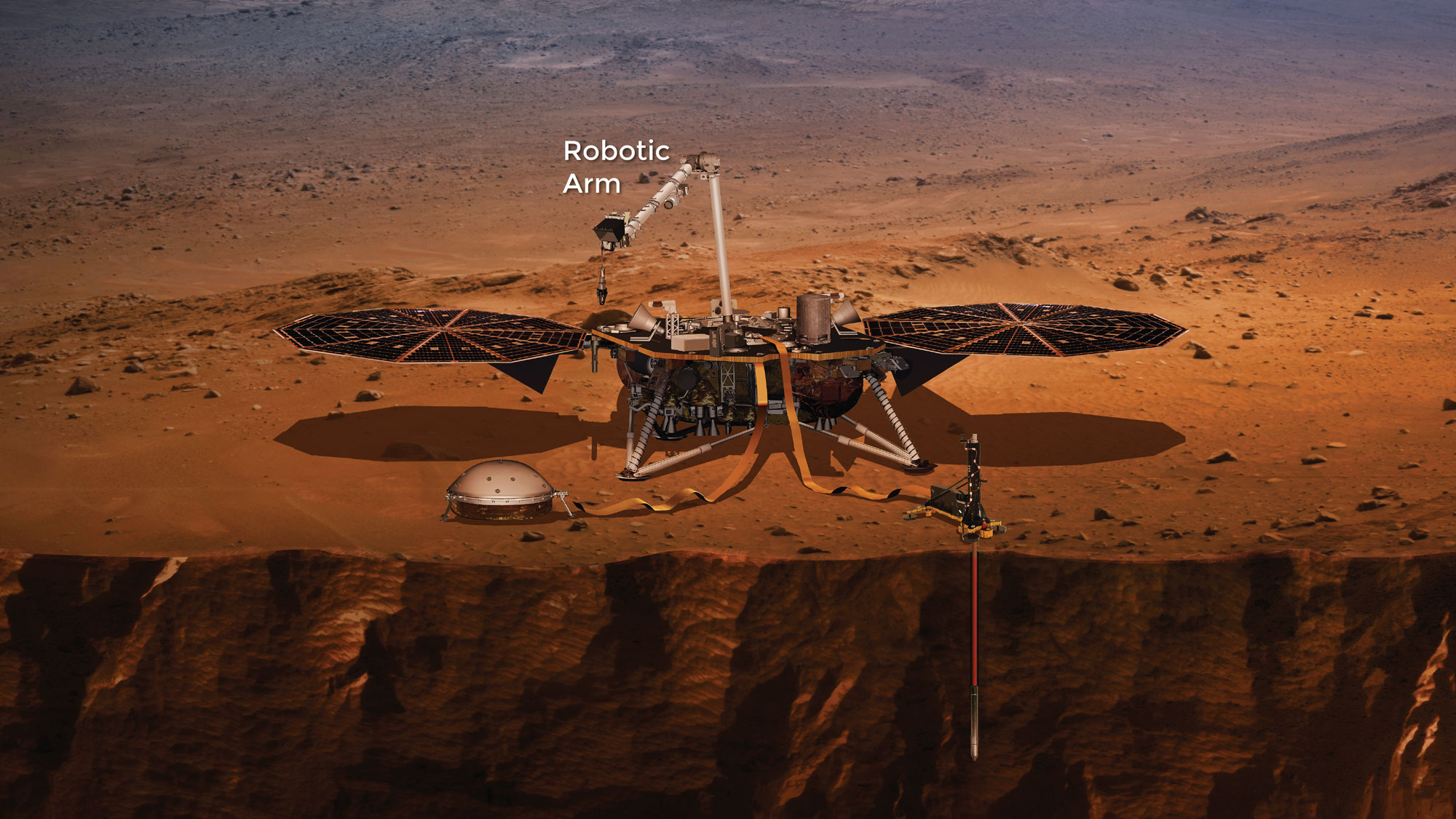
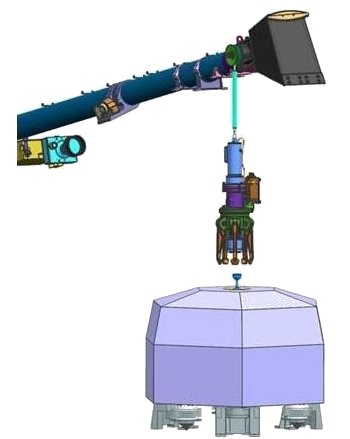


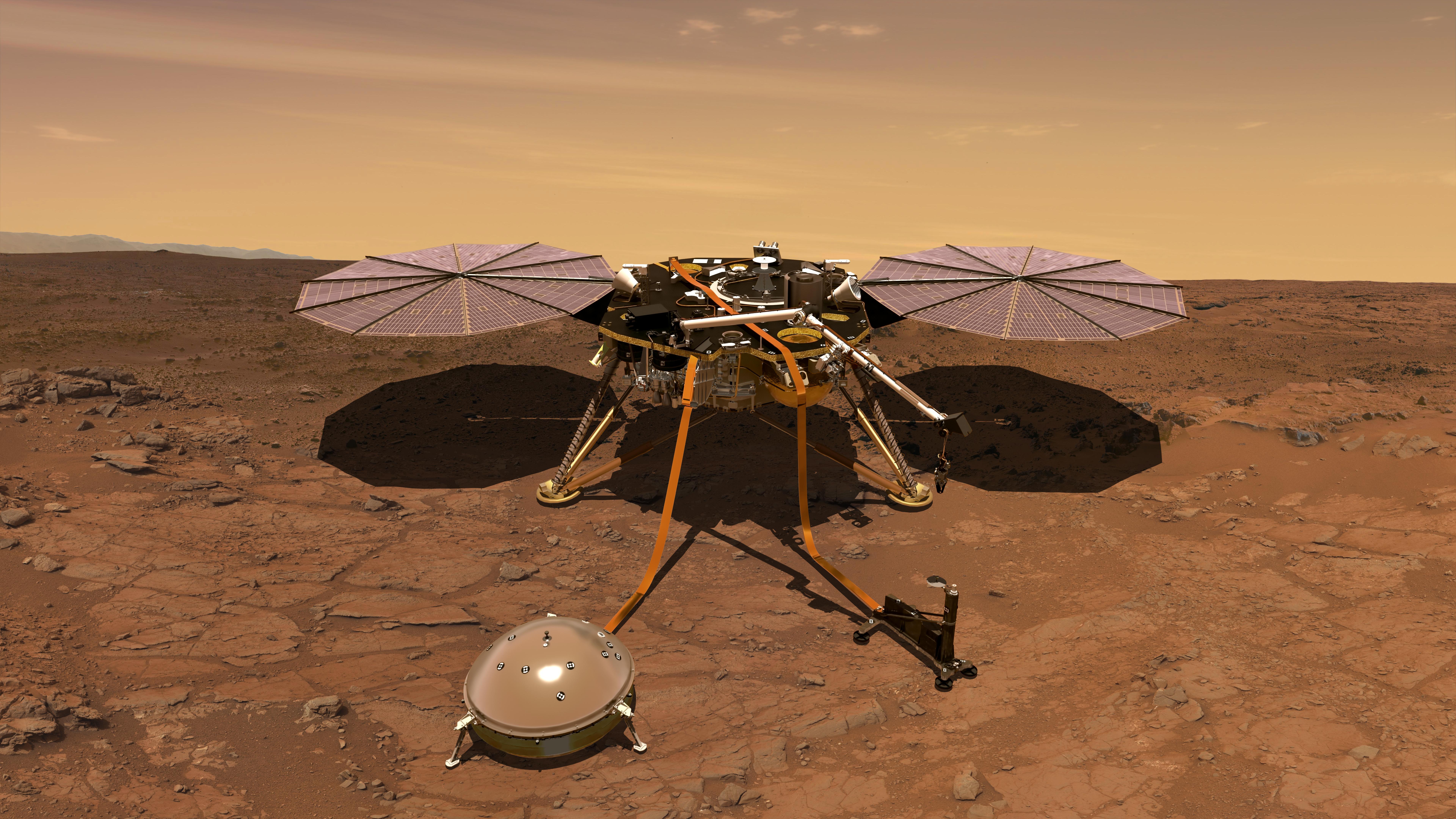
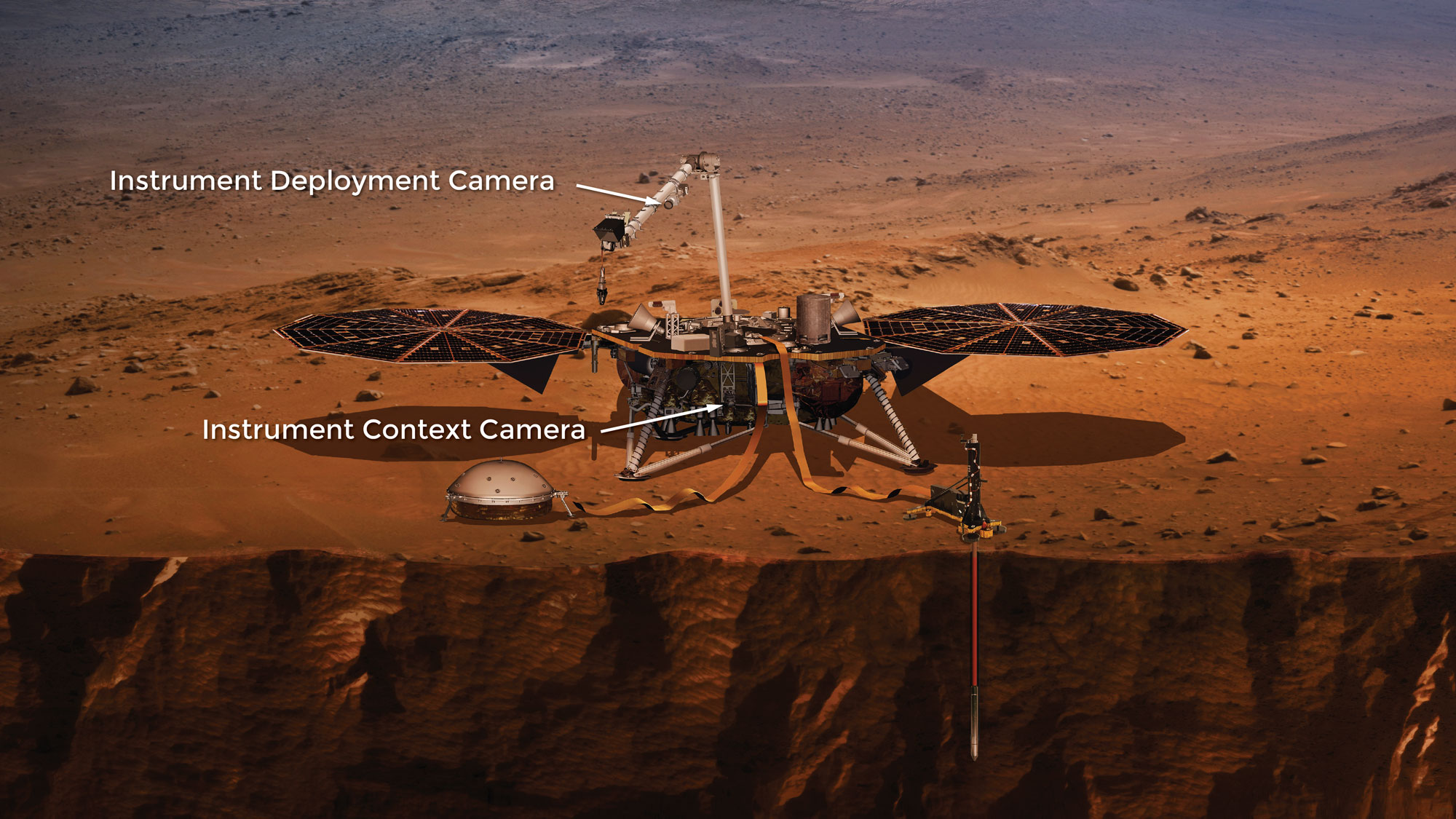




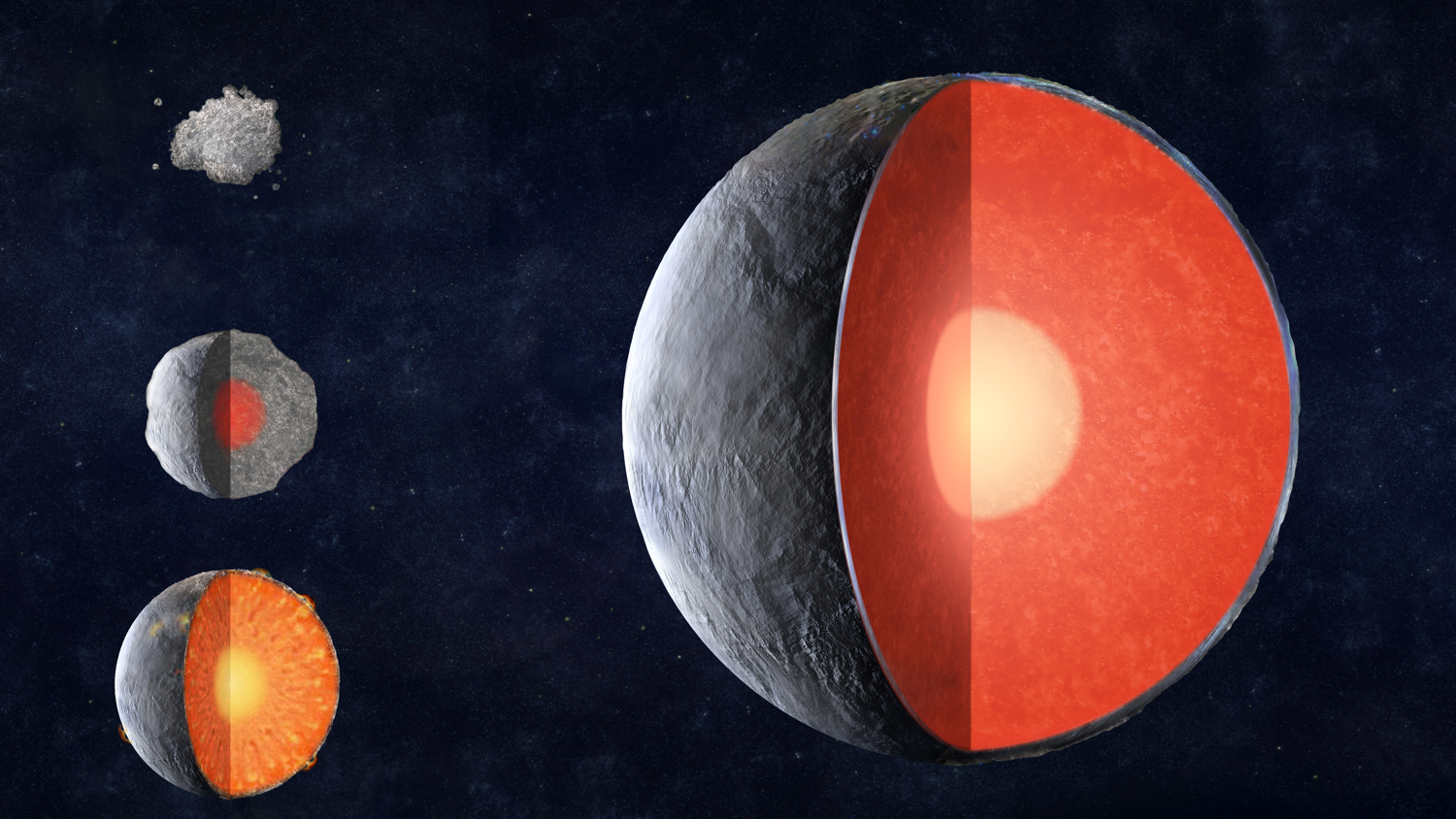



