
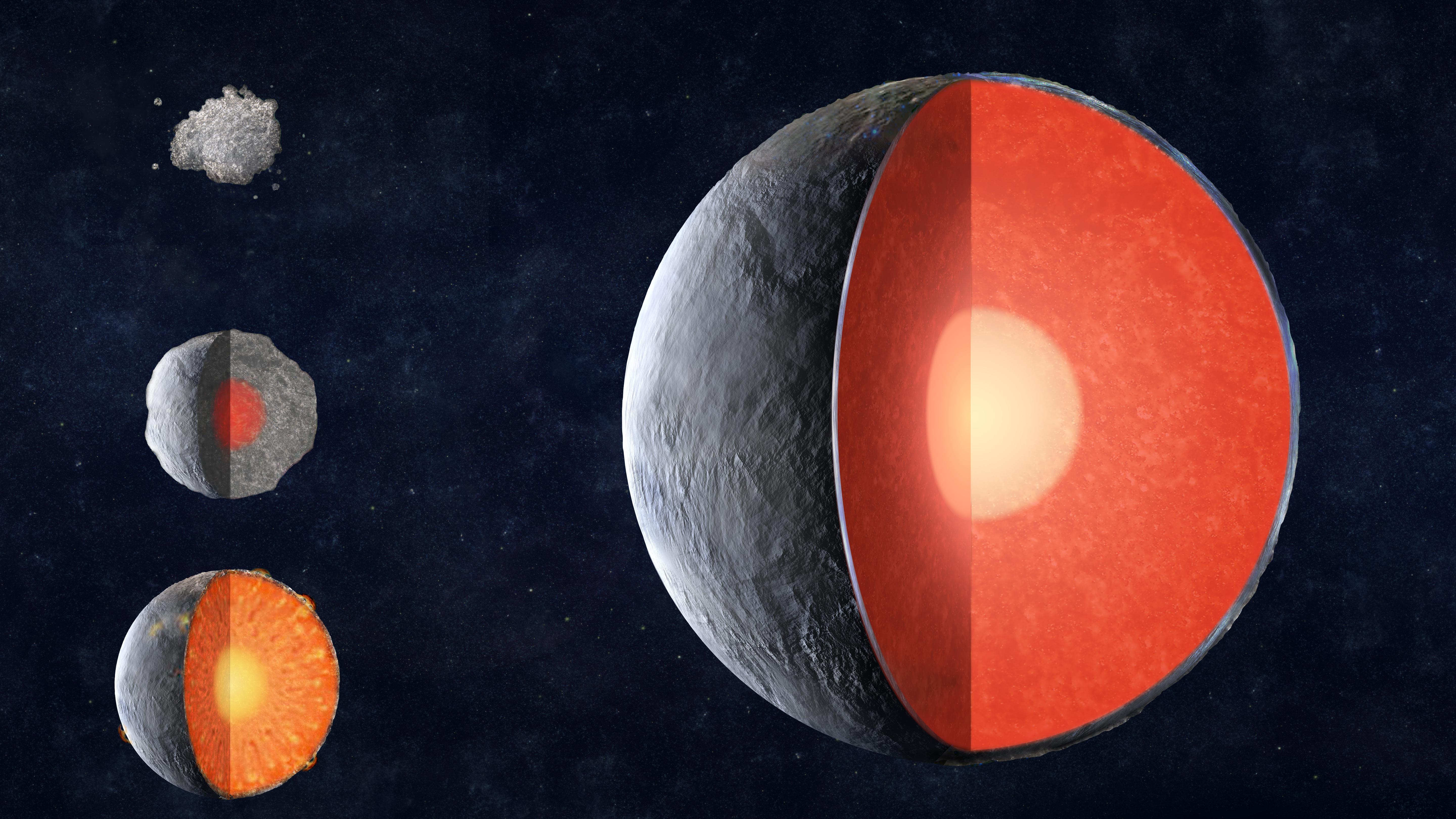
La estructura interna de los cuerpos del sistema solar lleva
obsesionando a los científicos bastante tiempo. Cuerpos rocosos, esferas de
gas…, en nuestra parcela galáctica existe una interesante variedad. Con el
lanzamiento de los satélites terrestres y las sondas espaciales a los distintos
destinos posibles, surgió la posibilidad de caracterizar los primeros detalles
de la estructura interior. De esta manera, además de los experimentos que
cargaban las naves, se podían adquirir datos científicos usando la propia radio
de la nave. El desarrollo de los más potentes transmisores en banda-X
(estrenados por Mariner 10) y grandes
mejoras en el equipamiento de recepción en las antenas terrestres, permitió
medir cambios en la velocidad del vehículo que resultan inconcedibles. Así, a
través de la ínfima variación en la velocidad, se pueden realizar estudios acerca
de la gravedad de un cuerpo y, a partir de ellos, realizar un modelo de la
estructura interna. Sin embargo, la pregunta es: ¿sirve éste método en la
superficie de un planeta o satélite?
