
Estamos a menos de un mes de
un nuevo gran desembarco en Marte, y las tres misiones lanzadas siguen
progresando sin problemas. Ya en julio del año pasado hablamos de dos de ellas:
Al-Amal primero, y Perseverance después. Nos falta la que
fue lanzada entre ambas: el proyecto chino. Hemos esperado a tener más
información, pero no hay manera. Así, a pesar de todo, toca explicar a qué va,
y qué lleva.
Este no es el primer intento
de China en llegar a Marte. Hace casi 10 años lo intentó Yinghuo-1, con un pequeño “polizón” que iba dentro del proyecto
ruso Phobos-Grunt, tan
desgraciadamente perdido. Entre tanto, esta gran nación asiática ha estado
dando grandes saltos en su misión lunar, con un total de seis proyectos
lanzados entre el 2007 y el año pasado, con la culminación de la misión de
recogidas selenita. Esto no quiere decir que se olvidaran del planeta rojo. Tras
perder su primer intento, esta vez decidieron hacerlo en solitario, y entre ese
tiempo y ahora, han formulado un plan, tan ambicioso como el lunar, para
examinar Marte por su cuenta.
La misión casi a punto de llegar es la primera parte del programa. Se la conoce como Tianwen-1, y a diferencia de su antecesora, cuenta con sus propios medios para viajar y llegar a Marte. Podemos entender esta misión como una suerte de combinación de las misiones lunares Chamg’e 1 y Chang’e 3, en que combina la capacidad de estudiar su objetivo desde la órbita, así como desde la superficie, con movilidad. A pesar de que existen grandes bases de datos sobre el planeta rojo, la intención china, antes de ir con objetivos aún más ambiciosos es amasar su propia base de datos acerca del planeta y su entorno. Es a lo que apunta Tianwen-1.
Hasta cierto punto, Tianwen-1 nos recuerda un poco a las
misiones Viking de la década de 1970,
en que 
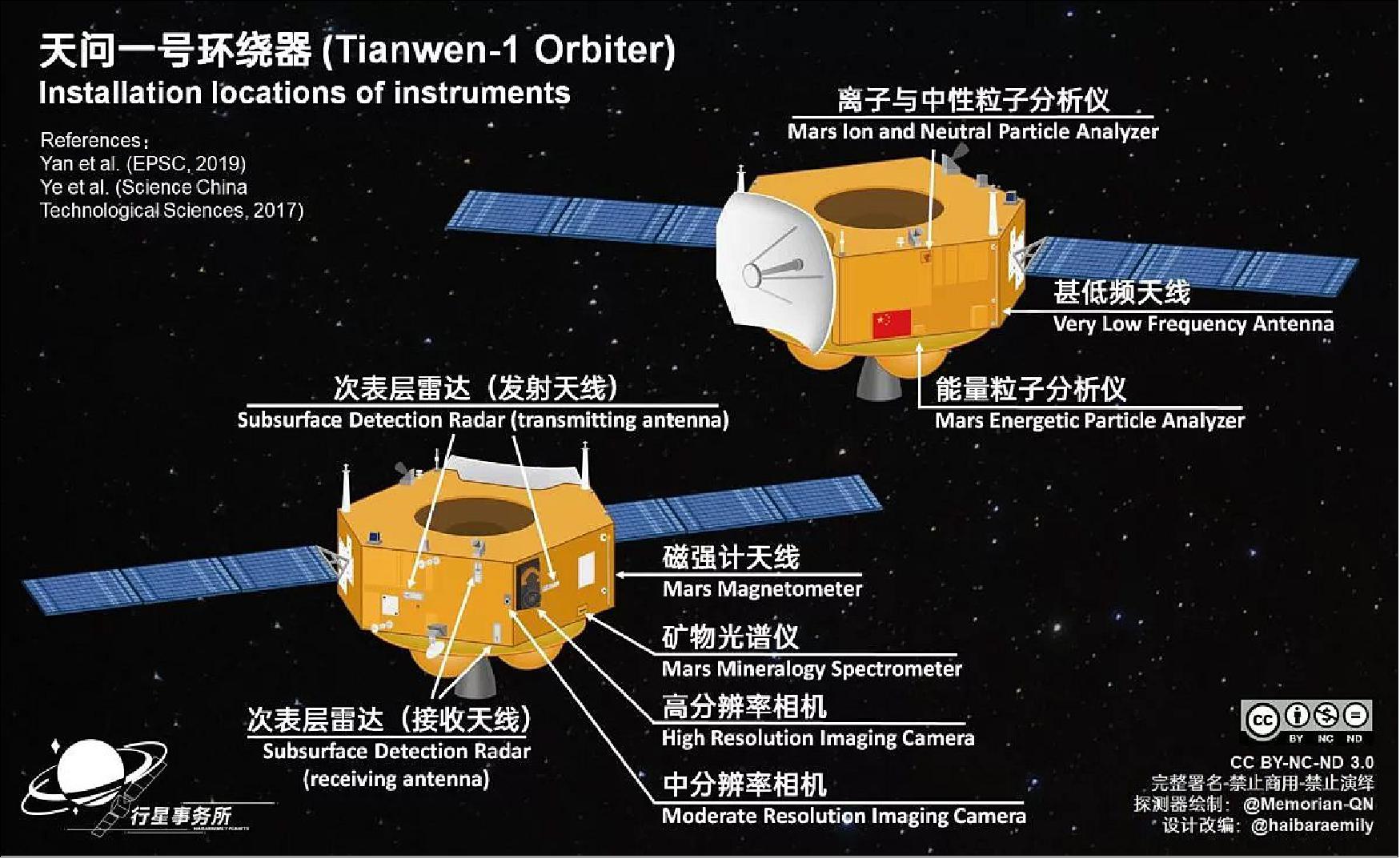
consiste en un orbitador instrumentalizado, que es a la vez módulo portador para un conjunto de descenso. El orbitador es una estructura hexagonal plana, que no solo sirve de fijación para el conjunto de descenso, sino que alberga en su interior lo necesario para funcionar de manera independiente. Lo más visible en el exterior son sus dos paneles solares, de tres secciones cada uno, y una antena de alta ganancia fija a uno de los laterales de la plataforma. En el extremo opuesto al del módulo de entrada está el motor principal, una única unidad de 7500 Newtons de empuje, muy potente para los estándares del espacio