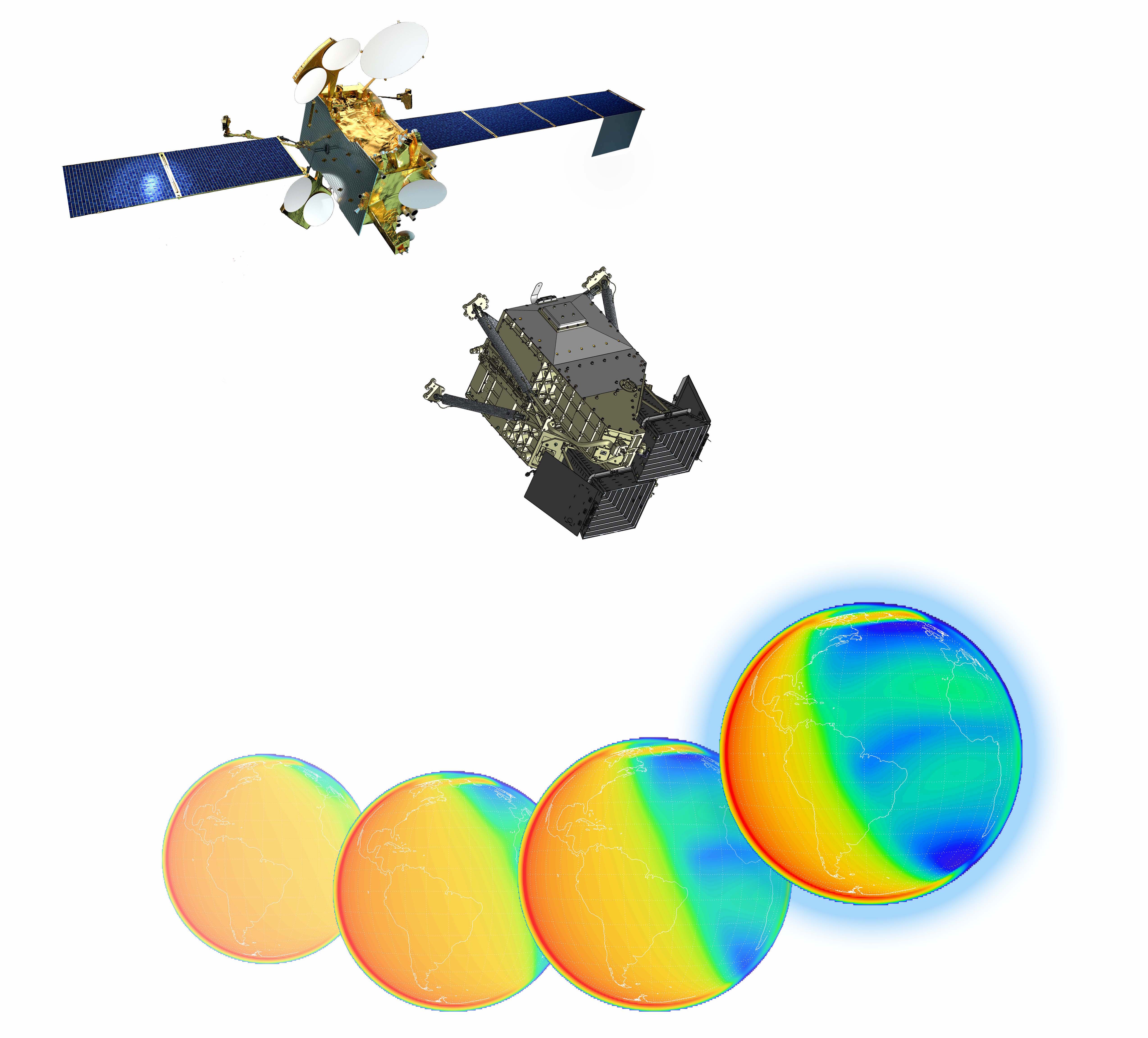
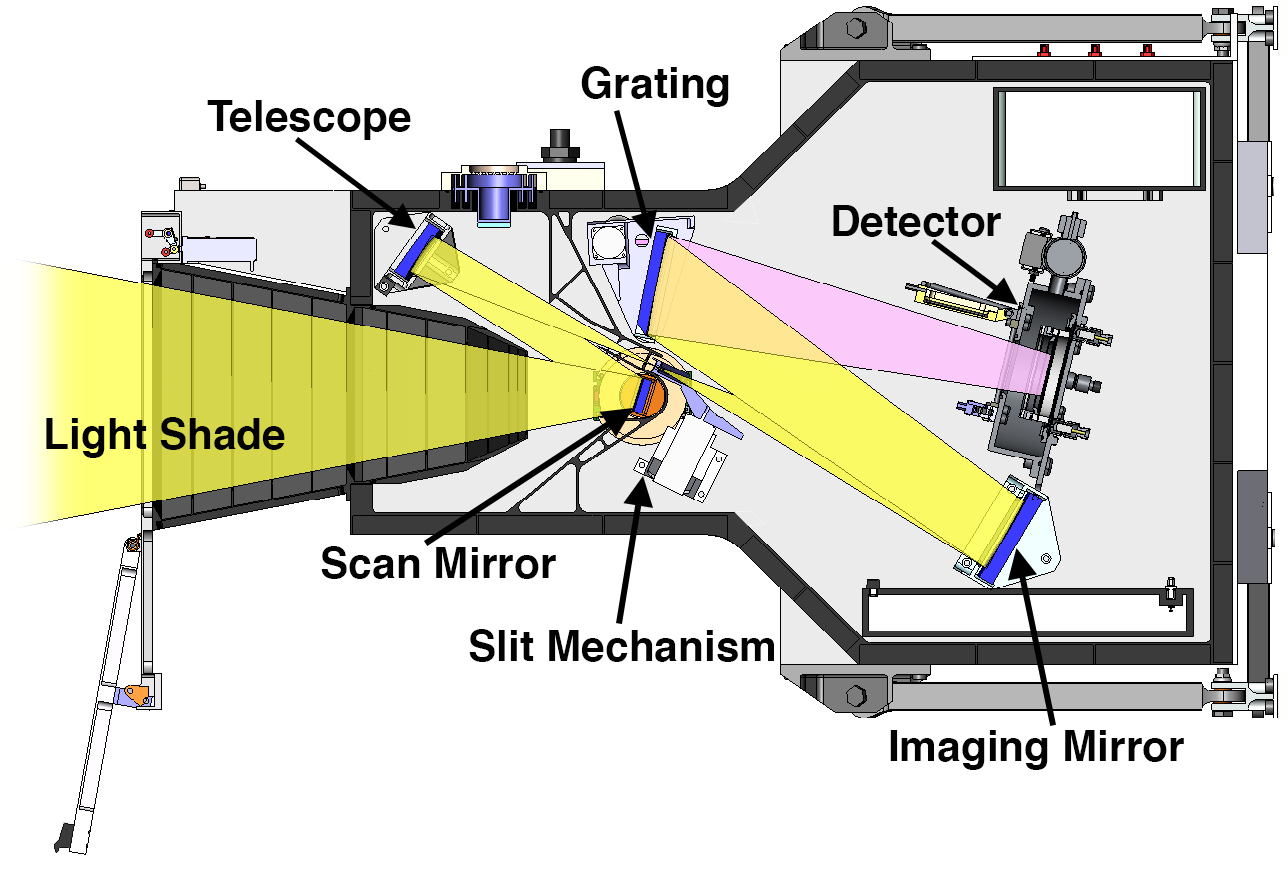

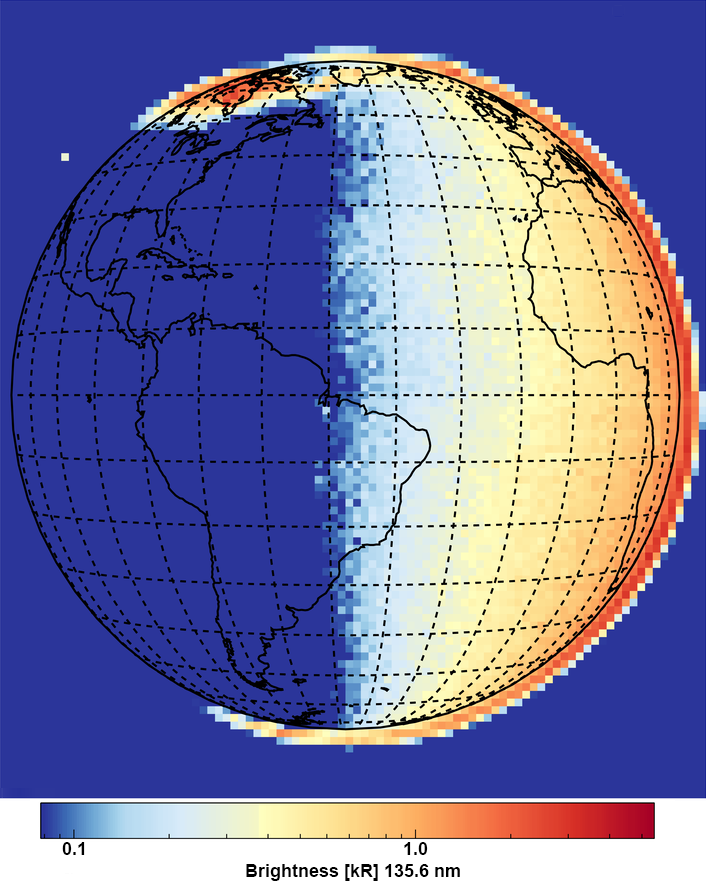



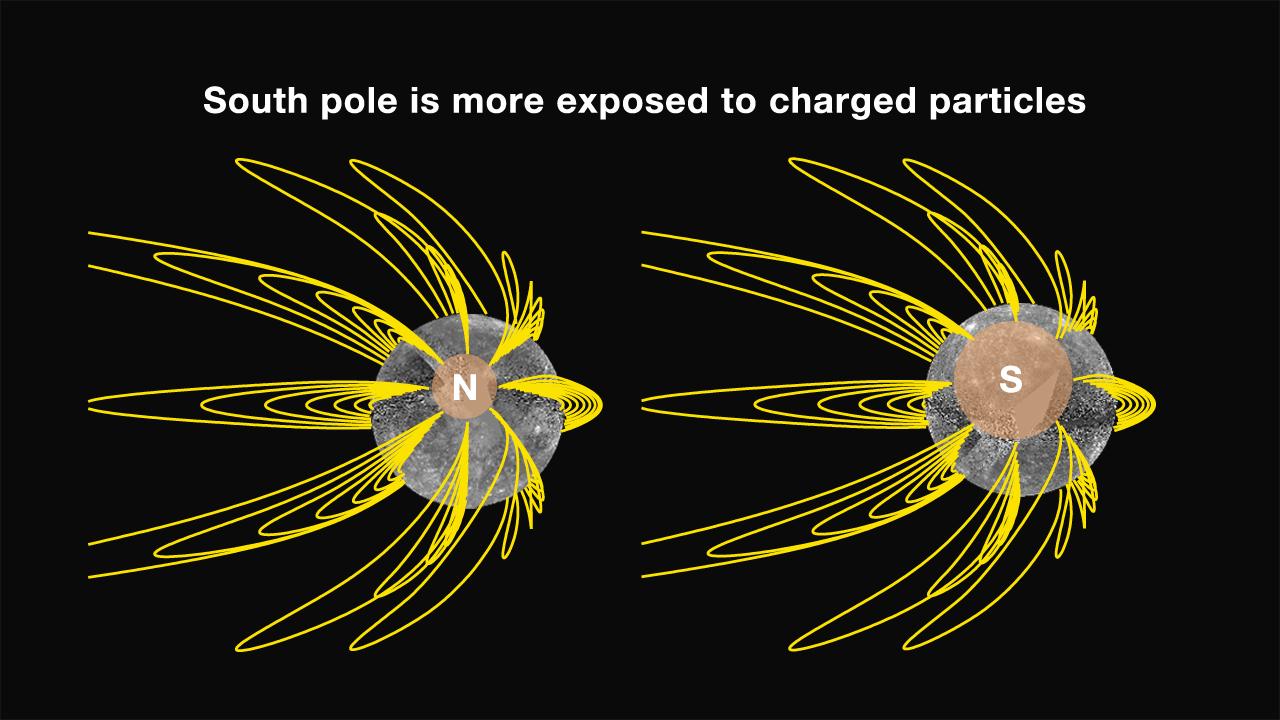

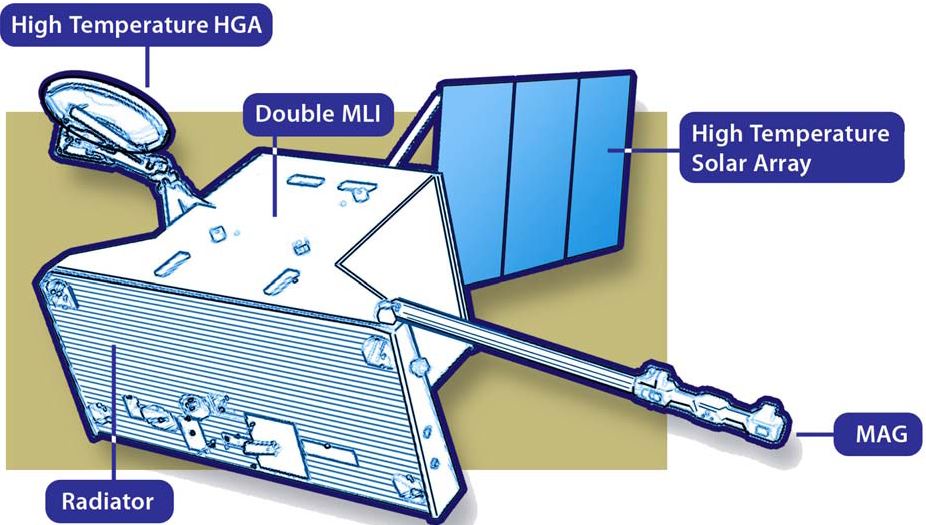