A pesar de haber colocado vehículos en las superficies de la Luna,
Venus y Marte, o las misiones eran demasiado breves, o estaban centradas en
otros menesteres, o sus equipos de radio eran poco potentes. Por ello, tuvimos
que esperar a 1997, cuando Mars
Pathfinder alcanzó Ares Vallis. Cargaba un potente transmisor (herencia
directa de Cassini), y llegó a Marte
en una época en la que no existía ninguna  misión. Mars Pathfinder, vista con el tiempo, fue la avanzadilla, y desde
ese tiempo hasta esta parte, hemos ido aumentando exponencialmente nuestros
conocimientos. La suerte de esta pequeña sonda fue que durante los meses de
julio y agosto, y parte de septiembre de 1997, fue la única que funcionó, y por
lo tanto se le dedicaba plena atención. De esta manera, su señal de radio se podía
seguir casi continuamente desde que aparecía en un lado del planeta hasta que
se ocultaba en el otro. A pesar de solo funcionar 83 días (se esperaba que
pudiera llegar al año) el seguimiento de sus comunicaciones permitió calcular
la velocidad de rotación del planeta (facilitado porque estaba casi en el
ecuador) y con ello, se pudo hacer una estimación del tamaño del núcleo
marciano, dando el sorprendente resultado de que el tamaño es similar al
terrestre en proporción. Para obtener conclusiones definitivas, hacían falta al
menos seis meses de emisión directa a las antenas terrestres, pero las
características de las misiones que llegaron posteriormente no hacían fácil que
este experimento se pudiera realizar. Sin embargo, con los MER, surgieron
oportunidades de ciencia inesperadas. La desconcertante longevidad de estos dos
todoterrenos permitió aumentar sus objetivos. Finalmente, tras ocho años de
recorrer la superficie marciana, Opportunity
alcanzó su meta definitiva, el cráter Endeavour. Llegó justo cuando el invierno
empezaba, y llevaron a este aguerrido todoterreno a una ladera inclinada donde
la cual pudiera sobrevivir. Aprovechando la coyuntura, decidieron realizar
parte del experimento, a base de enviar una señal de radio directamente hacia
la Tierra. De los 150 soles que tuvo oportunidad de realizarlo, solo pudo
aprovechar la mitad de los días para ello, proporcionando pocas conclusiones.
De esta manera, si se quiere hacer un estudio serio sobre el tema, es necesaria
una sonda especialmente dotada para ello.
