El programa marciano abierto con Mars Global Surveyor estaba perfectamente estructurado para que, cada dos años en cada ventana de lanzamiento, enviar sondas que investigaran nuevos aspectos del planeta. Para el 2003, una vez definidos los objetivos del 2001, estaba previsto enviar un aterrizador con un rover para comenzar la recogida de muestras, para luego colocarlas en órbita marciana, y luego, en el 2005, mediante un proyecto NASA-CNES (de Francia) se enviaría un orbitador junto con un conjunto Lander-Rover para continuar la tarea, colocar esas nuevas muestras en órbita marciana para que el orbitador las recogiera y las trajera a la Tierra. Huelga decir que tras la pérdida de Mars Climate Orbiter y Mars Polar Lander (el peor desastre de la historia de la NASA en Marte), el plan estalló, literalmente. Tras su replanteamiento, se fijó que en el 2001 se pondría en camino Mars Odyssey, pero se necesitaba un proyecto de rápido desarrollo para la del 2003. Se propusieron múltiples propuestas y, tras una rápida selección, quedaron dos finalistas.
La primera propuesta era una potente sonda orbital que, una vez en Marte, realizaría tareas tan similares a las de Mars Global Surveyor que, en primer término, la complementaría, para después sustituirla, para así seguir monitorizando el planeta rojo pero con instrumentos de última tecnología. La segunda, planteaba el envío de dos vehículos gemelos para la exploración, desde la misma superficie, de la historia geológica del planeta, basados en el Sojourner, pero más grandes y capaces. Fue elegido éste último, gracias a que usaría tecnologías desarrolladas y probadas.
Llamados
MER, o Rovers de Exploración de Marte, se basaban en gran medida en
Mars Pathfinder y su pequeño todoterreno. En esencia, el plan consistía en trasladar toda la electrónica, sistemas de transmisión y generación de energía a un Sojourner agrandado. Fueron planteados para ser geólogos de campo tremendamente capaces. Sus instrumentos científicos provenían en su mayoría de la cancelada
Mars Surveyor 2001 Lander, ya que se vio que, situados en un vehículo móvil, serían más capaces. A decir verdad, la NASA encargó a la empresa Athena el diseño de un todoterreno de mayores dimensiones y capacidades superiores para enviarlo junto con el aterrizador del 2001. El retraso en el desarrollo provocó que fuera seleccionada una versión mejorada del
Sojourner como acompañamiento. Ninguno alcanzó Marte, y el desarrollo de estos Rovers fue aprovechado para la misión recientemente aprobada.

Del tamaño de un carro de golf, con unas medidas de 1.5 metros de alto, 2.3 de ancho y 1.6 de largo, cada MER circulaba sobre seis ruedas apoyadas en suspensiones derivadas de los Boogies. Cada rueda, de 26 centímetros de diámetro, iba acoplada a un motor independiente con su caja de cambios. Las ruedas de las esquinas eran directrices, aunque eran todas motrices. También poseía la capacidad de hacer girar independientemente una de las ruedas para abrir pequeñas zanjas en el terreno para su posterior examen. La velocidad máxima era de 5 centímetros por segundo, siendo capaz de recorrer hasta 120 metros al día en superficies favorables. Las suspensiones iban fijadas a la caja de electrónica y unidas mediante un diferencial. Mecánicamente era capaz de subir pendientes verticales de 45º, aunque las medidas de seguridad electrónicas colocadas (vía unidad de medición inercial) evitaban que superara desniveles superiores a 30º de inclinación. En su interior iba el ordenador (el procesador era un RAD6000, del mismo tipo que el montado en
Mars Odyssey, con una memoria RAM de 128 MB, aumentada con una memoria flash de 256 MB), los sistemas de transmisión, las dos baterías de ión litio y los calentadores eléctricos y de radioisótopos. Una capa interna de aerogel proporcionaba aislamiento del clima exterior. Colocado bajo un saliente de la caja de electrónica, un brazo robot de dos secciones y 0.8 metros de largo llamado IDD (aparato de despliegue de instrumentos), finalizado en un montaje con las herramientas de contacto. Tapando la parte superior de la caja, estaban los paneles solares, con una superficie activa total de 1.3 metros cuadrados, que proporcionaban un máximo rendimiento de 1000 Vatios/hora, necesitando 100 para sus
movimientos. De ellos también salían las antenas y el mástil de las cámaras. Para comunicación con Tierra fueron montadas 3 antenas. Dos de ellas, derivadas directamente de
Mars Pathfinder, servían para transmisión directa con Tierra, siendo la de alta ganancia un disco colocado sobre una base direccional, y la de baja ganancia, una fija omnidireccional, usando un compacto sistema de comunicaciones en banda-X. La tercera era la UHF, compatible con las de la MGS y
Mars Odyssey. En total, cada MER llevaba 5 instrumentos científicos y tres herramientas de ingeniería. En lo alto de un mástil, y sobre una plataforma rotatoria 360º y con una capacidad de inclinación de 90º, estaban las
PanCam, Cámaras Panorámicas. Situadas cada una en cada extremo y separadas 30 centímetros una de otra, eran cámaras idénticas monocromáticas acopladas a su rejilla CCD. Cada una tenía su propio sistema de filtros, que consistía en una rueda de 14 posiciones, usado para componer imágenes en falso color y color casi real. Eran cámaras de ángulo cercano con una resolución más de 3 veces superior al sistema IMP de