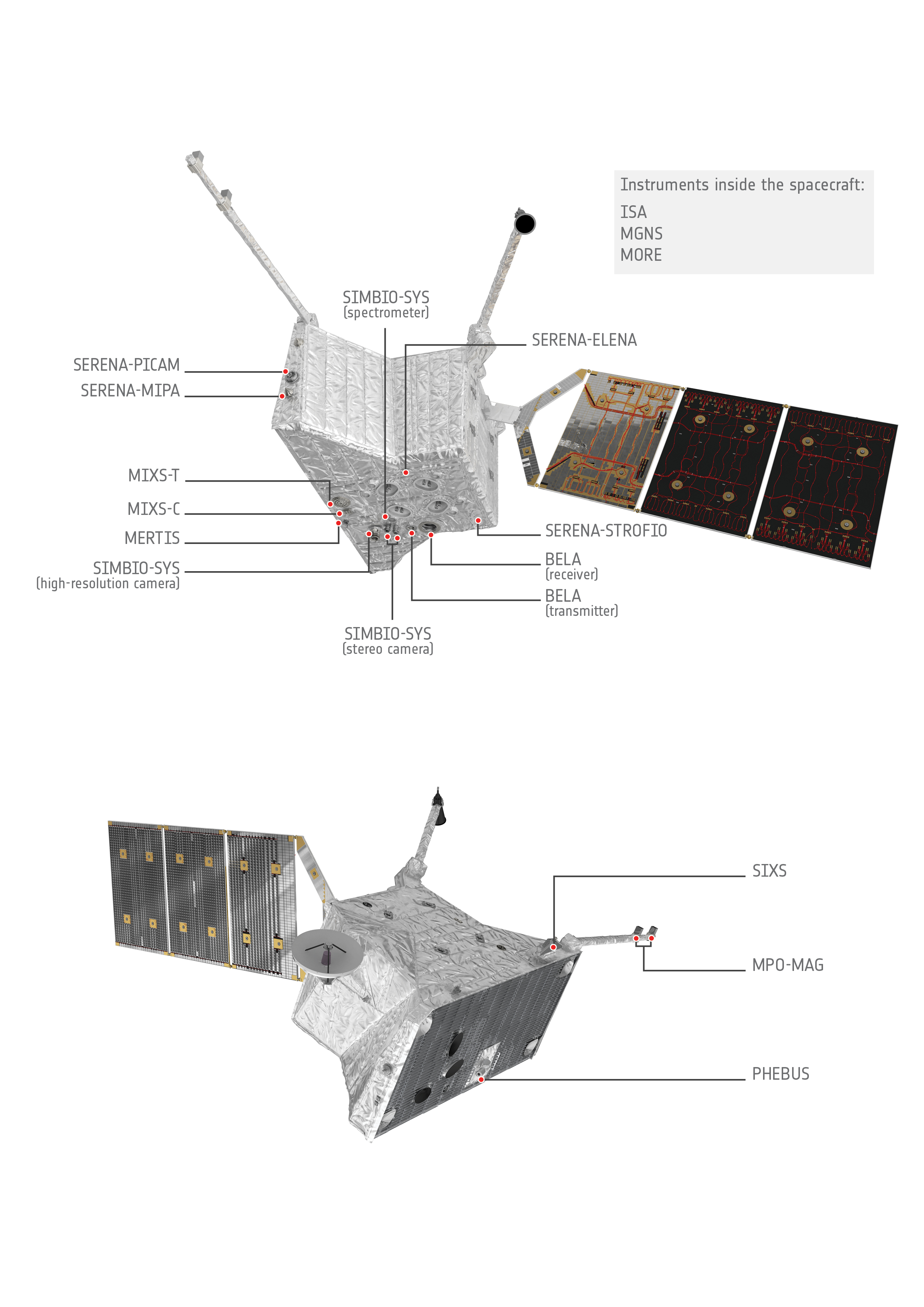
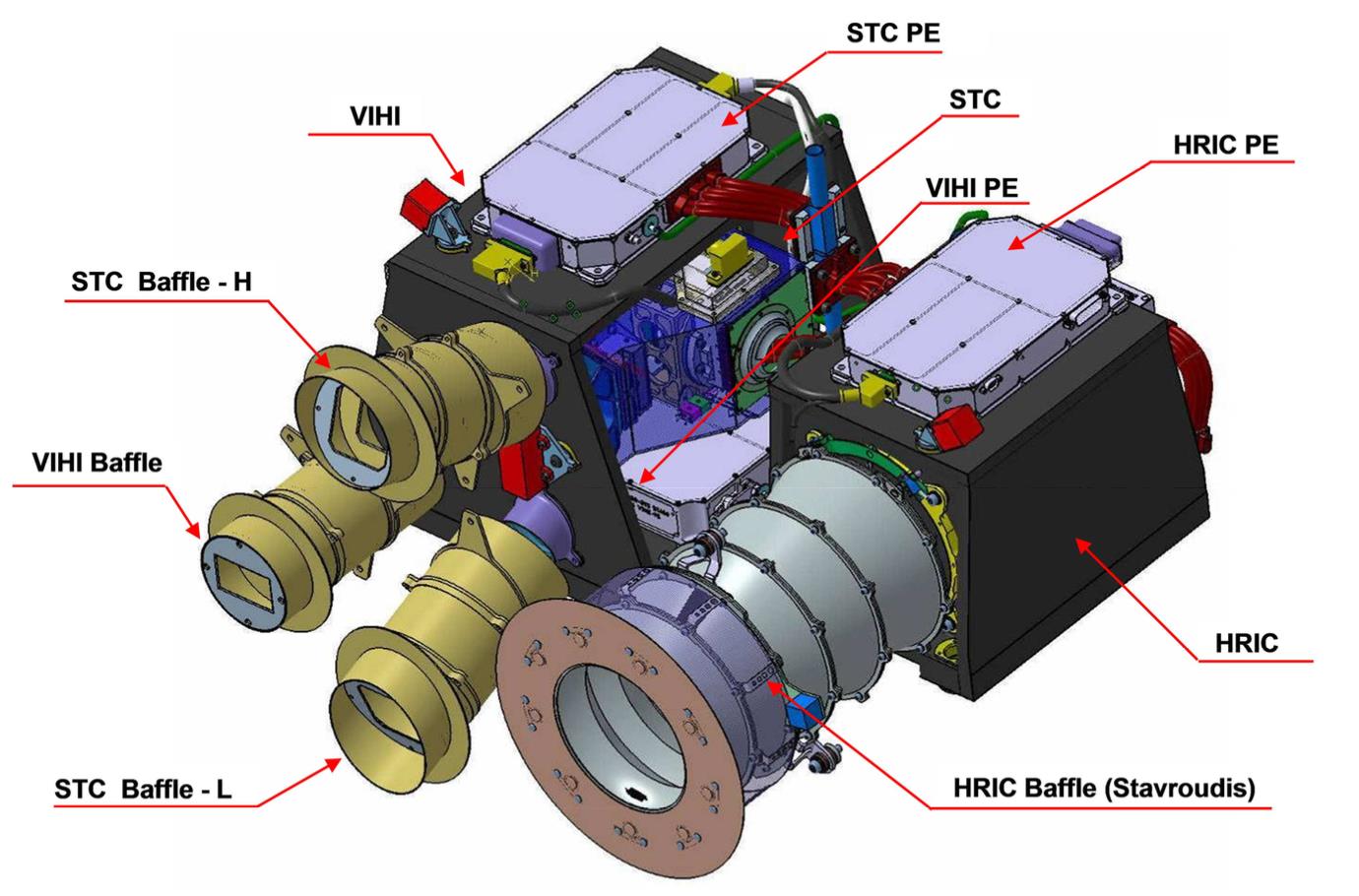
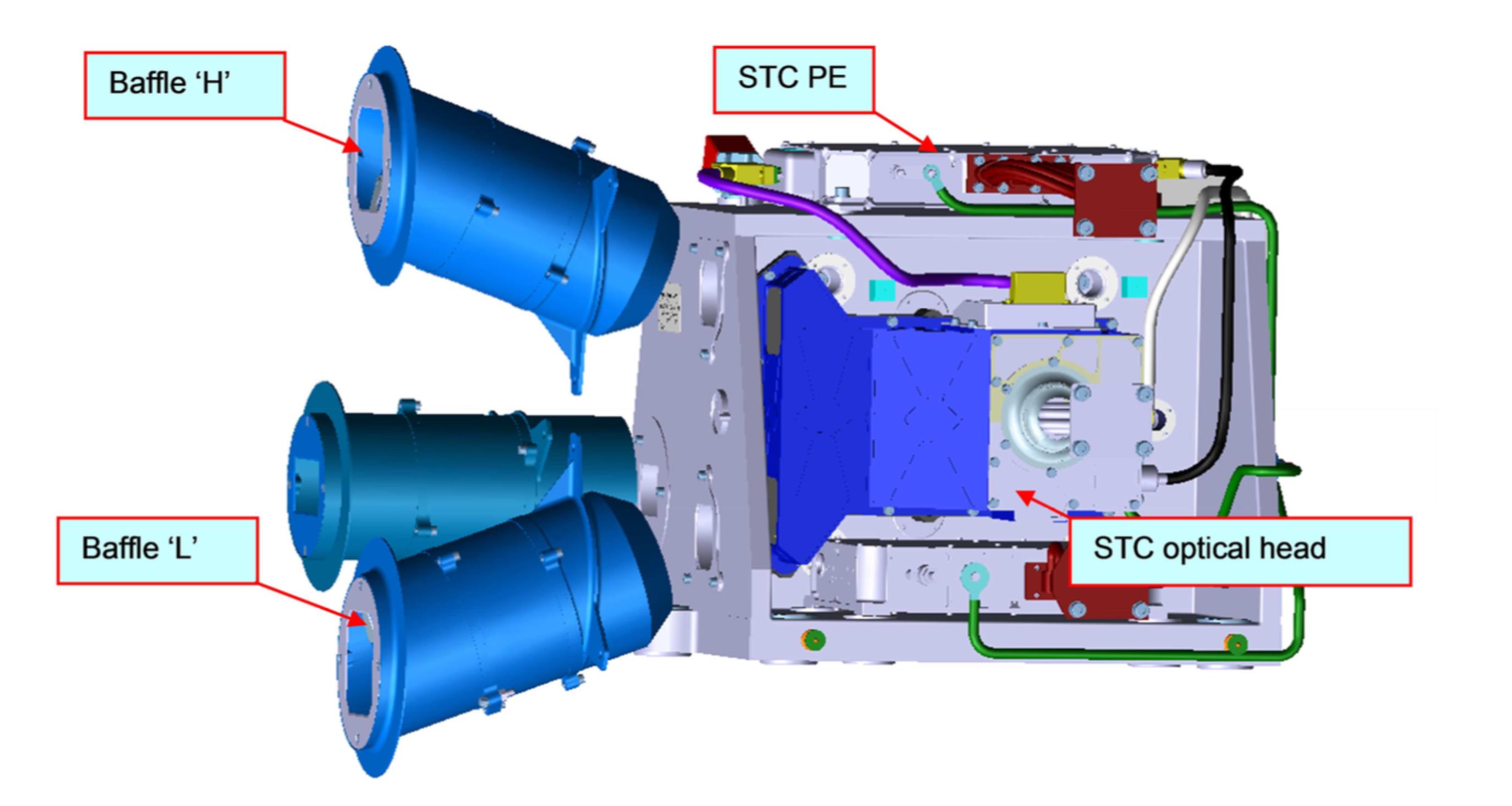
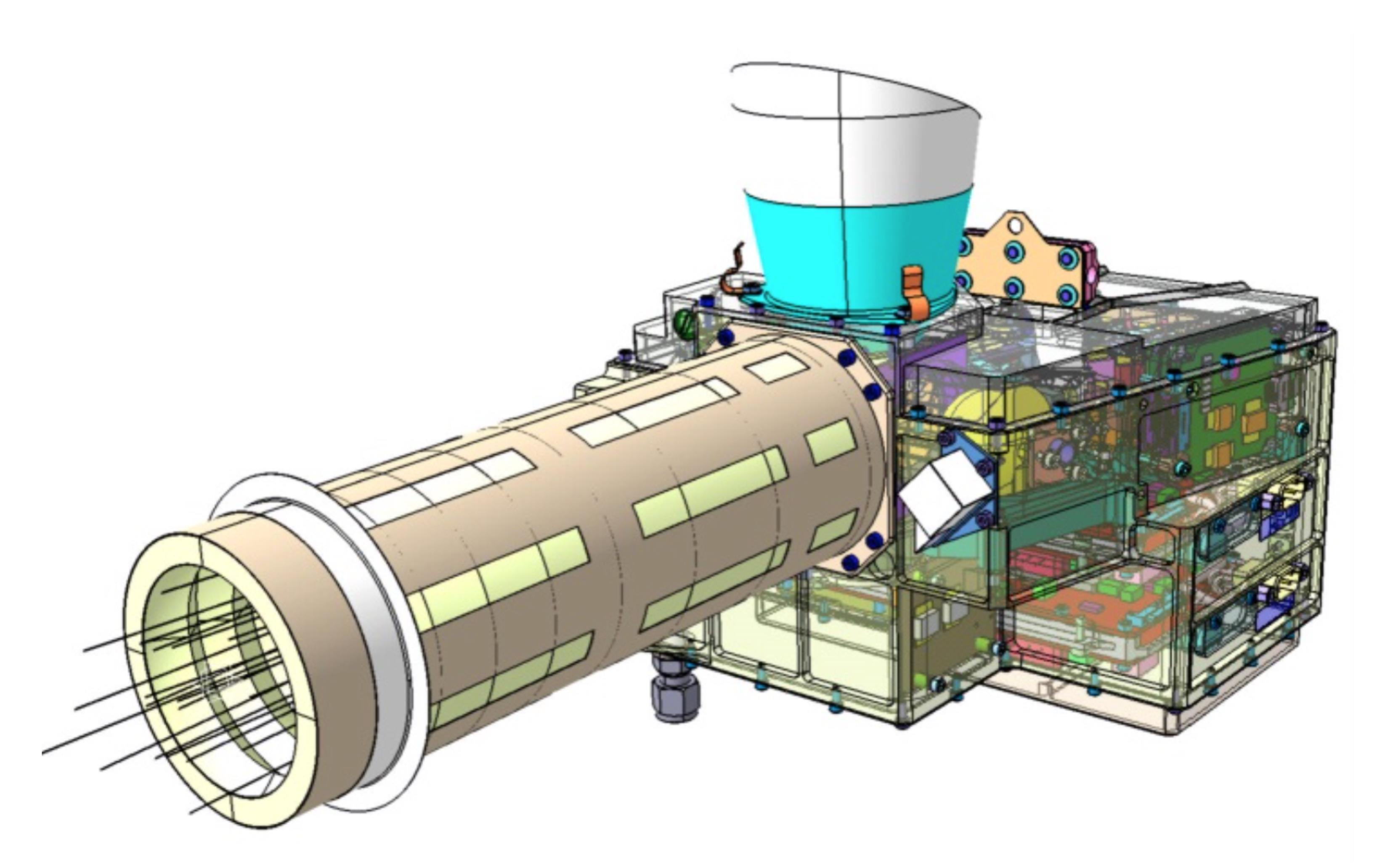
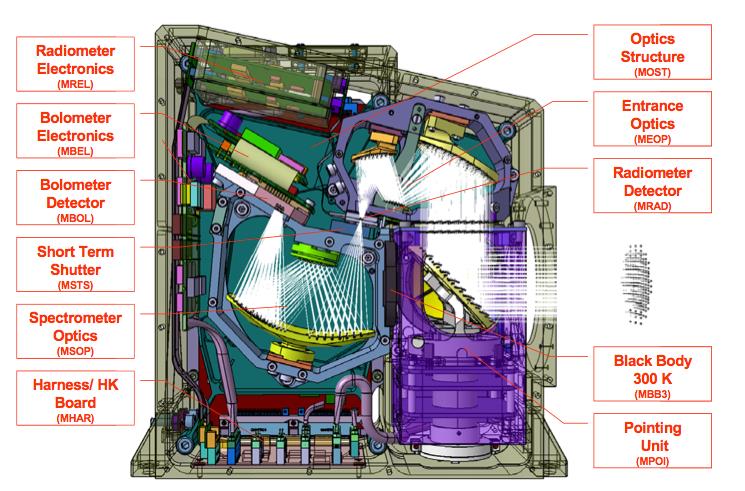