misión. Mars Pathfinder, vista con el tiempo, fue la avanzadilla, y desde
ese tiempo hasta esta parte, hemos ido aumentando exponencialmente nuestros
conocimientos. La suerte de esta pequeña sonda fue que durante los meses de
julio y agosto, y parte de septiembre de 1997, fue la única que funcionó, y por
lo tanto se le dedicaba plena atención. De esta manera, su señal de radio se podía
seguir casi continuamente desde que aparecía en un lado del planeta hasta que
se ocultaba en el otro. A pesar de solo funcionar 83 días (se esperaba que
pudiera llegar al año) el seguimiento de sus comunicaciones permitió calcular
la velocidad de rotación del planeta (facilitado porque estaba casi en el
ecuador) y con ello, se pudo hacer una estimación del tamaño del núcleo
marciano, dando el sorprendente resultado de que el tamaño es similar al
terrestre en proporción. Para obtener conclusiones definitivas, hacían falta al
menos seis meses de emisión directa a las antenas terrestres, pero las
características de las misiones que llegaron posteriormente no hacían fácil que
este experimento se pudiera realizar. Sin embargo, con los MER, surgieron
oportunidades de ciencia inesperadas. La desconcertante longevidad de estos dos
todoterrenos permitió aumentar sus objetivos. Finalmente, tras ocho años de
recorrer la superficie marciana, Opportunity
alcanzó su meta definitiva, el cráter Endeavour. Llegó justo cuando el invierno
empezaba, y llevaron a este aguerrido todoterreno a una ladera inclinada donde
la cual pudiera sobrevivir. Aprovechando la coyuntura, decidieron realizar