profundo. Puesto que contiene instrumentación de escaneo remoto, es un orbitador estabilizado triaxialmente, y puesto que no sólo se trata del orbitador, contará con los medios para contactar con su elemento de superficie de forma bidireccional. Practicará ciencia usando siete investigaciones: una cámara de alta resolución (2 metros desde 400 km. de distancia), cámara de media resolución (100 metros desde 400 km. de distancia), un espectrómetro de minerales, infrarrojo, un radar subsuperficial (el tercero tras el MARSIS de Mars Express y el SHARAD de MRO), un magnetómetro, un analizador de iones y partículas neutrales y un analizador de partículas energéticas. A plena carga, sólo el orbitador desplaza una masa de 3175 kg. El segundo componente de la misión es un rover. Se basa, hasta cierta medida, en sus hermanos lunares, los dos Yutu,
aunque bien vistos, casi son primos hermanos de los MER. Es decir, cuenta con un sistema de movilidad compuesto por seis ruedas, con un esquema de suspensiones muy similar al ya usado por los anteriores rover marcianos. Una plataforma más o menos rectangular Alberga lo esencial para que funcione, y está cerrada por una tapa que hace las veces de panel solar, del que se despliegan otras cuatro secciones. De la parte superior, también le salen dos apéndices: un mástil para las cámaras, y una antena de alta ganancia direccionable. En el caso del rover, aún sin nombre, la ciencia la entregarán seis indagaciones: un juego de cámaras de terreno y de navegación, cámara multiespectral, detector de composición de minerales (en esencia, un sistema láser similar al ChemCam de Curiosity), estación meteorológica, un detector de campos magnéticos, y un radar penetrador del suelo. La masa de este vehículo es de unos 240 kg., unos 70 kg, más que los MER. Puesto que el peso en báscula de todo el conjunto es de unas cinco toneladas, aún queda masa que contar, que es la que ayudará al rover a descender a la superficie: el conjunto de descenso, compuesto por el escudo de reentrada y la aerovaina, un gran paracaídas supersónico, y la plataforma de descenso, formada por la plataforma sobre la que descansa el rover, cuatro patas del tren de aterrizaje, potentes motores de descenso, y las rampas que permitirán que el rover descienda a la superficie. Muchos consideran esta plataforma de aterrizaje un lander, pero hay que verla más como las plataformas usadas por los rover lunares soviéticos Lunokhod de los años 1970.