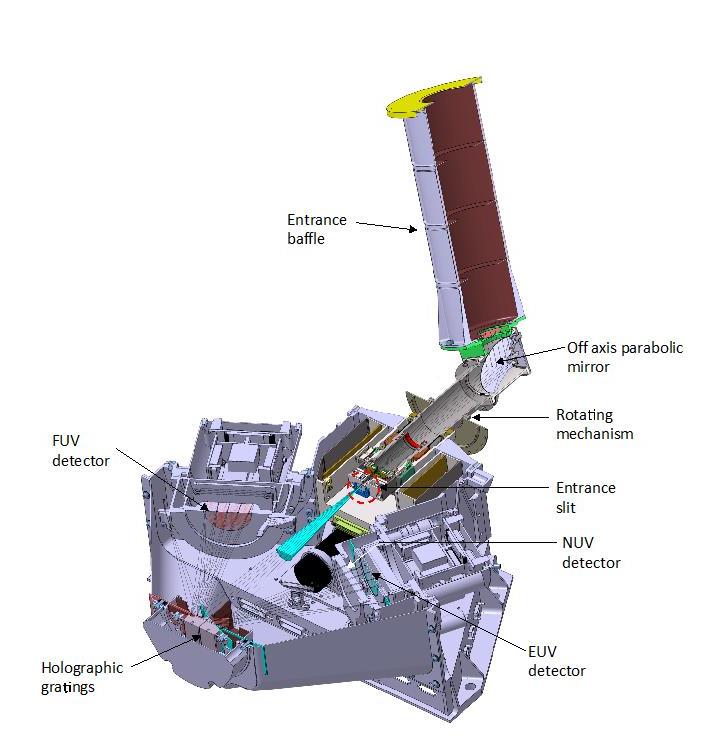
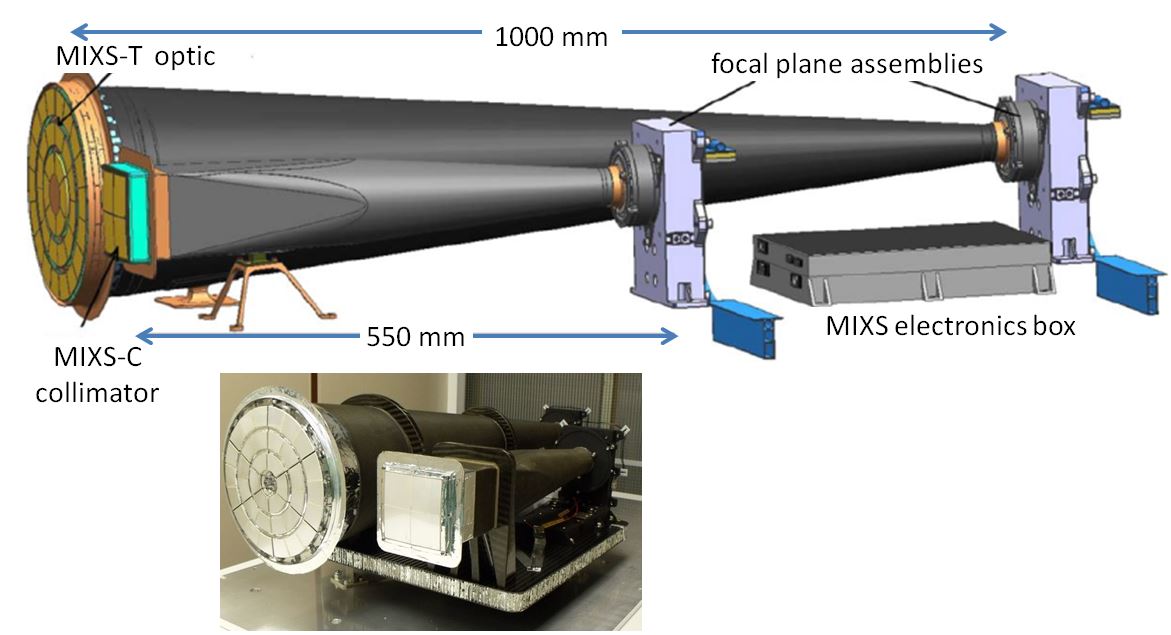
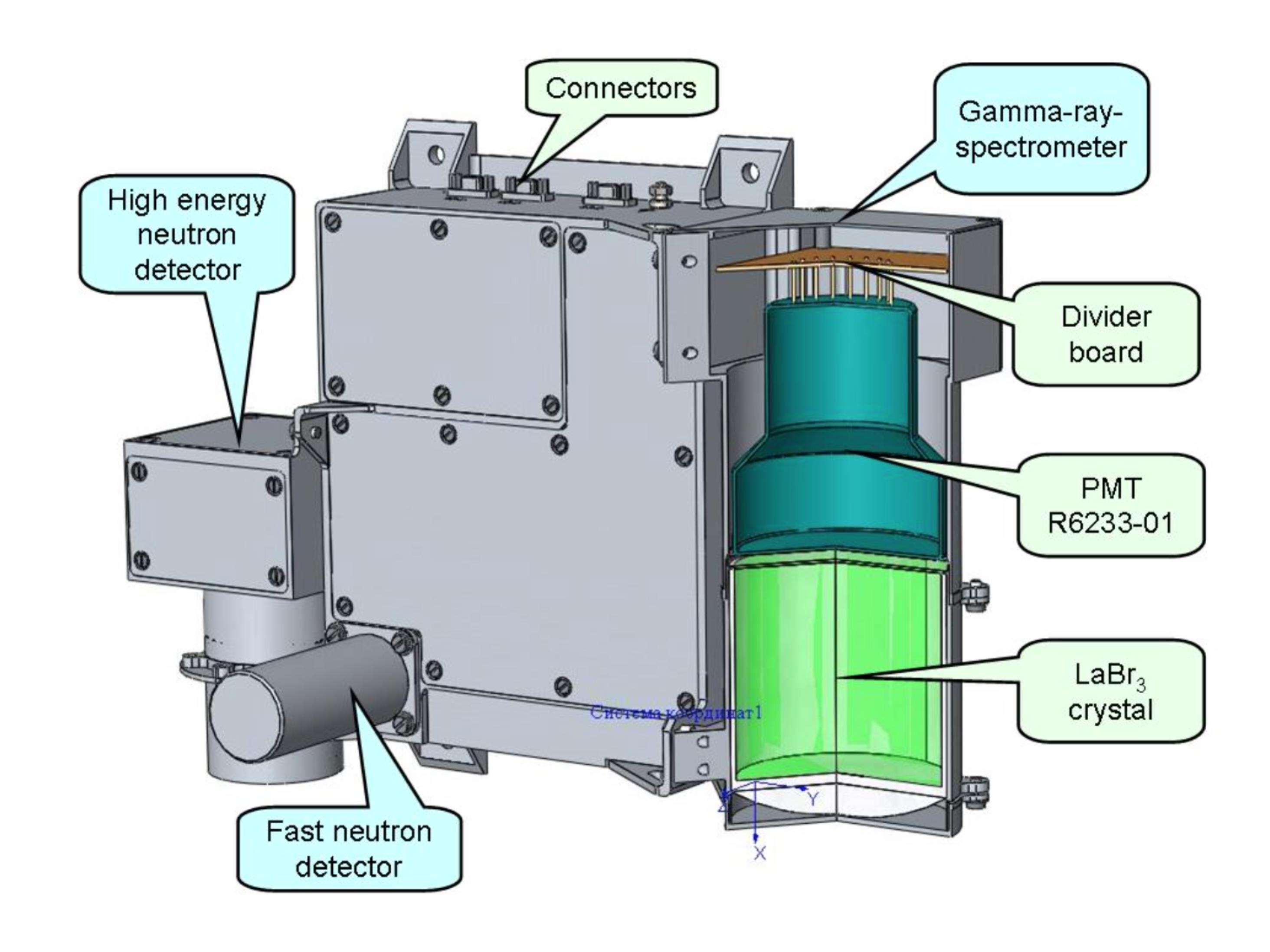
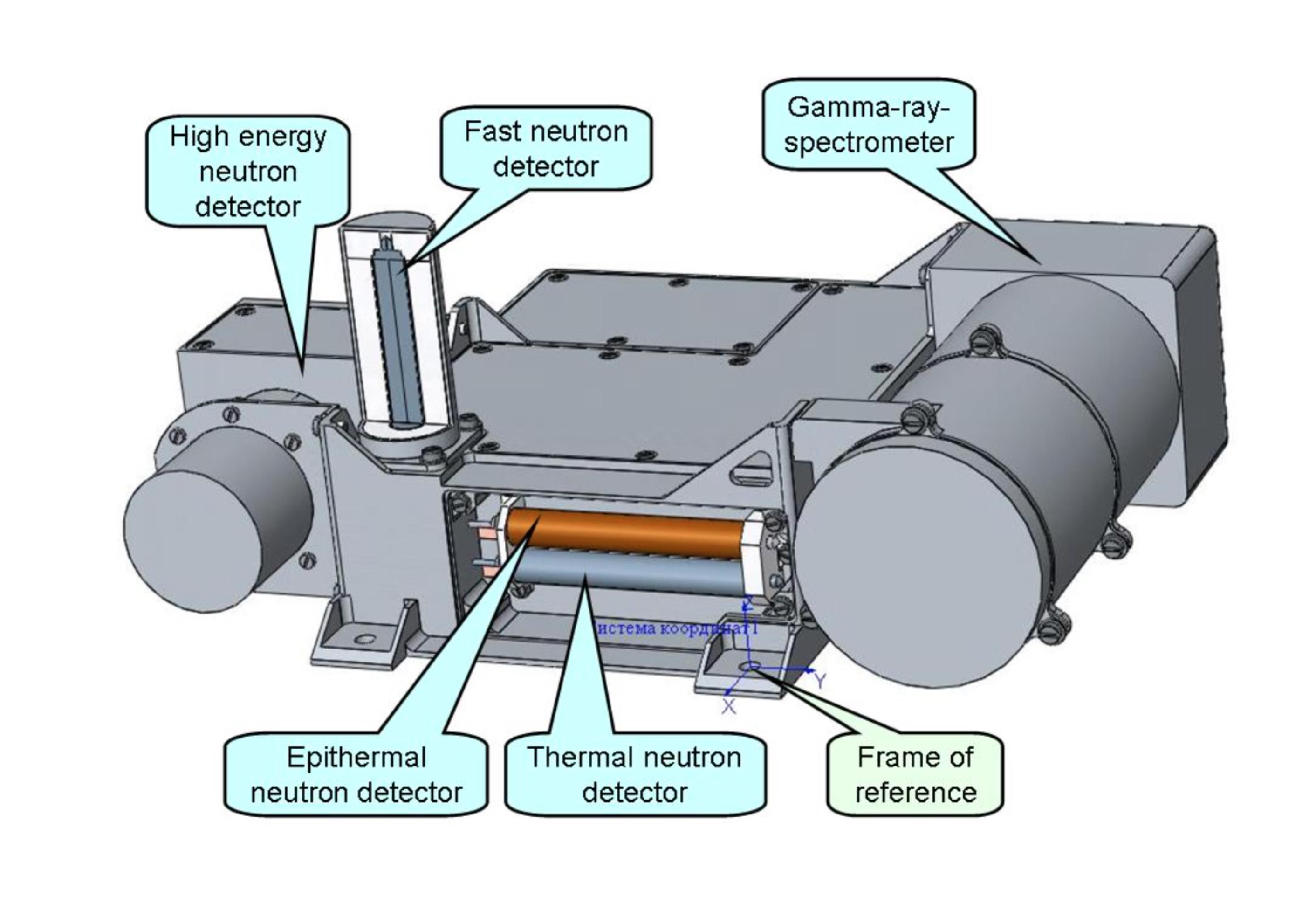
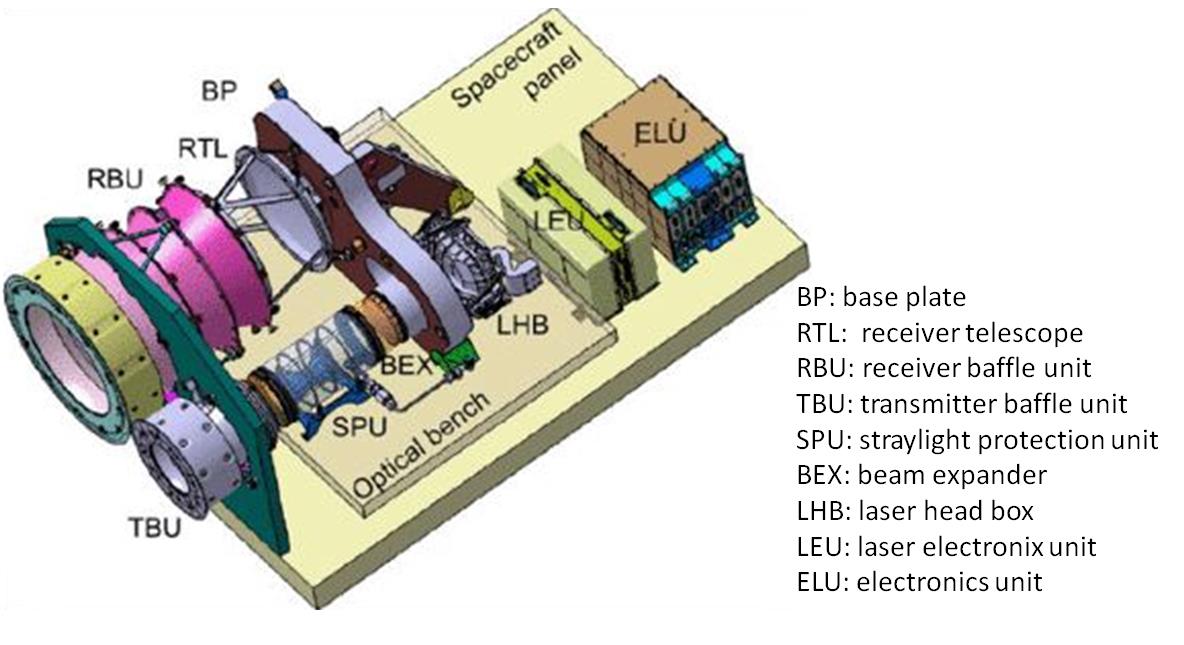