parte del experimento, a base de enviar una señal de radio directamente hacia
la Tierra. De los 150 soles que tuvo oportunidad de realizarlo, solo pudo
aprovechar la mitad de los días para ello, proporcionando pocas conclusiones.
De esta manera, si se quiere hacer un estudio serio sobre el tema, es necesaria
una sonda especialmente dotada para ello.

Entre las propuestas presentadas para el programa Discovery, estaba el
proyecto de GEMS, Estación de Monitorización
Geofísica marciana. Utilizando instrumentos más o menos herencia de aquellos
que las misiones Apollo dejaron en la
superficie lunar, se pretendía hacer un estudio completo del interior marciano,
pero que serviría para aplicarlo directamente al resto de cuerpos telúricos del
sistema solar interior, incluyendo la Luna. GEMS
llegó a la final, compitiendo con TiME
(Explorador de los Mares de Titán), una misión para, por primera vez, colocar
un barco que navegara por uno de los lagos del polo norte del satélite gigante
de Saturno y estudiarlo in situ, y Chopper,
una misión cometaria muy curiosa que pretendía estudiar el 46P/Wirtanen (el
perdido objetivo de Rosetta) a base
de entrar en su órbita para, desde allí, posarse en él, elevarse, volverse a
posar, y así sucesivamente a lo largo de la órbita del cometa. Finalmente, el
20 de agosto del 2012, se decidió elegir GEMS,
principalmente por ser una misión de poco riesgo y, sobre todo, la más
económica de las tres.

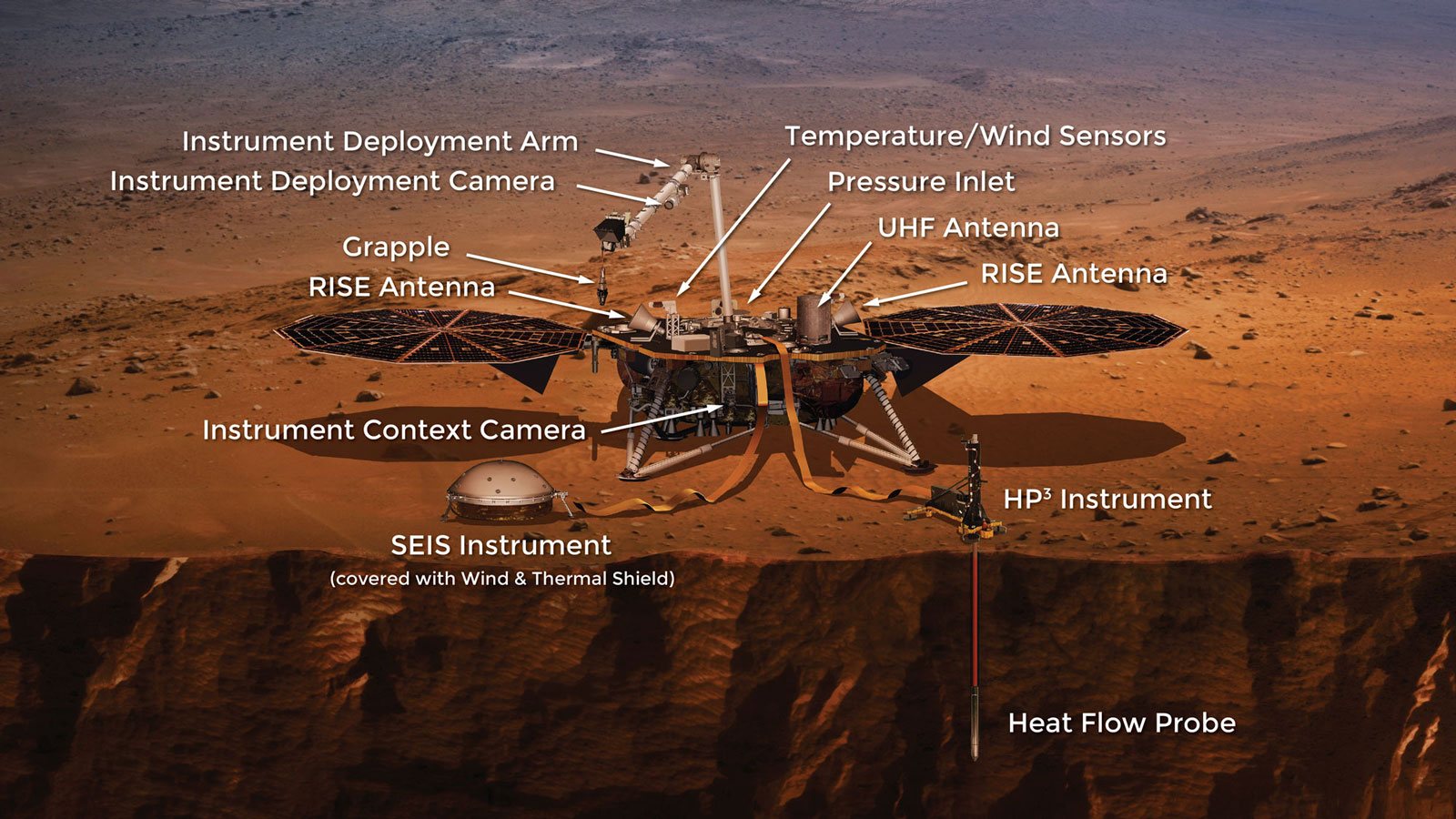
Para hacer realidad InSight,