consiste en un orbitador instrumentalizado, que es a la vez módulo portador para un conjunto de descenso. El orbitador es una estructura hexagonal plana, que no solo sirve de fijación para el conjunto de descenso, sino que alberga en su interior lo necesario para funcionar de manera independiente. Lo más visible en el exterior son sus dos paneles solares, de tres secciones cada uno, y una antena de alta ganancia fija a uno de los laterales de la plataforma. En el extremo opuesto al del módulo de entrada está el motor principal, una única unidad de 7500 Newtons de empuje, muy potente para los estándares del espacio profundo. Puesto que contiene instrumentación de escaneo remoto, es un orbitador estabilizado triaxialmente, y puesto que no sólo se trata del orbitador, contará con los medios para contactar con su elemento de superficie de forma bidireccional. Practicará ciencia usando siete investigaciones: una cámara de alta resolución (2 metros desde 400 km. de distancia), cámara de media resolución (100 metros desde 400 km. de distancia), un espectrómetro de minerales, infrarrojo, un radar subsuperficial (el tercero tras el MARSIS de Mars Express y el SHARAD de MRO), un magnetómetro, un analizador de iones y partículas neutrales y un analizador de partículas energéticas. A plena carga, sólo el orbitador desplaza una masa de 3175 kg. El segundo componente de la misión es un rover. Se basa, hasta cierta medida, en sus hermanos lunares, los dos Yutu,

aunque bien vistos, casi son primos hermanos de los MER. Es decir, cuenta con un sistema de movilidad compuesto por seis ruedas, con un esquema de suspensiones muy similar al ya usado por los anteriores rover marcianos. Una plataforma más o menos rectangular Alberga lo esencial para que funcione, y está cerrada por una tapa que hace las veces de panel solar, del que se despliegan otras cuatro secciones. De la parte superior, también le salen dos apéndices: un mástil para las cámaras, y una antena de alta ganancia direccionable. En el caso del rover, aún sin nombre, la ciencia la entregarán seis indagaciones: un juego de cámaras de terreno y de navegación, cámara multiespectral, detector de composición de minerales (en esencia, un sistema láser similar al ChemCam de Curiosity), estación meteorológica, un detector de campos magnéticos, y un radar penetrador del suelo. La masa de este vehículo es de unos 240 kg., unos 70 kg, más que los MER. Puesto que el peso en báscula de todo el conjunto es de unas cinco toneladas, aún queda masa que contar, que es la que ayudará al rover a descender a la superficie: el conjunto de descenso, compuesto por el escudo de reentrada y la aerovaina, un gran paracaídas supersónico, y la plataforma de descenso, formada por la plataforma sobre la que descansa el rover, cuatro patas del tren de aterrizaje, potentes motores de descenso, y las rampas que permitirán que el rover descienda a la superficie. Muchos consideran esta plataforma de aterrizaje un lander, pero hay que verla más como las plataformas usadas por los rover lunares soviéticos Lunokhod de los años 1970.
.jpg)
Para elevar tanta masa a Marte, China ha recurrido a su lanzador actual más potente, el CZ-5, o Larga Marcha-5, que en términos de potencia, está más cerca del Proton-M que del Ariane 5. De hecho, este es el escogido para lanzar los módulos de la próxima estación espacial china. El despegue se produjo desde el centro espacial de Wenchang, en la isla de Hainan, el pasado 23 de julio. La inyección estuvo a la altura de lo demandado, y desde entonces, la sonda ha cumplimentado tres maniobras de corrección, a la espera de una cuarta.