Mars Pathfinder. Montado dentro de la carcasa sobre la que operan los mecanismos de elevación, se hallaba el
Mini-TES, Mini-Espectrómetro de Emisión Termal. Realmente el instrumento estaba montado en la caja de electrónica, y en el mástil se encontraba una ventana con un espejo en su interior que llevaba la luz al aparato. Esa ventana estaba colocada en un montaje, llamado ensamblaje del espejo de escaneo, que era capaz de un movimiento de 30º en elevación y de 50º en depresión, mediante un motor exclusivo. Era una versión portátil del instrumento montado en la
Mars Global Surveyor, y operaba idénticamente. Desde su privilegiada posición estudiaría la emisión infrarroja (167 tipos distintos de brillo de infrarrojo) emitida por la superficie para determinar los minerales que la componen, así como investigar las rocas a las que luego dirigiría el resto

de instrumentos. Colocadas en el montaje de contacto al final del IDD, los otros tres. El APXS, Espectrómetro de Partículas Alfa y Rayos X, era una versión mejorada del equipado por el
Sojourner, y se encargaba de estudiar las rocas para determinar con precisión la composición de las rocas, a base de aplicar una especie de estetoscopio, cargado con pequeñas piezas de curio-244, durante cierto tiempo, y así poder estudiar los procesos que las formaron, para un estudio de la historia de la evolución geológica del planeta. El Espectrómetro Mössbauer, era una caja que llevaba dentro dos pequeños fragmentos de cobalto-57, material radiactivo que servía al sensor colocado al final de esa caja para detectar en las rocas los tipos de minerales que contienen hierro, difíciles de detectar con otros medios. También permitía detectar minerales magnetizados, así como materiales formados en ambientes cálidos y húmedos. La vida media del cobalto-57 era de unos 271 días. Y por último la MI, Cámara Microscópica. Formada por un microscopio acoplada a una cámara CCD monocromática, estaba especializada en el examen en alta resolución de las rocas para generar imágenes de contexto para los datos tomados por el APXS o el espectrómetro Mössbauer. Con una resolución de cientos de micrones, podría distinguir si las rocas son sedimentarias, si poseen venas minerales, o agujeros provocados por la expulsión de gases en las rocas volcánicas. Salvo el APXS, el resto los hubiera montado la
Mars Surveyor 2001 Lander. Las herramientas de ingeniería eran las Navcam (cámaras de navegación: 2 cámaras monocromáticas CCD montadas junto a las PanCam, más internas que éstas, capaces de tomar imágenes más anchas que las de las panorámicas,
capaces de generar imágenes en tres dimensiones de la zona en la que se encuentre, y que serían usadas por los conductores y científicos para determinar la dirección hacia la que dirigir al MER), las Hazcam (Hazard-Identification Cameras, cámaras de identificación de peligros: eran cámaras CCD en blanco y negro con lentes de ojo de pez, colocadas 2 delante, 2 detrás, situadas en la caja de electrónica, y su amplio campo de visión proporcionado por estos objetivos proporcionaba una amplia perspectiva de la zona para echar una mano a la navegación por la superficie marciana, y a su vez el propio sistema de navegación autónomo del MER era capaz de usar por su cuenta las imágenes tomadas por estas cámaras para sus propios movimientos) y el
RAT, Herramienta de Abrasión de Rocas. Estaba formado por dos cuchillas con elementos de diamante para mayor eficacia. Cada cuchilla iba acoplada a un motor. Éstos eran contra rotantes a alta velocidad y proporcionaba una capacidad de penetración de cinco milímetros, y un diámetro de 4.5 centímetros, lo suficiente para retirar el polvillo y analizar exactamente su composición. Cada MER daba un peso en báscula de 174 kg., y estaban diseñados para funcionar con garantías durante 90 días marcianos.
Para el amartizaje sería usado el mismo sistema estrenado por
Mars Pathfinder. La estructura en forma de tetraedro usada por la sonda de 1997, en esta ocasión serviría para meter al MER, plegado sobre sí mismo y anclado a la base central con cerrojos y tuercas, de los que era liberado mediante unos sistemas pirotécnicos. Los pétalos estarían cerrados para protegerlo durante todas las fases de vuelo. Los airbags estarían por todas las caras exteriores del “saco”, como fue llamado. Una vez
desplegado, de los pétalos salían tres rampas fabricadas en vectrán, el mismo material en el que estaban elaborados los airbags, para facilitar el descenso del todoterreno al suelo. El saco fue fabricado en grafito-epoxi, para una mayor ligereza. Añadía una antena UHF para la transmisión de datos de ingeniería durante el proceso de descenso, y un radar altimétrico para conocer la altitud sobre la superficie a lo largo de la toma de Marte. Además, en uno de los laterales de la base del saco, fue acoplada una cámara de descenso llamada DIMES, o Subsistema de Imágenes para la Estimación del Movimiento en el Descenso, que adquiría tres instantáneas en blanco y negro desde 2.4 km. de altitud del área de aterrizaje, una vez el saco era descendido de la aerovaina por un cable, para proporcionar información sobre el movimiento horizontal durante el descenso y además dar contexto geológico del lugar de aterrizaje, para saber lo que había allí y para una mejor localización desde la órbita.