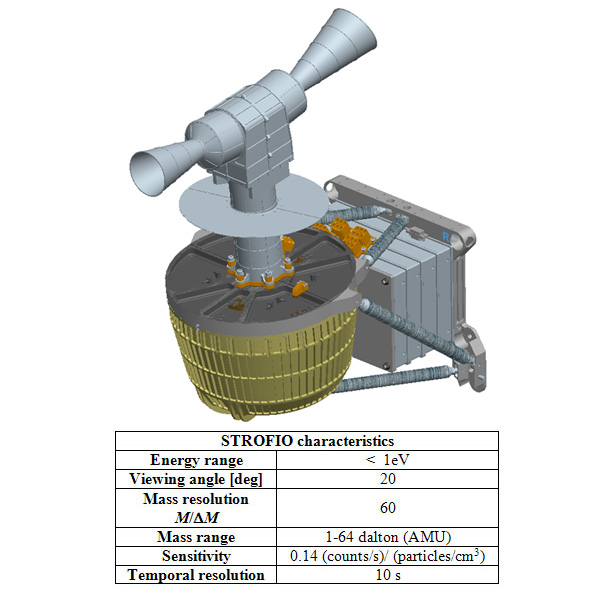
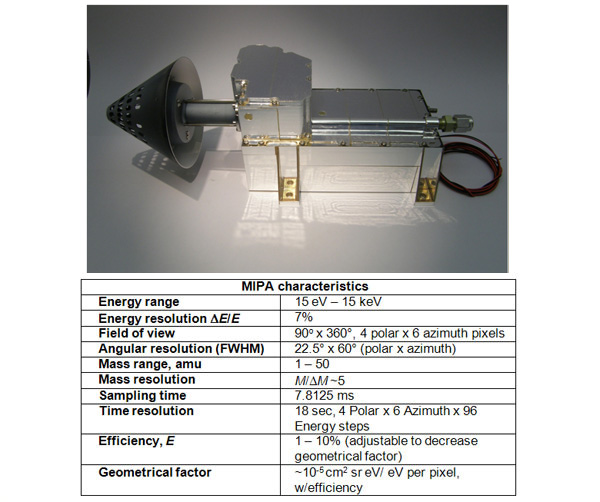



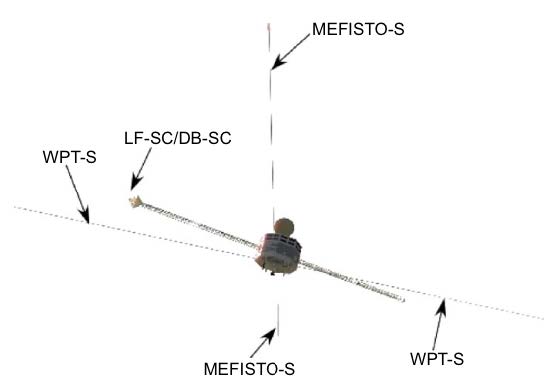
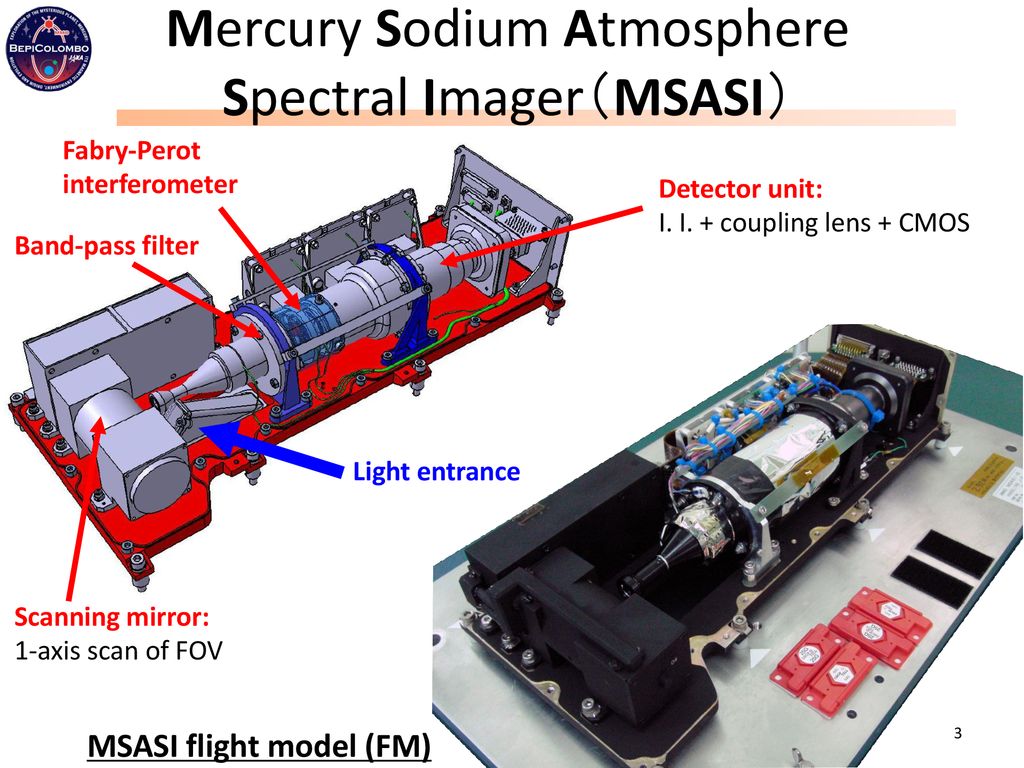
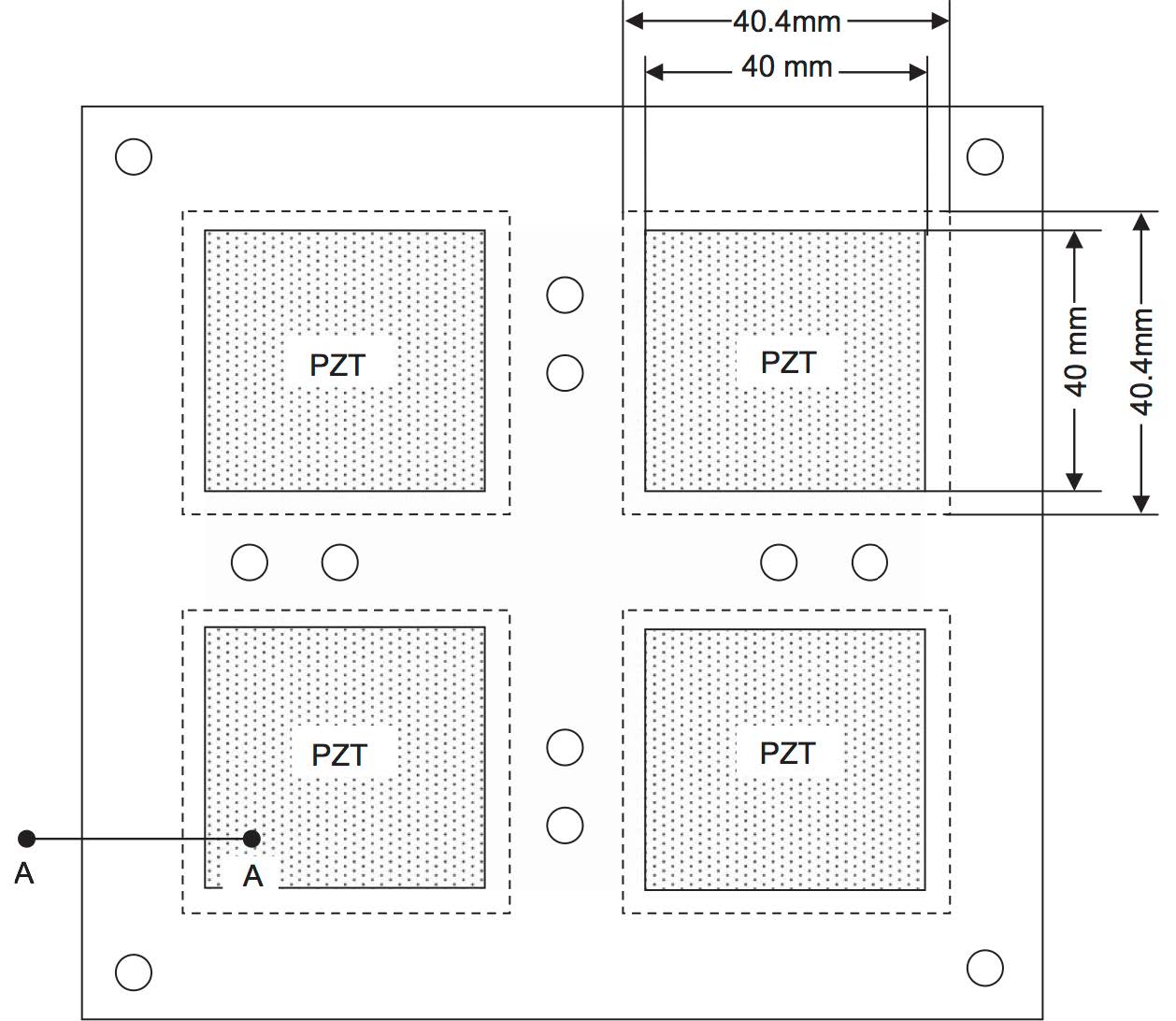