En el tiempo desde su
lanzamiento hasta ahora ha hecho relativamente poco, más que pruebas,
comprobaciones de la instrumentación (uno fue dejado encendido) y un
experimento, 
cuando, en septiembre, lanzó una cámara al espacio, equipada con dos lentes y conexión Wi-Fi, que obtuvo imágenes del orbitador en el espacio profundo, toda una primicia.

cuando, en septiembre, lanzó una cámara al espacio, equipada con dos lentes y conexión Wi-Fi, que obtuvo imágenes del orbitador en el espacio profundo, toda una primicia.
Su llegada a Marte está fijada
para el 10 de febrero, un día después que Al-Amal,
y usará su motor principal para decelerar y se capturado en una órbita
gigantesca (11 días) alrededor del planeta. Luego, durante las semanas
siguientes, irá usando de nuevo su motor, en los perigeos de su órbita, para ir
reduciendo el apogeo de su trayectoria, al tiempo que comienza operaciones
científicas, buena parte de ellas centradas en obtener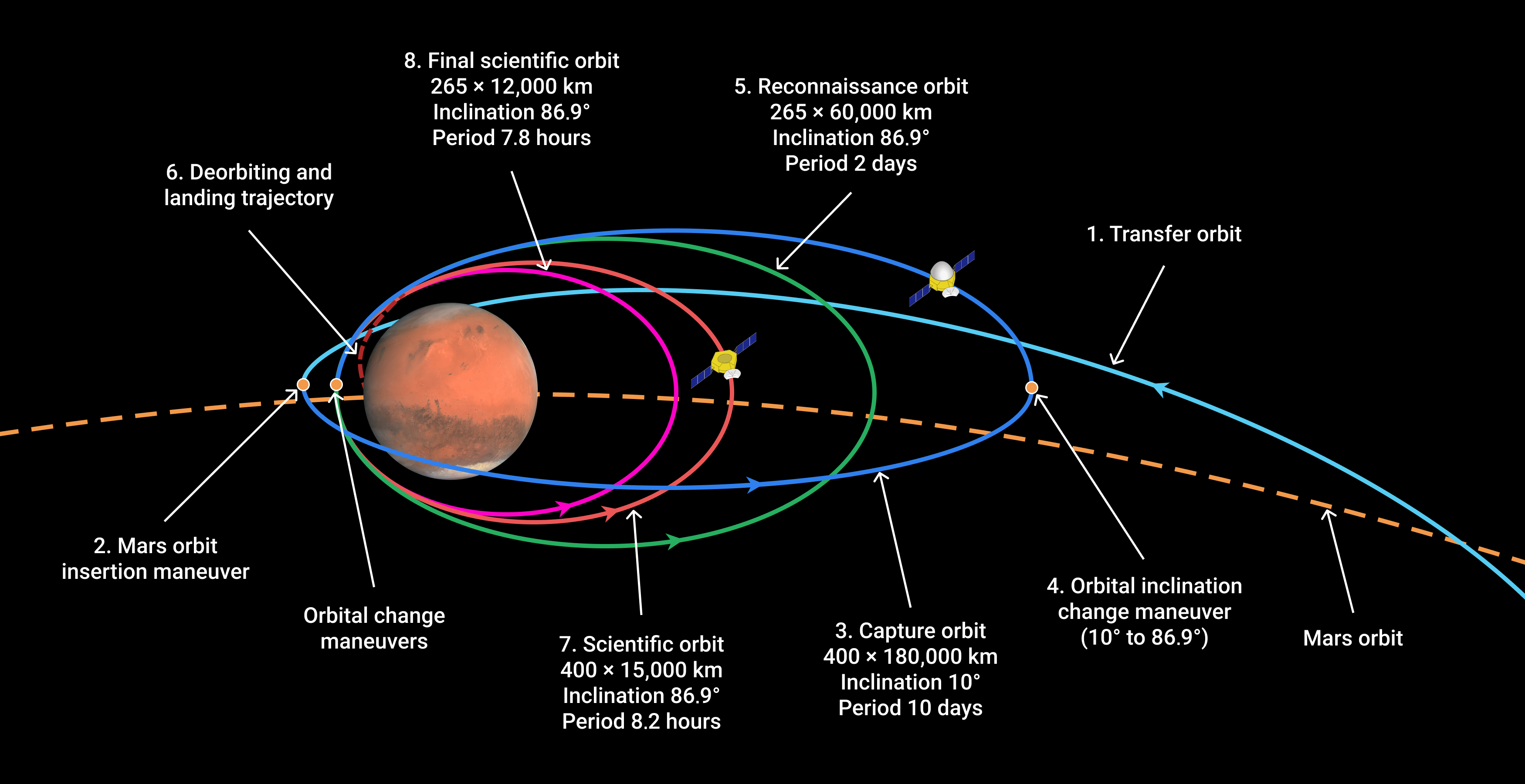
imágenes de alta resolución del lugar designado para el amartizaje del rover. Si el plan va según se ha previsto, el elemento de superficie descenderá a Utopia Planitia, al sur de donde amartizó Viking 2, hacia el mes de mayo. Esta región es parte de la mayor extensión de terreno plano del sistema solar, más que los fondos oceánicos terrestres, estando ya al norte de la línea divisoria entre los dos hemisferios, los terrenos altos del sur, y los terrenos bajos del norte. La principal razón de aterrizar allí está en la ingeniería: Utopia Planitia es una zona baja de Marte, y eso significa tener más atmósfera para frenar. Sin embargo, la ciencia ha determinado que es uno de los lugares más interesantes que se pueden estudiar en Marte.
imágenes de alta resolución del lugar designado para el amartizaje del rover. Si el plan va según se ha previsto, el elemento de superficie descenderá a Utopia Planitia, al sur de donde amartizó Viking 2, hacia el mes de mayo. Esta región es parte de la mayor extensión de terreno plano del sistema solar, más que los fondos oceánicos