Si bien el proceso de amartizaje era idéntico al de
Mars Pathfinder, se tuvieron que hacer dos cambios fundamentales. Uno de ellos era el completo rediseño de los airbags. Tal como se diseñaron para 1997, eran muy eficaces, pero
Mars Pathfinder era una sonda estática que tenía acoplado en un pétalo al Sojourner. Sin embargo, los MER eran vehículos autopropulsados dentro de sacos de transporte de mayor tamaño que
Mars Pathfinder. Así, cuando hicieron las primeras pruebas, vieron que era necesario un cambio en su diseño para hacerlos absorber una mayor cantidad de fuerza para evitar que el MER en su interior no se soltara a causa del primer impacto. Tras múltiples pruebas, se encontró uno satisfactorio para la tarea, y se acopló a los sacos. El segundo afectaba al paracaídas. Uno de los lugares escogidos para el amartizaje se situaba dentro de un cráter, por lo que, a causa de sus paredes, las corrientes de aire en su interior serían distintas que en un lugar abierto. Se probaron varios tipos en un túnel de viento, hasta lograr el satisfactorio, capaz de resistir fuertes turbulencias y potentes rachas de viento. Con eso, el aterrizaje en el cráter era factible.
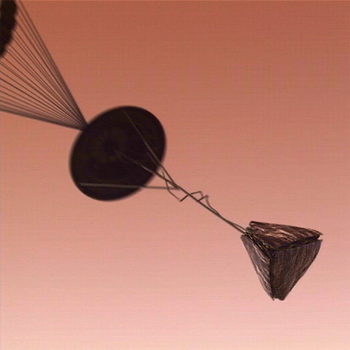
La fase de crucero derivaba directamente de la usada por
Mars Pathfinder. Una placa solar con forma de disco de 2.65 metros de diámetro, incluía el escáner estelar, el sensor solar y los medios de propulsión durante el viaje hacia Marte. En el centro de la etapa de crucero, en el disco del panel solar estaban las dos antenas, una de media ganancia y otra de baja ganancia. El conjunto, con la aerovaina, medía de alto 1.6 metros. Dentro de la aerovaina se encontraban tres cohetes (RAD, Descenso Asistido por Cohetes) que servían para las últimas fases del descenso, unido a la unidad de medición inercial del todoterreno. El paracaídas medía 15 metros de diámetro, y un mortero lo accionaba a una altitud de unos 8 kilómetros sobre la superficie. Un cable de 20 metros fabricado en Zylon (una fibra similar al Kevlar) unía el saco con el MER dentro a la aerovaina. Una vez todo fue unido, el peso del conjunto era de 1.062 kg.
Cada MER recibió una designación provisional. El primero en despegar fue denominado MER-A, también MER-2. Y como en el caso del Sojourner, fue lanzado un concurso en escuelas por todo el país para nombrarlos. Una vez terminado, tras un año con miles de nombres, el escogido para el MER-A llegará a ser simbólico:
Spirit. Fue elegida la propuesta de una niña de 9 años de Arizona llamada Sofi Collins, y obtuvo el privilegio de nombrar los dos MER, además de poder ver el lanzamiento desde el mismo Cabo Cañaveral.
El lanzamiento corrió a cargo de un
Delta 2-7925, uno de los cohetes más fiables de la NASA, estando programado para el 8 de junio del 2003. El 10 de junio, tras dos días de contingencias,
actuó impecablemente colocando a
Spirit en camino hacia su destino en el interior del cráter Gusev, en una elipse de 78 x 10.4 km. de extensión, más o menos en las coordenadas marcianas 14.6º S, 185.7º W. En el cráter Gusev se buscaban rocas sedimentarias, estratificación, rastros de interacción del suelo con el agua, sales fruto de la evaporación del agua, como en los desiertos, y minerales de carbonato. También se esperaba encontrar rastros de ceniza provenientes de los volcanes situados al norte, en la provincia de Elysium. La región fue fotografiada ampliamente gracias a la cámara MOC de
Mars Global Surveyor.
La travesía hacia Marte transcurrió sin problemas (la fase de crucero estaba estabilizada por giro, con una rotación nominal de 2 revoluciones por minuto) y llegado el mes de enero del 2004, todo estaba listo. El 25 de diciembre del 2003, otro intento de alcanzar la superficie, realizado por la europea Beagle 2, acabó en fracaso, por lo que la llegada de Spirit era bastante importante, tras dos intentos fallidos de dos.