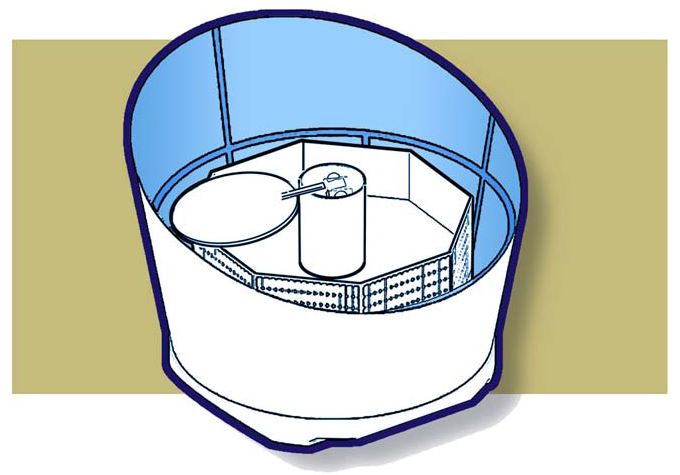
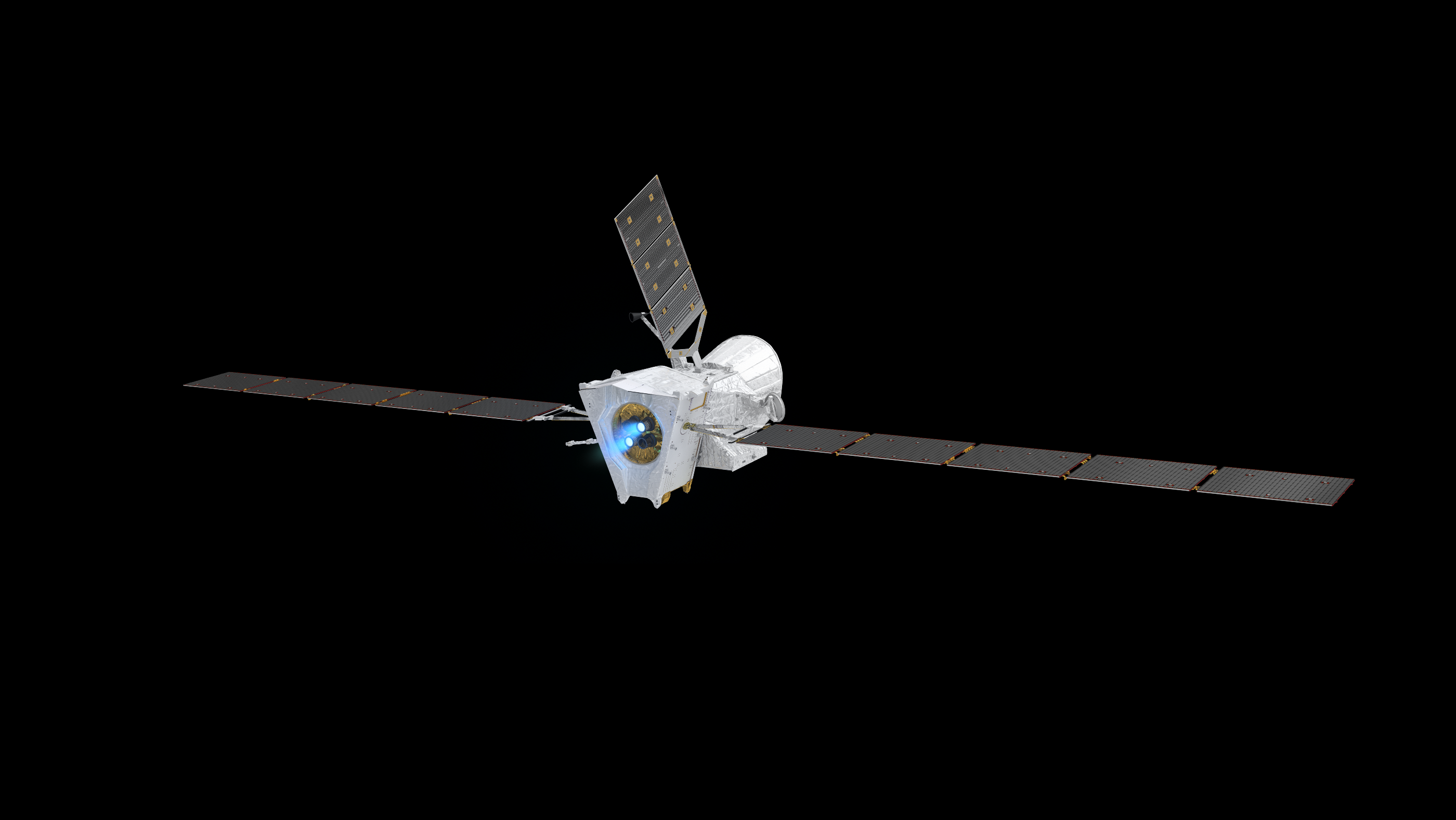

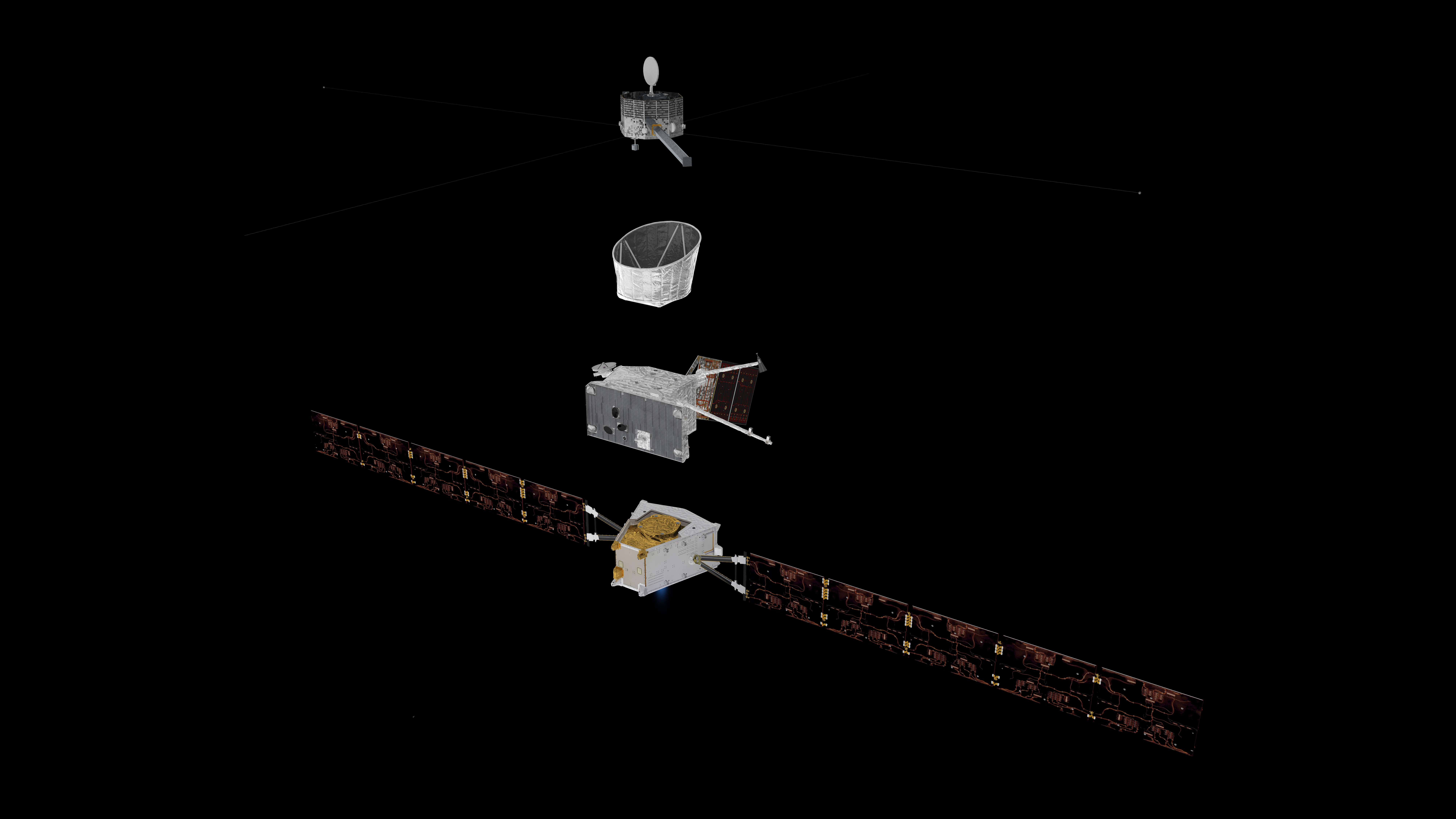


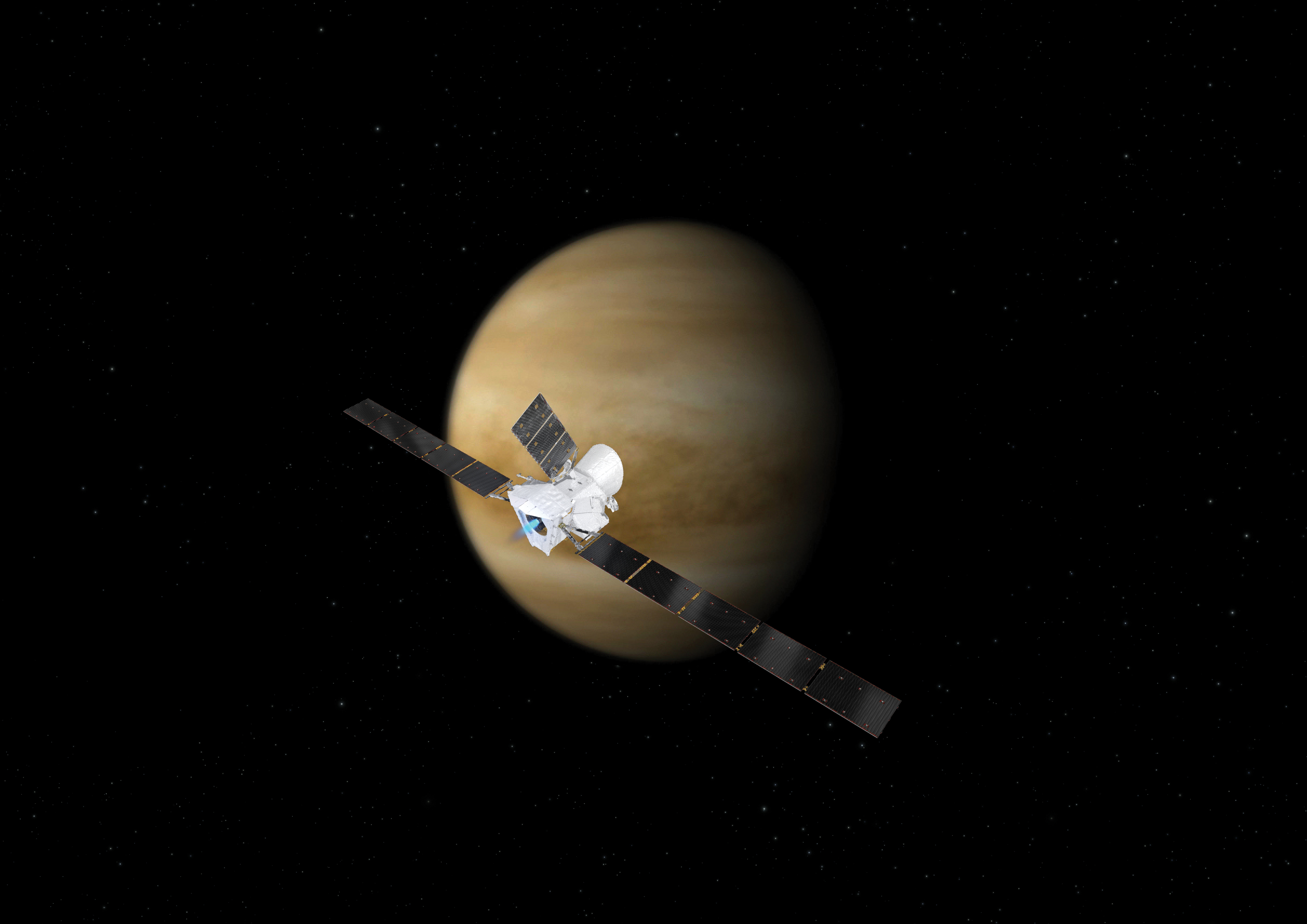



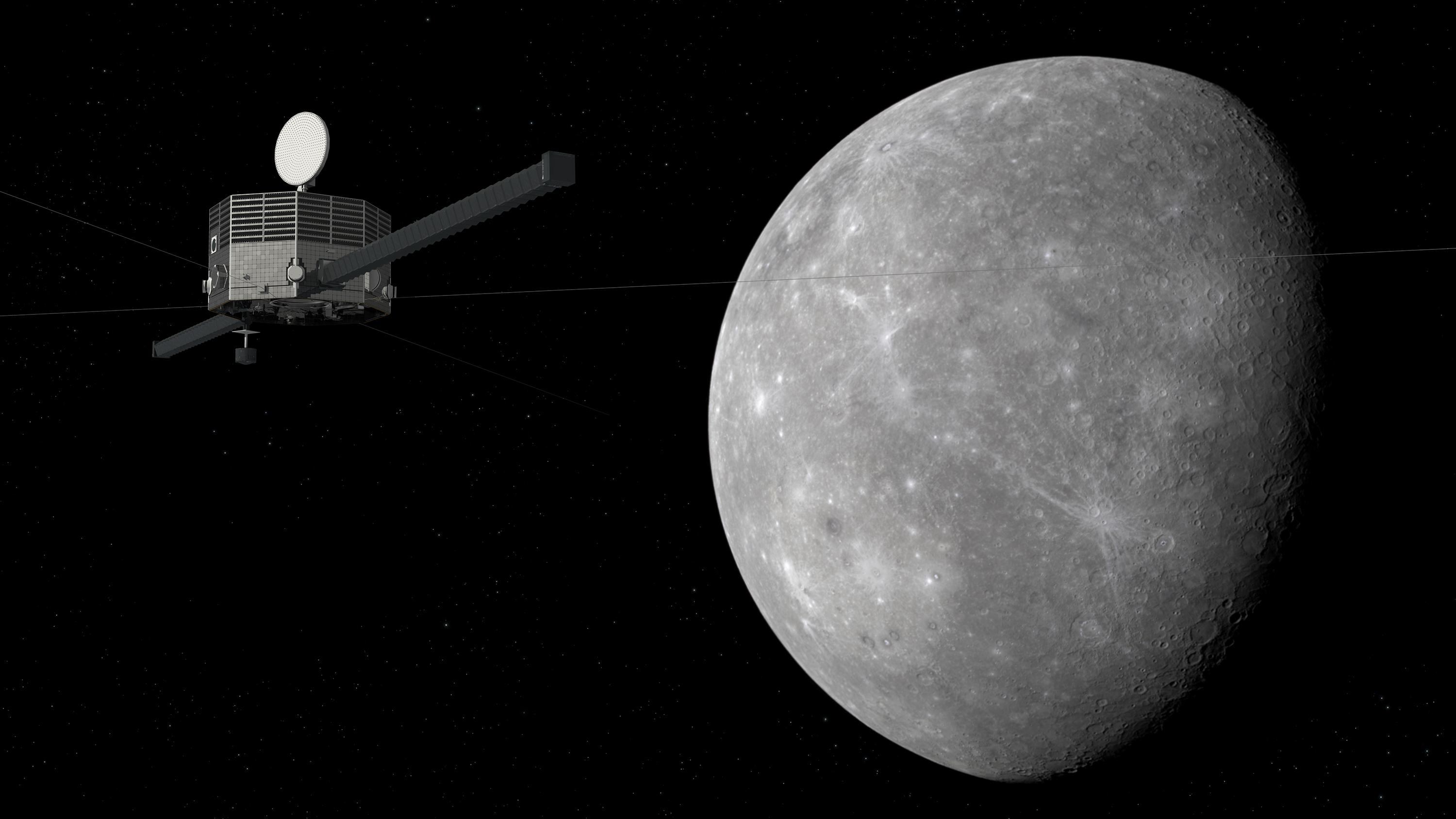