se ha usado la base del último aterrizador estático que llegó a Marte: Phoenix. De esta manera, la estructura,
paneles solares, brazo robot, sistema de descenso y tren de aterrizaje son
{kind=link}




{kind=link}
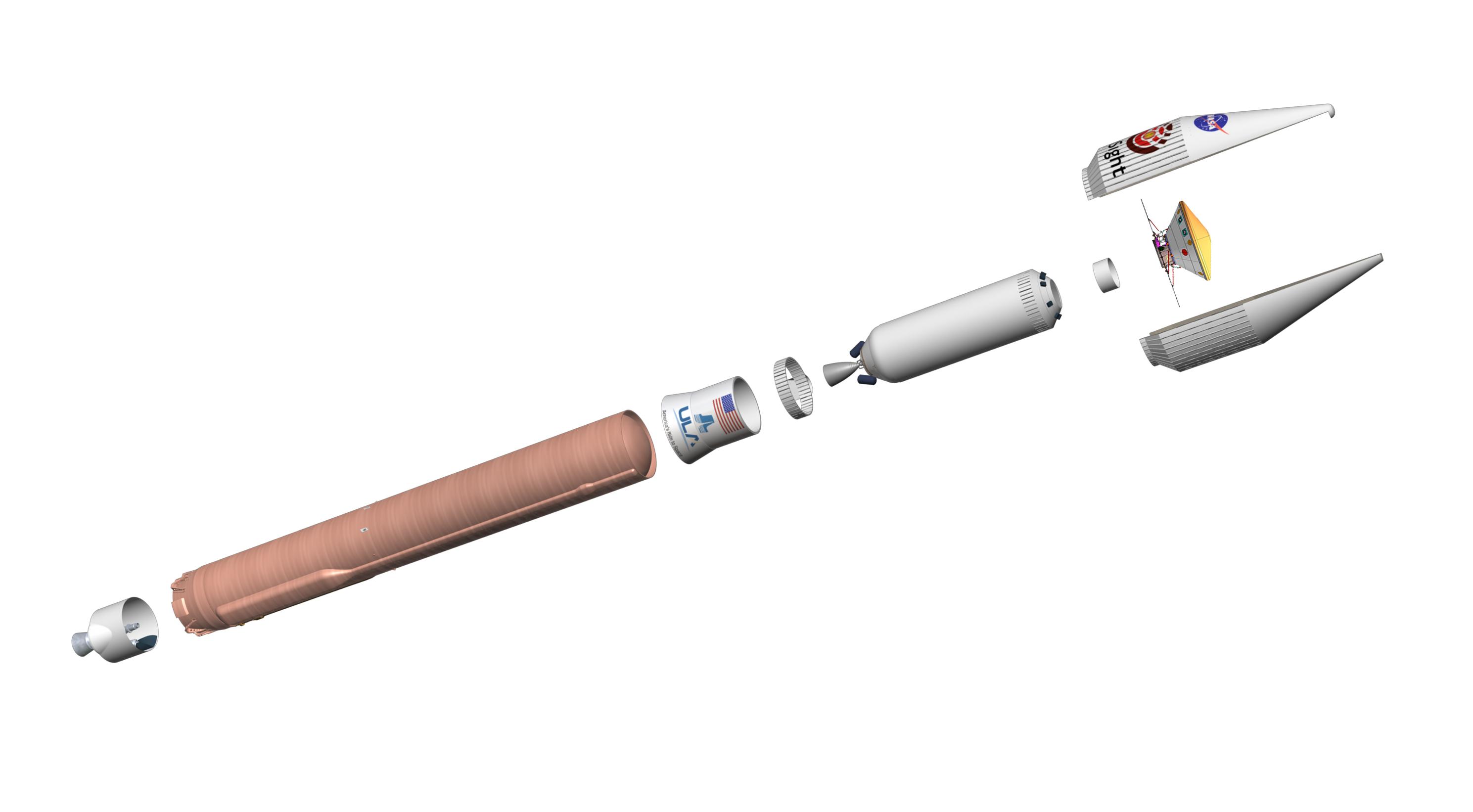
InSight será lanzada el 5 de
mayo mediante un Atlas-401 desde la base californiana de Vandenberg, y tras
 un viaje
de crucero de seis meses, realizando una trayectoria de transferencia tipo 1
(es decir, completa un arco alrededor del Sol de menos de 180º), amartizará en la
zona oeste de Elysium Planitia (coordenadas 4.5º latitud norte, 136º longitud este) el 26 de noviembre, justo al norte del cráter
Gale. Comparado con el proceso de entrada, descenso y aterrizaje de Phoenix en el 2008, hay varios cambios: la velocidad de entrada atmosférica será mayor, la masa del conjunto de aterrizaje también es mayor, InSight amartizará a mayor altitud (por lo que habrá menos atmósfera para frenar), y aterrizará durante el otoño en el hemisferio norte, posible temporada de tormentas de polvo. Por ello, se han efectuado algunos cambios: el escudo de reentrada es más grueso (más material ablativo, para un mayor frenado, y para soportar probables impactos de partículas de polvo), el paracaídas se abrirá a mayor velocidad, por lo que las líneas de suspensión usarán un material más resistente. Como es alimentada por energía solar, y debido a los requerimientos de
medición de RISE, este destino es una obligación. Una vez en la superficie, y
tras comprobar que la sonda funciona correctamente, será el momento de
desplegar los instrumentos.