El 4 de enero del 2004,
Spirit comenzó el proceso de entrada, descenso y amartizaje. Lo primero, orientar el escudo de reentrada para ofrecerlo hacia la atmósfera. Lo realizó durante 14 minutos usando los propulsores de la fase de crucero, 84 minutos antes de tocar las capas altas atmosféricas. Debido a que la placa solar de la etapa de crucero ya no alimentaba los sistemas de
Spirit, cinco baterías alojadas en el saco proporcionaban la energía necesaria. 15 minutos antes del contacto con la atmósfera, la fase de crucero era
expulsada, dejando listo al conjunto para el proceso. El primer contacto con la atmósfera lo realizó a 128 km. sobre la superficie marciana. Este fue el principal método de frenado, ya que durante el contacto directo con la atmósfera el MER redujo la velocidad efectivamente de 19.000 km/h hasta 1.600 km/h, soportando 6 G de deceleración. Consiguió atravesar la atmósfera, y a 8’5 km. de la superficie, el paracaídas se desplegó, dos segundos antes de lo previsto a causa de un adelgazamiento de la atmósfera, y el escudo de reentrada fue expulsado. Inmediatamente después, el
saco con
Spirit dentro fue descendido mediante el cable de 20 metros de Zylon, activando seguidamente el radar altimétrico. Tras la puesta en marcha del radar, la cámara DIMES actuó, tomando las tres imágenes
previstas en un intervalo de cuatro segundos. Estas imágenes ayudaron a calcular la velocidad horizontal en ese momento para después disparar unos pequeños propulsores colocados de manera transversal en la aerovaina para corregirla. A unos 300 metros de la superficie, unos explosivos unidos a generadores de gas provocaban el inflado de los airbags en milisegundos, y a unos 130 metros, los cohetes montados dentro de la aerovaina se
disparaban, provocando la deceleración final hasta alcanzar una velocidad vertical de 0 m/s. En ese momento el cable se cortaba y el saco, con los airbags inflados, caía a la superficie desde 15 metros de altitud, cayendo con fuerza, y provocando un primer salto de aproximadamente 8.4 metros. Durante los siguientes minutos estuvo rebotando hasta 27 veces hasta que finalmente se paró tras rodar por la superficie recorriendo unos 300 metros. Varios minutos después de detenerse, unos motores comenzaron a deshinchar los airbags, proceso que duró más o menos una hora. Cuando esto hubo terminado, inmediatamente se
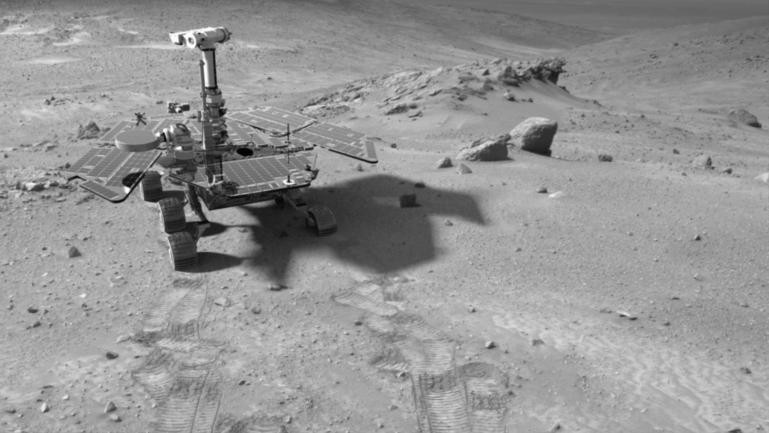
abrieron los pétalos. Una vez quedaron extendidos,
Spirit extendió sus paneles solares, mástil y antenas, y transmitió la señal de que había llegado sin novedad. El MER-A había alcanzado su destino, dentro del cráter Gusev en las coordenadas 14’6º S, 184’7º W. Justo después del despliegue de los paneles solares y transmitir sus primeras señales, las
Hazcam tomaron sus primeras imágenes para sus primeros vistazos.
Las primeras imágenes que nos envió nos mostraban una planicie llana y pedregosa, con varios montículos situados en la distancia. Las rocas, en general, eran de reducidas dimensiones, aunque en el área de aterrizaje había piedras de un mayor tamaño. Una pequeña depresión de apenas 9 metros de diámetro y carente de rocas llamó pronto la atención de los científicos. Su primera semana en la superficie la pasaría dentro del saco, probando el instrumental y chequeando los sistemas. Una vez todo estuvo comprobado, llegó la orden de bajar a la superficie. Para ello se levantó, desplegó sus ruedas delanteras, y luego giró sobre sí mismo para bajar por una de las
rampas situada a su derecha. Su primer punto de interés sería una roca alargada de forma casi piramidal llamada Adirondack. Antes de alcanzarla, comenzó a rodar por la superficie, para comprobar las capacidades de
Spirit en el suelo marciano. A punto de acercarse a la roca, en el Sol 18, la transmisión de radio se cortó abruptamente.
El susto en el centro de control fue mayúsculo. Al día siguiente se enviaron una serie de comandos para intentar recuperar el funcionamiento de Spirit, y consiguió una respuesta breve, y lo suficientemente clara para saber que se encontraba en modo seguro. Inmediatamente se le dio la orden de transmitir datos acerca de su estado, y la información enviada era errática e incompleta. Tras el análisis de estos datos, el programa de control se reescribió y fue transmitido al todoterreno, para arrancar usando la memoria RAM de su ordenador. El encendido esta vez fue correcto, y se pudo comprobar que el problema se situaba en la memoria flash. Cuando ésta fue investigada, vieron que estaban abiertos demasiados archivos a la vez, y muchos de ellos ya no eran útiles porque eran comandos usados durante el viaje y el descenso. La solución: un formateo de la memoria flash y una recarga con los archivos importantes. Para el Sol 33, Spirit volvía a estar en condiciones de operar. Cualquier malpensado (como este humilde cronista) podría pensar que esto fue provocado intencionadamente, ya que tres días después de surgir el problema con Spirit, Opportunity, su gemelo, llegaba a Marte, y había que dedicarle plena atención. Tonterías que se le ocurren a uno.
El RAT fue usado por primera vez en la misión en Adirondack, exponiendo a los instrumentos del IDD material del interior de la roca, para su análisis. Había funcionado excelentemente, profundizando unos dos milímetros en la roca. Una vez recogida la información necesaria, puso rumbo a un cráter cercano, que recibió el nombre de Bonneville. Por el camino estudió varias rocas curiosas, entre las que destacó
Humphrey, una piedra volcánica que mostraba señales de que la acción de algún fluido había trabajado en su formación. Gran parte de las rocas que rodeaban el cráter Bonneville eran parte de la eyecta expulsada tras el impacto que formó el agujero. Finalmente, tras 370 metros recorridos, en el Sol 82 llegó al borde del cráter, de unas dimensiones de 200 metros de diámetro y 10 de profundidad. Una vista del cráter tomada por las PanCam evidenciaban que el escudo de reentrada se encontraba en
el lado opuesto al de
Spirit, y que no había nada lo suficientemente interesante dentro del cráter como para arriesgarse a meter al rover allí. Con los 90 soles de funcionamiento cumplidos, y funcionando sin problemas, decidieron extender la misión de
Spirit, y poner rumbo a un conjunto de montículos que sobresalían al fondo, y que distaban de Bonneville unos 2.3 km. Esta pequeña cordillera recibió el nombre de
montes Columbia, en homenaje al transbordador destruido en febrero del 2003 cuando regresaba desde la órbita, y cada cima recibió el nombre de cada uno de los siete tripulantes que fallecieron aquel día.