terrestres, estando ya al norte de la línea divisoria entre los dos hemisferios, los terrenos altos del sur, y los terrenos bajos del norte. La principal razón de aterrizar allí está en la ingeniería: Utopia Planitia es una zona baja de Marte, y eso significa tener más atmósfera para frenar. Sin embargo, la ciencia ha determinado que es uno de los lugares más interesantes que se pueden estudiar en Marte.

Como casi todo programa marciano, lo que se busca al final es una cosa: vida. Sin embargo, Tianwen-1 no está preparada para ello, sino más bien que está enfocada hacia la obtención de pistas que apoye la tesis, cada vez más clara, de un pasado acuático de Marte. Para ello, la tradicional: mapas, geográficos, mineralógicos, topográficos, además de buscar hielo bajo la superficie, y estudiar el entorno espacial alrededor del planeta. Mientras, en la superficie buscará, a escala microscópica, esas señales minerales, geológicas y geográficas que lleven a eso. Al tiempo que se prueban los medios para una futura misión de recogida de muestras. Una cosa que el rover no será capaz de hacer es ciencia de contacto, carece de brazo robot instrumentalizado que pueda situar sobre las rocas o el suelo.
¿Qué aporta Tianwen-1 a la exploración marciana? A primera
vista, nada, pero contar con sistemas como una cámara de alta resolución es un
recurso muy valioso en un planeta como Marte, ya que solo el sistema HiRISE de MRO le gana en resolución. El verdadero
beneficio potencial lo entregará el rover, porque permitirá estudiar 
una amplia región sólo vislumbrada de cerca con Viking Lander 2 a lo largo de 1290 soles. La única pega es que la información de esta misión, como suele ocurrir con sus homólogas lunares, será escasa. Esperamos equivocarnos. Toda la suerte del mundo.
una amplia región sólo vislumbrada de cerca con Viking Lander 2 a lo largo de 1290 soles. La única pega es que la información de esta misión, como suele ocurrir con sus homólogas lunares, será escasa. Esperamos equivocarnos. Toda la suerte del mundo.
No hay comentarios:
Publicar un comentario