un viaje
de crucero de seis meses, realizando una trayectoria de transferencia tipo 1
(es decir, completa un arco alrededor del Sol de menos de 180º), amartizará en la
zona oeste de Elysium Planitia (coordenadas 4.5º latitud norte, 136º longitud este) el 26 de noviembre, justo al norte del cráter
Gale. Comparado con el proceso de entrada, descenso y aterrizaje de Phoenix en el 2008, hay varios cambios: la velocidad de entrada atmosférica será mayor, la masa del conjunto de aterrizaje también es mayor, InSight amartizará a mayor altitud (por lo que habrá menos atmósfera para frenar), y aterrizará durante el otoño en el hemisferio norte, posible temporada de tormentas de polvo. Por ello, se han efectuado algunos cambios: el escudo de reentrada es más grueso (más material ablativo, para un mayor frenado, y para soportar probables impactos de partículas de polvo), el paracaídas se abrirá a mayor velocidad, por lo que las líneas de suspensión usarán un material más resistente. Como es alimentada por energía solar, y debido a los requerimientos de
medición de RISE, este destino es una obligación. Una vez en la superficie, y
tras comprobar que la sonda funciona correctamente, será el momento de
desplegar los instrumentos.
Esta es la primera vez que se elige un área de aterrizaje en Marte sin
tener en cuenta la ciencia que la región puede proporcionar. Todos los
requisitos han sido de ingeniería: adecuada energía solar, un lugar escaso de
rocas grandes, sin grandes desniveles, con suficiente atmósfera para decelerar la sonda durante la entrada,
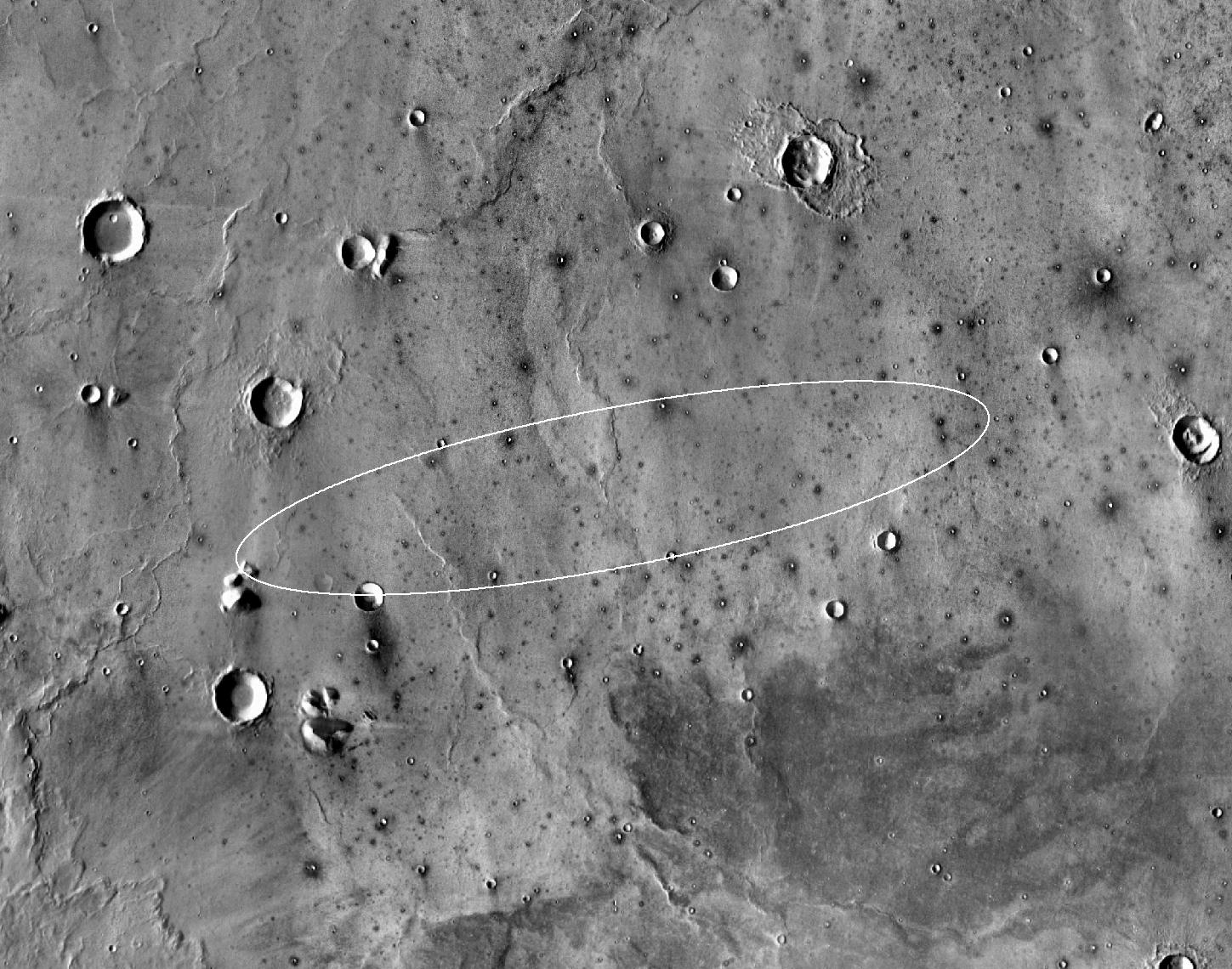
y una inercia termal alta. Aunque existen regiones
marcianas con muchos de estos requisitos, solo diversas áreas de la provincia
de Elysium los reúne todos, y empleando todas las bases de datos existentes (Viking, MGS, Mars Odyssey y MRO) así como imágenes de muy alta
resolución (HiRISE de MRO) se ha
seleccionado la más prometedora de todas. La elipse dada para su amartizaje es
de 139 x 27 km.
La misión de InSight se