El camino hacia los montes Columbia fue todo recto, dirección sur-sureste, y coincidía con otros dos pequeños cráteres, Missoula, alcanzado en el Sol 105, y
Lahontan, en el 118. Allí había rocas y formaciones que fueron considerados poco interesantes para los objetivos de la misión, y se centraron en su trayecto hacia la base de la pequeña cordillera. A mediados de junio, en el Sol 159 de estancia marciana, por fin logró alcanzar la falda de los montes, y se puso a trabajar con intensidad. Allí fue de roca a roca, y comenzó a subir hacia una de las cimas. Entre las rocas examinadas, destacaba
Clovis, cuyo aspecto daba la sensación de haber sido alterada de manera sustancial, y su análisis con el APXS demostró que agua líquida la había modificado durante largo tiempo. Tras estudiar otra roca, Marte entró en conjunción (es decir, que visto desde la Tierra, el planeta rojo queda detrás del Sol, y el contacto es imposible), un período que duró un par de semanas. Tras la recuperación del contacto continuó ascendiendo, y dando muestras de cierta fatiga.
Debido al largo tiempo de recorrido entre el cráter Bonneville hasta los montes Columbia, el motor de la rueda delantera derecha empezó a registrar elevados niveles de corriente eléctrica, provocando que el cable que unía el motor a la rueda sufriera cortocircuitos, por lo que la rueda quedó sin apenas uso. Esto propició un cambio de estrategia en el método de recorrer la superficie marciana. En vez de circular hacia delante, comenzó a avanzar de espaldas, para evitar mayor sufrimiento al motor fallón. De esa manera, Spirit continuó ascendiendo, para acabar el año en las cercanías de una formación llamada El Mirador de Larry.
Tras cumplir un año desde su llegada al planeta rojo, el todoterreno siguió examinando las cercanías del Mirador de Larry, así como otras localizaciones, llamadas Cumberland Ridge y Tennessee Valley. Fue en ese momento cuando decidieron que
Spirit subiera al pico más alto de los montes Columbia, la cima Husband. Continuando el camino de subida, la rueda delantera derecha dejó de girar. Lo único que podía hacer era arrastrarla y, curiosa e irónicamente, esto provocó que desenterrara un estrato del terreno rico en fósforo, minerales sulfatados e hidratados ricos en hierro y magnesio, así como enormes cantidades de sales, en una concentración no vista allí. A este lugar se le llamó
Paso Robles. Y todo a medida que ascendía.
El gran enemigo de los MER era el polvo en suspensión, que gradualmente quedaba posado sobre los paneles solares, reduciendo así su capacidad generadora de energía. A las alturas de la misión en que se encontraba en el momento de la localización Paso Robles, un remolino de polvo pasó por encima de
Spirit en la noche del 9 de marzo del 2005, aumentando la eficiencia de los paneles solares del 60% al 90%. Gracias a esto, era posible una nueva extensión de la misión durante varios meses. A partir de
entonces, los controladores de la misión desearon que otros remolinos actuaran de la misma manera a lo largo de la misión. Además, se esperaba que las cámaras del todoterreno observaran los movimientos de los remolinos desde su elevada posición, y desde luego no quedamos defraudados.
El 21 de agosto, por fin,
Spirit, con su tren de rodaje al fin plenamente operativo, alcanzó la cima Husband en los montes Columbia. Allí quedó durante unos días, y gracias a la elevada cifra energética provocada por las limpiezas, realizó una serie de campañas de
observación nocturna, destinadas a estudiar la circulación atmosférica por la noche, además de observar las estrellas en el firmamento y seguir el movimiento de los satélites Fobos y Deimos. En ese momento, la pregunta fue: ¿hacia dónde vamos ahora?
Gracias a las imágenes de alta resolución del MOC de
Mars Global Surveyor, vieron una zona de terreno brillante, aparentemente libre de talco marciano, y se suponía en ese momento que era una formación volcánica.
Spirit sería el encargado de resolver la duda, bajando por un terreno bastante complicado. En el intervalo, el todoterreno cumplió un año marciano de estancia en el cráter Gusev, y los controladores dieron varias imágenes a especialistas de efectos especiales para las películas de Hollywood, con el encargo de que el
MER apareciera en ellas. El resultado fue memorable.
A lo largo de su tercer año de funcionamiento marciano, fue descendiendo con tiento de la cima Husband hacia esa placa de terreno, llamada Home Plate por los científicos. Gran parte del camino ya lo había recorrido en los meses finales del 2005, y a mitad de febrero del 2006 había alcanzado la esquina norte de esa formación. Antes, en una planicie arenosa y ausente de rocas, la rueda delantera derecha, cuyo motor había fallado definitivamente semanas antes, abrió un surco como el creado en Paso Robles, encontrando una nueva formación con sales. El invierno marciano se acercaba, y optaron
por que
Spirit pasara el invierno en una localización cercana al Home Plate nombrada McCool Hill, manteniéndole en una pendiente pronunciada para garantizar la máxima insolación a los paneles solares. Tuvo que subir al Home Plate, para atravesarlo, para luego intentar llegar allí. Sin embargo, el terreno era demasiado complicado a causa de que había mucha arena suelta en las cercanías, por lo que decidieron ubicarlo en otra posición inclinada 11º, llamada Low Ridge Haven. Allí pasó los siguientes 8 meses.