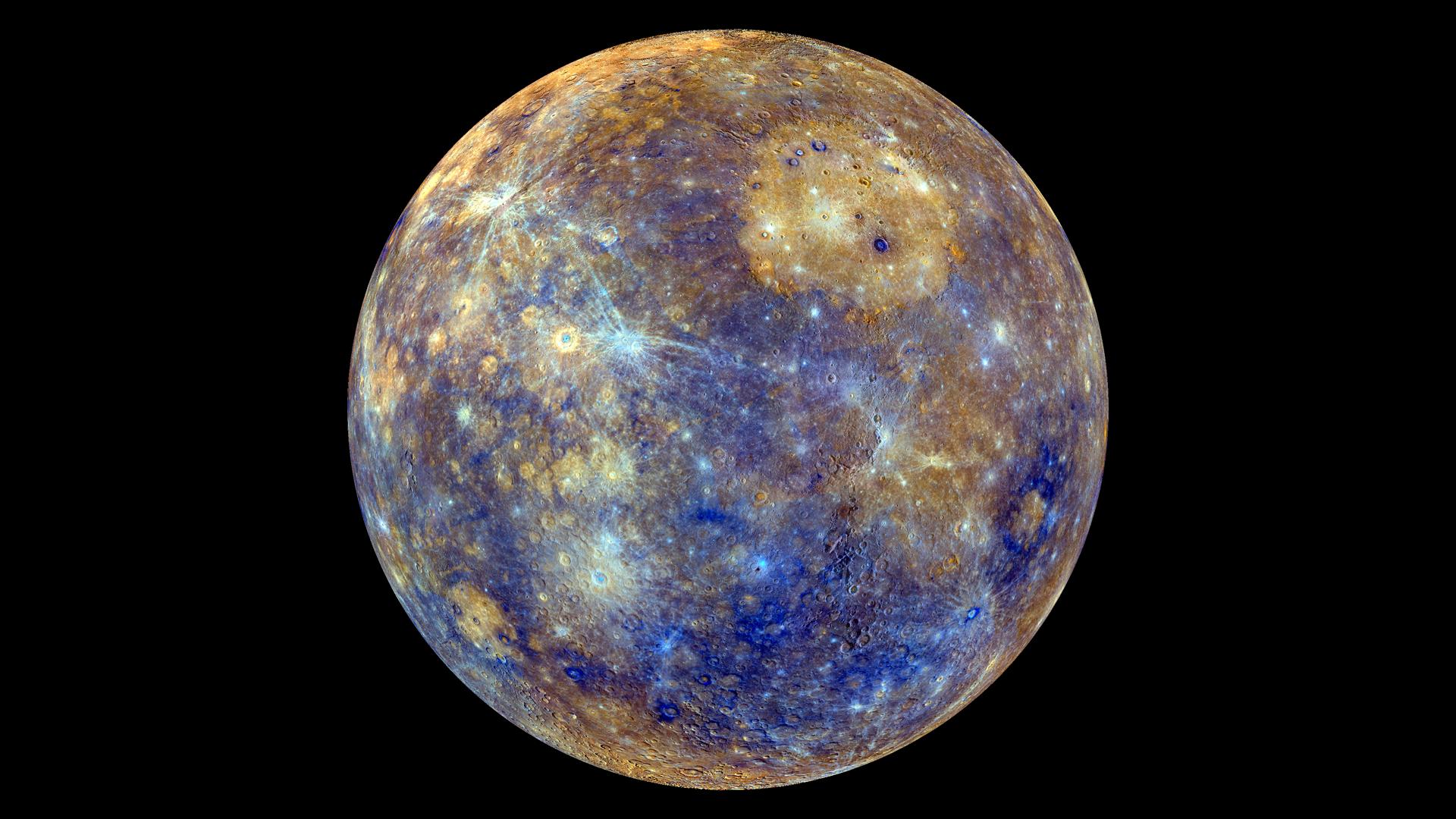
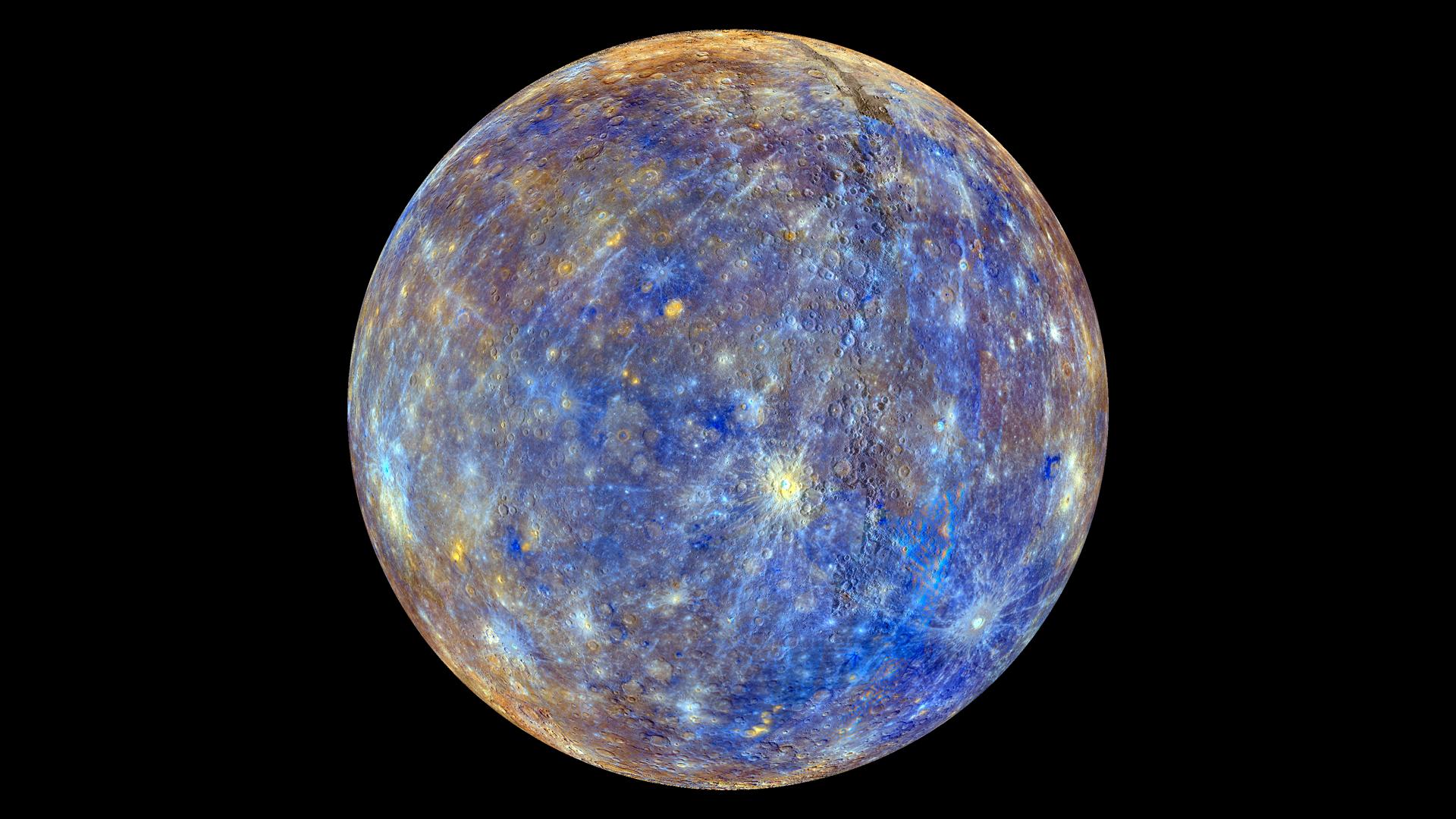
{kind=link}
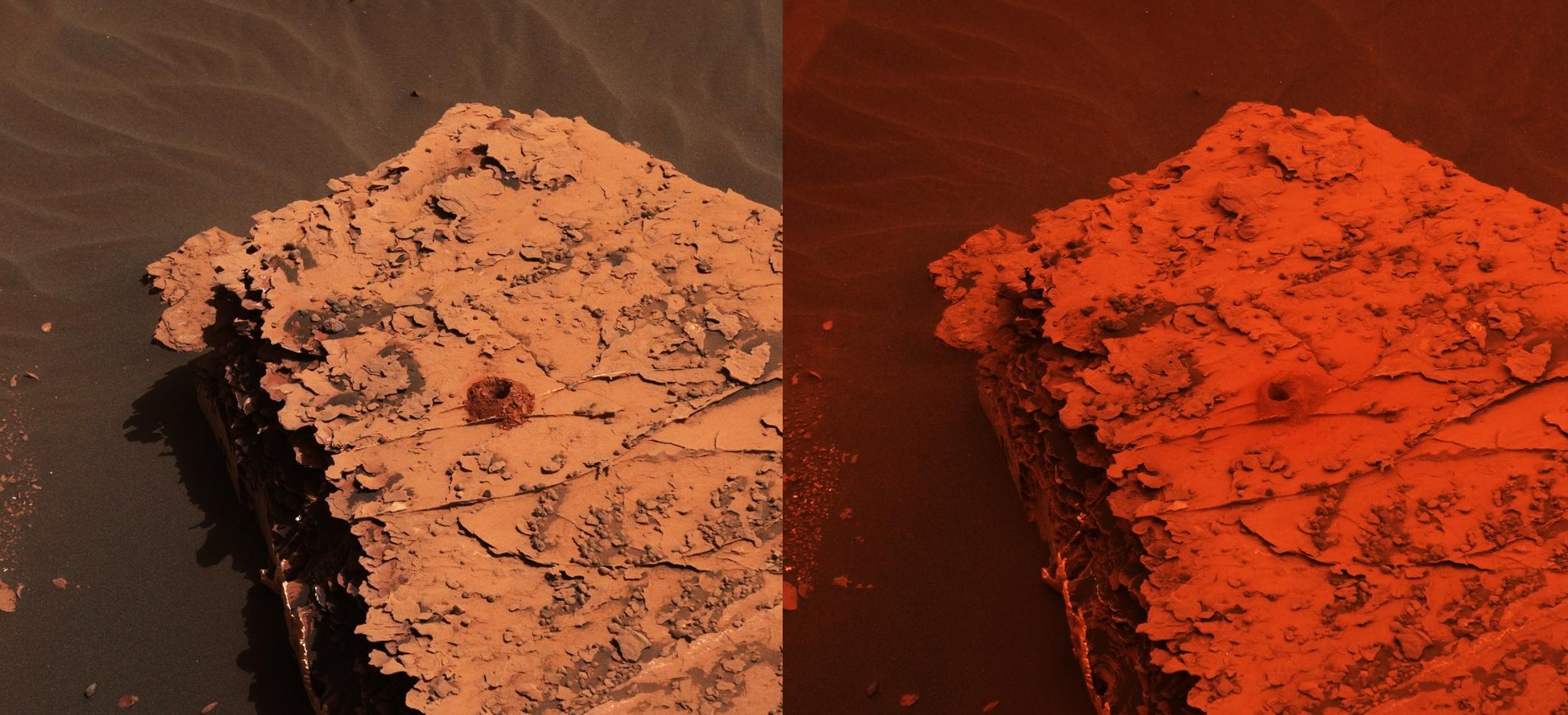{kind=link}
.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