espera que dure un año marciano, aproximadamente dos terrestres. Cuando los
experimentos estén en la superficie y funcionando (unas 10 semanas tras el
aterrizaje), tratará de responder cuestiones fundamentales, no acerca de Marte
en exclusiva, sino que es extensiva al resto de cuerpos del sistema solar
interior. De esta manera, intentará comprender la formación y evolución de los
planetas terrestres a través de la investigación de la estructura interna y los
procesos de Marte, y para ello calculará el tamaño, determinará la composición
y el estado físico (si sólido o líquido) del núcleo marciano; el grosor y la
estructura de la corteza; composición y estructura del manto; y estado termal
del interior. Además, y en exclusiva para Marte, establecerá el nivel actual de
actividad tectónica de Marte (magnitud, ratio y distribución geográfica) junto
con el ratio de impacto de meteoritos con la superficie. Su orientación en superficie también será muy importante: al aterrizar en el hemisferio norte, resulta imprescindible que el área de trabajo carezca de sombras, por lo que ésta estará orientada al sur, con los paneles solares (y las antenas de RISE) en dirección este y oeste. De esta forma, las sombras siempre se verán en el lado norte de la zona de aterrizaje, para evitar cambios de temperatura que afecten a SEIS y HP3. Mientras que la colocación de SEIS y su escudo será bastante directa (aún así se tardarán varios soles en completar toda la operación), la de HP3 será más larga, porque tendrá que enterrarse (dependiendo del terreno, podrá estar a entre 3 y 5 metros bajo la superficie), y lo hará por fases, para evitar un exceso de calentamiento en la punta. Una vez todo quede situado donde debe, la misión pasará a ser más tranquila, lejos de la excitación que producen los vehículos autopropulsados.
InSight es la penúltima
misión de la NASA en su programa de misiones a Marte. Con cada vez menos
presupuesto (asignado al telescopio espacial James Webb), la agencia se aleja cada vez más del rincón que más
éxitos le ha proporcionado. Son malos tiempos, no hay duda.