A pesar de la inmovilidad forzada por la falta de energía, examinó con el RAT y sus instrumentos el suelo que lo rodeaba. Además, utilizando las PanCam, examinaron el lugar múltiples veces con sus filtros. Varias rocas llamaban la atención por su color y su aspecto, haciendo sospechar a los científicos que eran meteoritos, como los vistos por
Opportunity. Allí, celebró que había alcanzado la asombrosa cifra de 1000 Soles continuados de funcionamiento en Marte. En diciembre del 2006, con energía suficiente, retomó los movimientos, hacia las rocas de aspecto meteorítico.
En esos primeros movimientos, volvía a arrastrar la rueda fallona, y abrió una profunda zanja de material claro. Analizándola en profundidad, descubrieron que era inmensamente rica en sílice, el material principal en la fabricación del cristal, en una concentración del 90%. Tal concentración solo se da en la Tierra en lugares en que el agua está a mucha temperatura, o el vapor de puntos calientes entra en contacto con rocas volcánicas, mostrando evidencias de unas condiciones ideales para la vida microbiana. Tras esto, volvió sus miradas de nuevo al Home Plate. Hasta junio del 2007 no volvió a rodar por encima de esta formación.
Desde la órbita, la especializada cámara MARCI montada en
Mars Reconnaissance Orbiter, llegada en marzo del 2006, comenzó a observar, a finales de junio de ese año, cómo varias nubes cargadas de polvo empezaban a formarse. Fue el germen de una brutal tormenta que engulló el planeta por completo el 20 de julio. Los MER, cuya fuente de energía era la que capturaba del Sol, y sobre todo, que nadie se esperaba que llegaran a funcionar tanto tiempo por allá (en ese momento llevaban tres años y medio), se vieron afectados de lleno, más
Opportunity que
Spirit. En el cráter Gusev, si bien la opacidad de la atmósfera se redujo drásticamente, no dejó de funcionar en ningún momento. Para el mes de agosto, los cielos empezaron a clarear, y las actividades en el Home Plate por fin se iniciaron, aunque el polvo
acumulado en los paneles solares impedía que recogiera una cantidad de energía decente. En el intervalo, Spirit había superado los 1290 Soles de funcionamiento, superando así la cifra de misión del
Viking Lander 2 en Utopia Planitia. Un hito impensable al principio de la misión.
La capa de talco marciano en los paneles solares de
Spirit era casi incompatible para su supervivencia, y con el fin del verano marciano dirigieron al todoterreno hacia el límite norte del Home Plate para volverlo a inclinar lo necesario para que el nivel energético aumentara. Todo el año 2008 lo pasó en el Winter Haven del Home Plate, donde una tormenta local de polvo le tocó con intensidad en noviembre, y luego, una nueva conjunción impidió el contacto con el centro de control. Para el 2009 se esperaba que pudiera salir de allí y dirigirse hacia dos lugares interesantes, llamados Von Braun y Goddard, ya que se sospechaba que uno de ellos fuera un respiradero volcánico. Por fin, en febrero bajó de donde estaba, y empezó a recorrer el lado oeste del Home Plate porque en su estado era incapaz de atravesarlo. Además, entre febrero y abril, varios remolinos limpiaron parte del talco acumulado en los paneles solares, aunque aún quedaba una capa espesa. Sin embargo, el 1 de mayo, mientras recorría el terreno blando situado al lado del Home Plate, las ruedas del lado izquierdo quedaron
atrapadas en el profundo talco de la zona.
Con los experimentos del IDD, investigó el terreno blando y suelto, observando que era sulfato de hierro, también conocido como jarosita, un mineral con una ínfima cohesión, provocando que las ruedas del lado izquierdo carecieran del agarre necesario para salir de allí. De inmediato, en el JPL empezaron a realizar pruebas con un modelo de prueba metido en un cajón de arena, para simular las condiciones. Tras varios meses de continuos tests, se llegó a la conclusión de que podría ser factible extraer a
Spirit de ese banco de arena. En el intervalo, había superado los 2000 soles de funcionamiento allí atrapado, estudiando el terreno en el que se encontraba, y víctima del talco, que seguía posándose. Había una fecha límite, ya que o se extraía, o se esperaba una limpieza de los paneles por parte de los remolinos de la zona, o el vehículo se quedaba allí para siempre. El 17 de noviembre, la estrategia empezó, provocando que las ruedas intentaran un breve movimiento de espaldas. Nuevos intentos se produjeron durante el resto del mes, y el 28, el motor de la rueda trasera derecha falló de la misma manera que lo hizo el de la delantera. Un test de funcionamiento practicado a principios de diciembre en el grupo motor ofreció la sorpresa de que la rueda delantera derecha comenzó a funcionar normalmente. Realizaron otras tres pruebas, y en la última, la rueda ya no respondió más. Habían conseguido desplazar unos centímetros hacia atrás a
Spirit, pero con cuatro ruedas operativas, el movimiento era ya imposible. La decisión fue que era mejor dejarlo donde estaba, en la denominada ubicación Troy, y comenzar la tarea como vehículo estático.