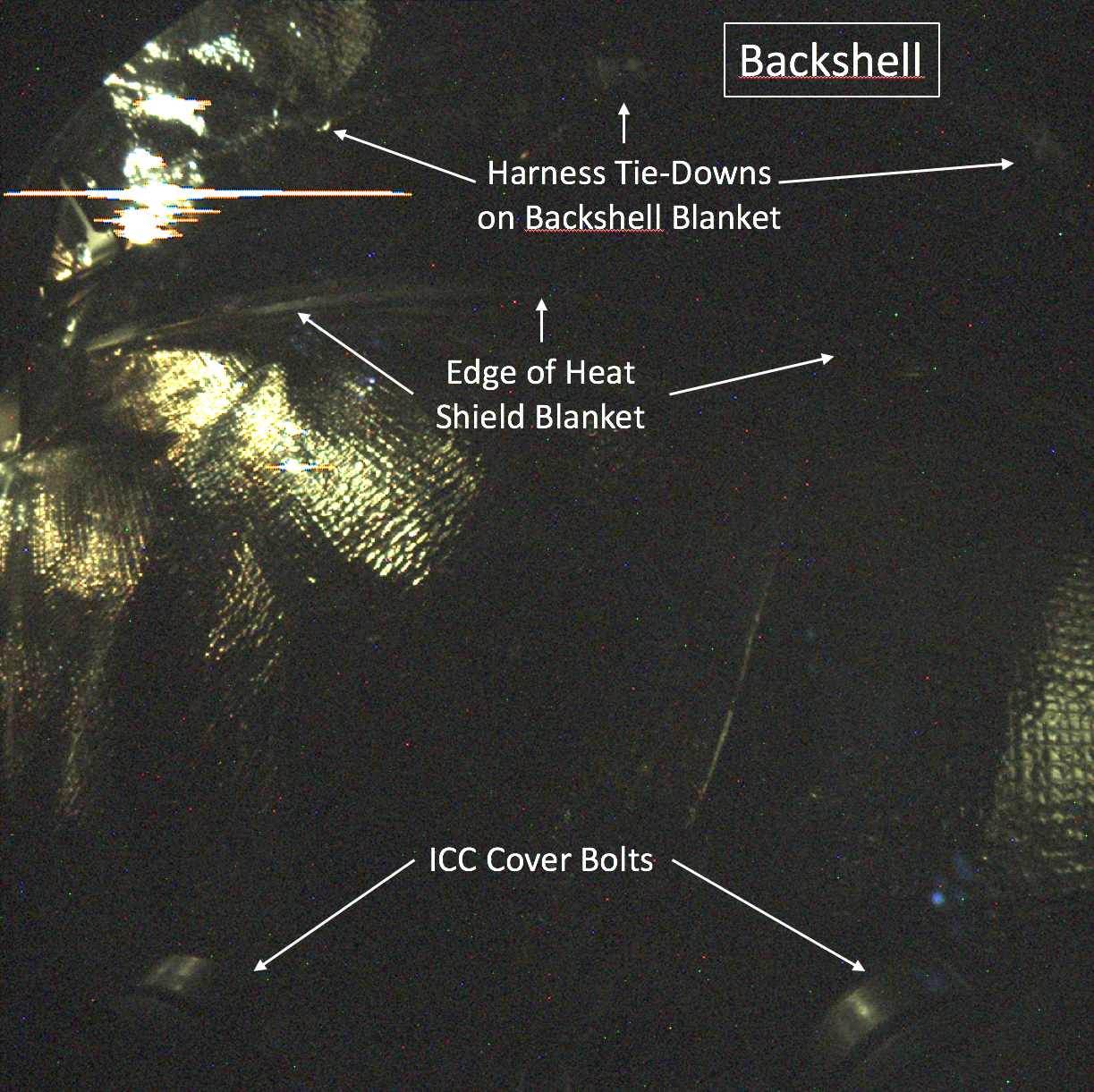{kind=link}
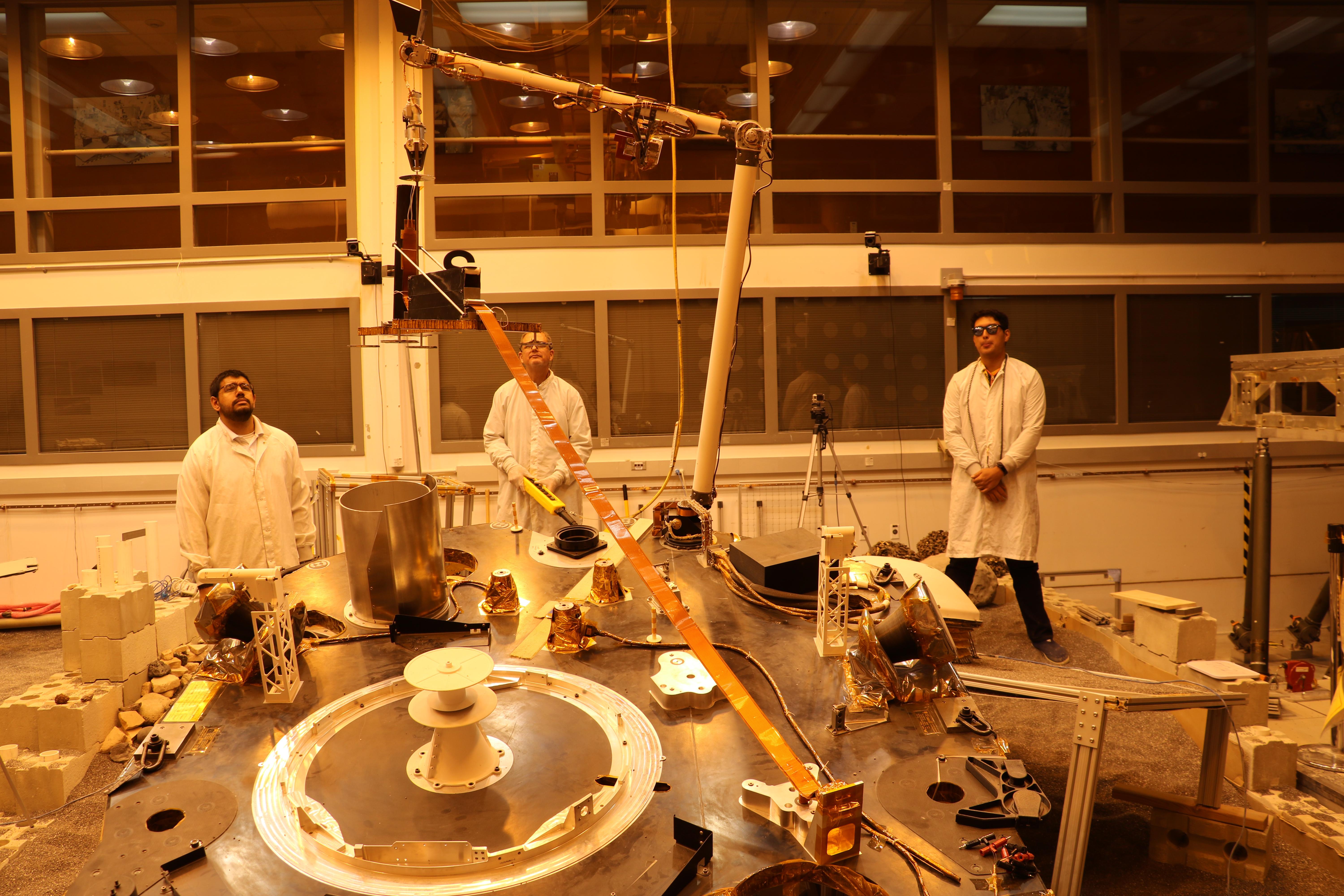{kind=link}
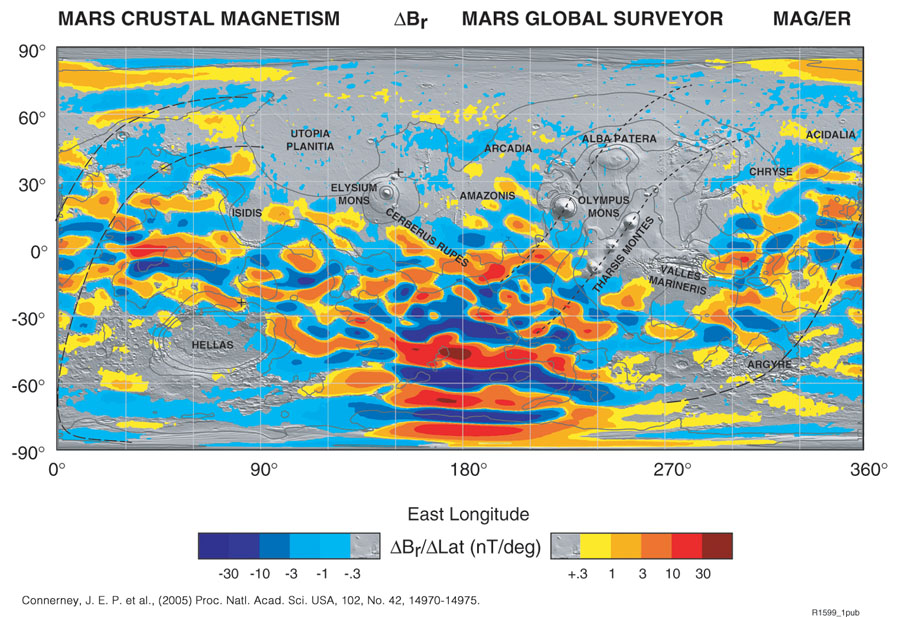{kind=link}
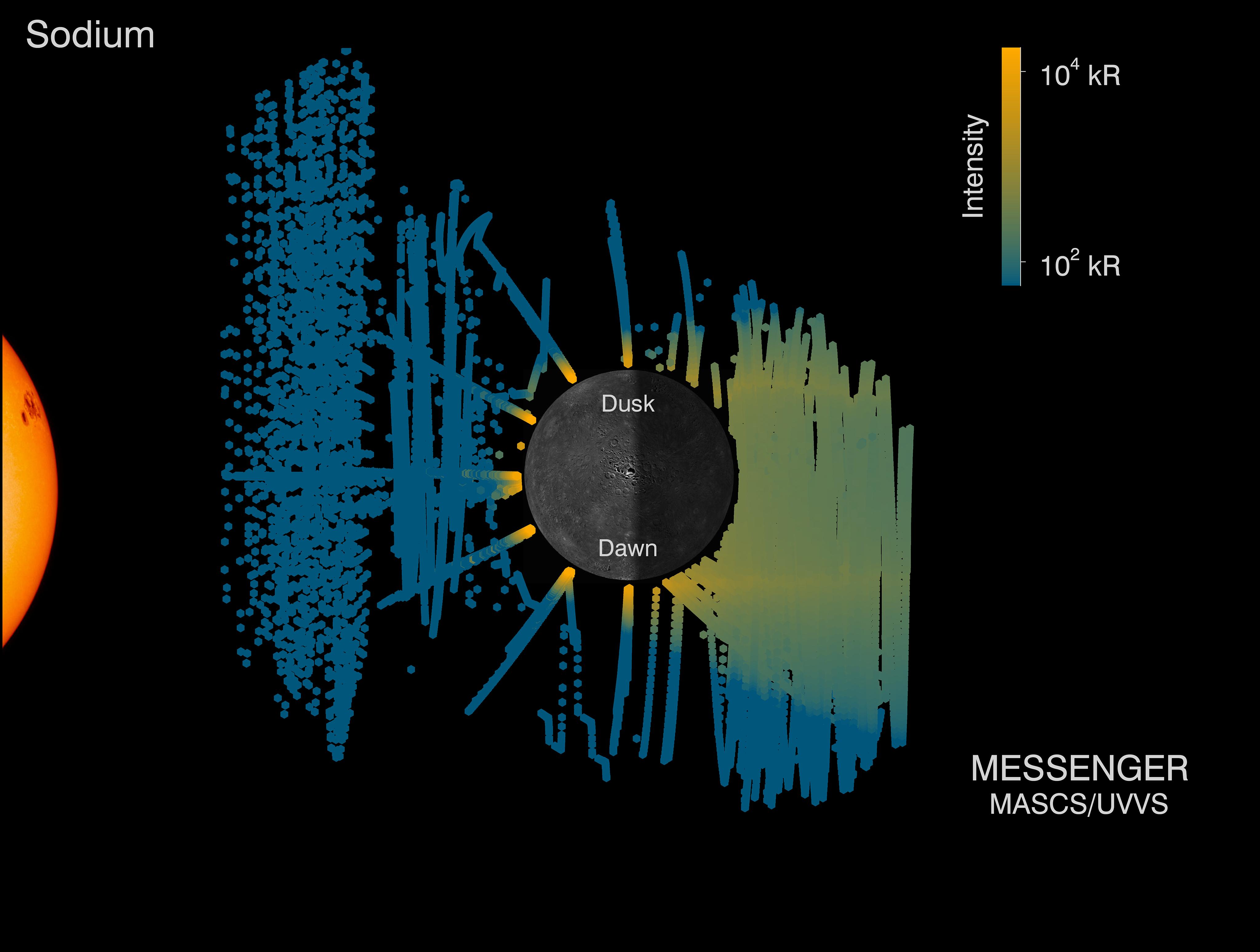{kind=link}