Hay que decir que InSight no
viajará sola al planeta rojo. En noviembre del 2014, la NASA aprobó el
transporte de dos sondas interplanetarias de reducidas dimensiones. Se trata de
unos vehículos de unas dimensiones tan reducidas que se les denomina
picosatélites, o más célebremente, Cubesats. Cada Cubesat es, como la propia
denominación indica, satélites cúbicos, con unas medidas de 10 x 10 x 10 cm., y
pesando apenas 1.3 kg., eso sí, incorporando todo lo necesario para funcionar.
De hecho, esto no es más que el modelo básico, ya que dado su diseño,
enormemente modular y capaz de adaptarse a cualquier requisito, puede estar
formado por más de un Cubesat. Así, dependiendo del número de módulos que
lleve, tiene cada uno una denominación: 1U es el básico, 2U emplea dos, y así
sucesivamente. El caso es que nunca han salido de la órbita terrestre, y a
pesar de que tienen el potencial de realizar exploraciones de espacio profundo
a un coste muy bajo (se han realizado talleres y conferencias al respecto, con
muchos planes de misión), hay que demostrar que valen para el cometido. Los
Cubesats en órbita terrestre se han empleado básicamente para demostración
tecnológica, y son misiones que apenas duran unos días o semanas, estando
protegidos por la magnetosfera terrestre. El problema es que las electrónicas
de los Cubesats son de un tipo más que probado en órbita terrestre, pero que
aún no han visto el entorno interplanetario. Al fin, la NASA se ha decidido a
demostrar el concepto a la primera oportunidad, y aprovechando una
circunstancia. A diferencia del proceso de entrada, descenso y aterrizaje de Curiosity (que era capaz de emitir
señales en banda-X directamente hacia la Tierra mediante una serie de antenas
de baja ganancia) InSight tiene una
masa limitada y es incapaz de transmitir a casa directamente la información del
proceso. Eso sí, lo hace mediante transmisiones UHF que serán recibidas por el
relé Electra de MRO, pero esta
información tardará más de una hora en ser emitida a consecuencia del gran
orbitador marciano. Por ello, aprovechando los Cubesats, se ha ideado una forma
de hacer llegar estas transmisiones empleando otros intermediarios. Estas
pequeñas sondas espaciales que volarán con InSight
se han llamado MarCO (Mars Cubesat
One), y su misión, una vez en las cercanías de Marte, es la de recibirlas para
inmediatamente después transmitirlas a la Tierra. Parece sencillo, pero no lo
es.


Durante el despegue estarán dentro de dispensadores especiales,
acoplados a la sección inferior de la etapa Centaur
del Atlas-V, rodeando su propulsor.
Una vez acabe la tarea propulsiva del Centaur,
y tras separar a InSight, soltará los
dos MarCO, de uno en uno, para así
iniciar su camino hacia el planeta rojo. Una vez en el espacio, desplegarán
todos sus apéndices (paneles solares, antenas), y actuarán como una sonda
espacial convencional, con equipos de control y navegación para cada una,
diseñando y ejecutando las maniobras de corrección de trayectoria (hasta 5)
antes de llegar a las cercanías del planeta rojo. La importancia de la
propulsión es crucial, para poder colocar las dos microsondas en Marte en el momento

preciso y a la distancia indicada. Si todo ha transcurrido como se ha
diseñado, cuando InSight inicie el
proceso de aterrizaje marciano, las dos MarCO
estarán haciendo sobrevuelos lentos sobre el planeta rojo, a una distancia
mínima de 3.500 km. de altitud. Así, cuando InSight
comience a emitir señales UHF, además de MRO,
serán recogidas por los dos MarCO
para su transmisión inmediata, de manera que a medida que las va recibiendo (a
8 Kb. por segundo), pasarán del receptor UHF al transmisor de banda-X para su
transmisión hacia el centro de control (a 8 Kb. por segundo). De esta manera,
su operación es vital para poder recibir, sobre todo, la señal indicadora de
que ha llegado a la superficie. Cuando esto acabe, su misión concluirá, al
menos esa es la teoría.
Esperemos que tengan éxito.
No hay comentarios:
Publicar un comentario