Así inició el que sería el sexto y último año de operación. Entre los objetivos buscados como plataforma estacionaria estaba el estudio de los datos de telemetría de la misma manera que fueron estudiados durante la misión de
Mars Pathfinder. Para complementar las mediciones llevadas a cabo en 1997 eran necesarios seis meses de transmisión directa hacia las antenas terrestres. Pero antes tenía que sobrevivir al nuevo invierno, e intentaron durante enero y febrero del 2010 colocarlo en una inclinación favorable para recoger la energía necesaria. A pesar de esto, la misión estaba condenada.
A lo largo del mes de marzo, el nivel energético producido por los paneles solo era suficiente para enviar breves señales a lo largo del día, por lo que programaron a Spirit para que semanalmente enviara una señal indicadora de que aún estaba ahí. Su última transmisión fue recibida el 22 de marzo, en el Sol 2210, y ese fue su canto de cisne. El 30 de marzo, la señal prevista ya no se recibió.
Se sospechaba que el nivel energético era tan escaso que el ordenador de a bordo había activado el modo de hibernación de baja energía, y se esperaba que, o bien una limpieza, o bien una mayor insolación, revitalizara a Spirit. Primero se pensó que podría volver en octubre, y cuando esa fecha pasó, informaron que se esperaba que en marzo del 2011, cuando Marte estaba en el solsticio de verano, con los máximos niveles de insolación, el transmisor volviera a encenderse. Durante todo este tiempo, enviaron los comandos tanto directamente hacia el vehículo, como usando los relés UHF de Mars Odyssey y de Mars Reconnaissance Orbiter. No se recibió ninguna respuesta.
La noticia llegó el 25 de mayo del 2011: esa misma noche se enviaría por última vez el comando de activación de
Spirit. Una impresionante imagen de la cámara HiRISE de MRO dejaba claro que los paneles solares del MER estaban limpios como la patena, pero el invierno había cobrado su peaje. Al no tener suficiente energía para funcionar, los calentadores dejaron de recibir electricidad, por lo que las sensibles electrónicas sucumbieron al crudo clima del planeta. Ese día, la misión de
Spirit fue declarada terminada oficialmente, y los controladores de
Spirit se unieron a los de
Opportunity, dejando libre la sala de control para que la ocuparan los miembros adscritos al nuevo proyecto de todoterreno marciano que fue enviado en noviembre del 2011 hacia el planeta rojo:
Curiosity. Al final de su misión
Spirit había recorrido 7730.48 metros.
Esta ha sido una de las misiones más extraordinarias de las realizadas en el planeta rojo. Superó con creces su tiempo nominal de misión de 90 Soles, fijando la, hasta ahora, tercera marca de tiempo de trabajo transcurrido, solo superados por el Viking Lander 1 (con la segunda marca) y por Opportunity. Durante todo este tiempo, ha encontrado pruebas definitivas de la acción del agua en el suelo de Marte y de la existencia pasada de una atmósfera de una mayor densidad, rastros de que allí existieron manantiales termales, prácticamente en ebullición, evidencias de algún tipo de ciclo activo del agua, ha realizado estudios de astronomía (incluyendo la observación de varios eclipses de los satélites marcianos) y es, por el momento, el único vehículo autopropulsado que ha ascendido una cumbre en otro planeta. Su periodo prolongado de estancia marciana ha supuesto un gran avance en la tecnología del software de navegación autónoma, convirtiendo a los MER en rovers totalmente autónomos en sus decisiones en cuanto a los caminos a tomar, un software que sin duda incluirá Curiosity. Y desde luego, ha vuelto a dar la vuelta a todo lo que sabemos sobre la geología del planeta y su evolución a lo largo de los milenios. Sin duda, una labor que pasará a la historia.
Spirit, además, ha dado pie a muchos homenajes. En el saco de transporte existe una placa que conmemora la pérdida del transbordador
Columbia, así como a la tripulación que llevaba, correspondiente a la misión STS-107, mientras que el lugar en el que cayó fue bautizado como Estación Memorial Columbia. También están los
montes Columbia, que el vehículo ascendió y atravesó, y el homenaje final es el complejo de las
cimas Apollo, que conmemoran a los tres astronautas que fallecieron incinerados durante las pruebas de la cápsula
Apollo 1, el 27 de enero de 1967.
Spirit también recibió su homenaje. Para conmemorar su gran contribución a la investigación marciana, el asteroide 37452 lleva su nombre. Y desde aquí, este homenaje nuestro. No merece otra cosa.





{kind=link}




 previstas en un intervalo de cuatro segundos. Estas imágenes ayudaron a calcular la velocidad horizontal en ese momento para después disparar unos pequeños propulsores colocados de manera transversal en la aerovaina para corregirla. A unos 300 metros de la superficie, unos explosivos unidos a generadores de gas provocaban el inflado de los airbags en milisegundos, y a unos 130 metros, los cohetes montados dentro de la aerovaina se disparaban, provocando la deceleración final hasta alcanzar una velocidad vertical de 0 m/s. En ese momento el cable se cortaba y el saco, con los airbags inflados, caía a la superficie desde 15 metros de altitud, cayendo con fuerza, y provocando un primer salto de aproximadamente 8.4 metros. Durante los siguientes minutos estuvo rebotando hasta 27 veces hasta que finalmente se paró tras rodar por la superficie recorriendo unos 300 metros. Varios minutos después de detenerse, unos motores comenzaron a deshinchar los airbags, proceso que duró más o menos una hora. Cuando esto hubo terminado, inmediatamente se abrieron los pétalos. Una vez quedaron extendidos, Spirit extendió sus paneles solares, mástil y antenas, y transmitió la señal de que había llegado sin novedad. El MER-A había alcanzado su destino, dentro del cráter Gusev en las coordenadas 14’6º S, 184’7º W. Justo después del despliegue de los paneles solares y transmitir sus primeras señales, las Hazcam tomaron sus primeras imágenes para sus primeros vistazos.
previstas en un intervalo de cuatro segundos. Estas imágenes ayudaron a calcular la velocidad horizontal en ese momento para después disparar unos pequeños propulsores colocados de manera transversal en la aerovaina para corregirla. A unos 300 metros de la superficie, unos explosivos unidos a generadores de gas provocaban el inflado de los airbags en milisegundos, y a unos 130 metros, los cohetes montados dentro de la aerovaina se disparaban, provocando la deceleración final hasta alcanzar una velocidad vertical de 0 m/s. En ese momento el cable se cortaba y el saco, con los airbags inflados, caía a la superficie desde 15 metros de altitud, cayendo con fuerza, y provocando un primer salto de aproximadamente 8.4 metros. Durante los siguientes minutos estuvo rebotando hasta 27 veces hasta que finalmente se paró tras rodar por la superficie recorriendo unos 300 metros. Varios minutos después de detenerse, unos motores comenzaron a deshinchar los airbags, proceso que duró más o menos una hora. Cuando esto hubo terminado, inmediatamente se abrieron los pétalos. Una vez quedaron extendidos, Spirit extendió sus paneles solares, mástil y antenas, y transmitió la señal de que había llegado sin novedad. El MER-A había alcanzado su destino, dentro del cráter Gusev en las coordenadas 14’6º S, 184’7º W. Justo después del despliegue de los paneles solares y transmitir sus primeras señales, las Hazcam tomaron sus primeras imágenes para sus primeros vistazos.{kind=link}
{kind=link}

{kind=link}
{kind=link}
{kind=link}

{kind=link}

{kind=link}

{kind=link}
{kind=link}
{kind=link}

{kind=link}
 entonces, los controladores de la misión desearon que otros remolinos actuaran de la misma manera a lo largo de la misión. Además, se esperaba que las cámaras del todoterreno observaran los movimientos de los remolinos desde su elevada posición, y desde luego no quedamos defraudados.
entonces, los controladores de la misión desearon que otros remolinos actuaran de la misma manera a lo largo de la misión. Además, se esperaba que las cámaras del todoterreno observaran los movimientos de los remolinos desde su elevada posición, y desde luego no quedamos defraudados.
{kind=link}

{kind=link}
 por que Spirit pasara el invierno en una localización cercana al Home Plate nombrada McCool Hill, manteniéndole en una pendiente pronunciada para garantizar la máxima insolación a los paneles solares. Tuvo que subir al Home Plate, para atravesarlo, para luego intentar llegar allí. Sin embargo, el terreno era demasiado complicado a causa de que había mucha arena suelta en las cercanías, por lo que decidieron ubicarlo en otra posición inclinada 11º, llamada Low Ridge Haven. Allí pasó los siguientes 8 meses.
por que Spirit pasara el invierno en una localización cercana al Home Plate nombrada McCool Hill, manteniéndole en una pendiente pronunciada para garantizar la máxima insolación a los paneles solares. Tuvo que subir al Home Plate, para atravesarlo, para luego intentar llegar allí. Sin embargo, el terreno era demasiado complicado a causa de que había mucha arena suelta en las cercanías, por lo que decidieron ubicarlo en otra posición inclinada 11º, llamada Low Ridge Haven. Allí pasó los siguientes 8 meses. 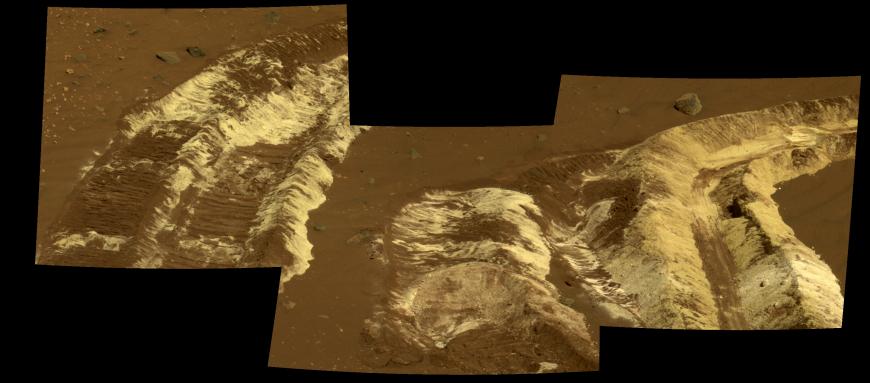

 acumulado en los paneles solares impedía que recogiera una cantidad de energía decente. En el intervalo, Spirit había superado los 1290 Soles de funcionamiento, superando así la cifra de misión del Viking Lander 2 en Utopia Planitia. Un hito impensable al principio de la misión.
acumulado en los paneles solares impedía que recogiera una cantidad de energía decente. En el intervalo, Spirit había superado los 1290 Soles de funcionamiento, superando así la cifra de misión del Viking Lander 2 en Utopia Planitia. Un hito impensable al principio de la misión.

{kind=link}




{kind=link}
Este comentario ha sido eliminado por el autor.
ResponderEliminarEste comentario ha sido eliminado por el autor.
ResponderEliminarEste comentario ha sido eliminado por el autor.
ResponderEliminarEste comentario ha sido eliminado por el autor.
ResponderEliminar