
La galaxia M83, desde el Hubble.

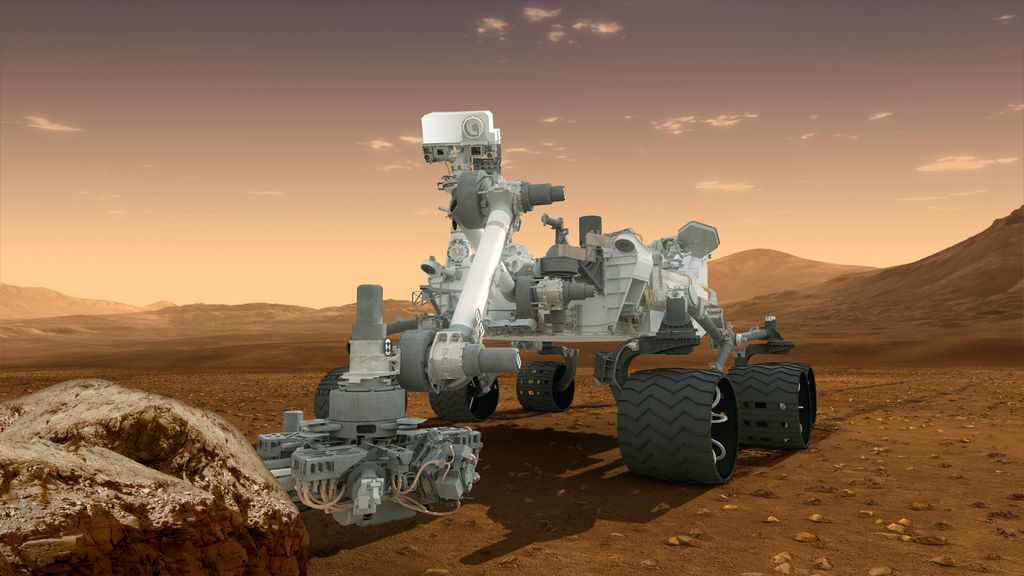 Al igual que los dos MER, en Curiosity se ha montado un brazo en cuyo final se han montado varios instrumentos científicos y herramientas. Mientras que en Opportunity, el único todoterreno funcional que todavía anda por la superficie marciana, posee una micro cámara, dos espectrómetros y una herramienta para rascar rocas, el gran Mars Science Laboratory incorpora una micro cámara a color (MAHLI, que ya obtuvo tomas durante el viaje de crucero) y un espectrómetro (APXS), junto con tres herramientas para la preparación, adquisición y procesado de las muestras de las rocas. Estos cinco elementos están situados en la torreta, que es como se llama la plataforma sobre la que se han colocado. Las tres herramientas conforman el llamado subsistema de adquisición, manejo y procesado de muestras, o SA/SPaH. El principal es el PADS, sistema de taladro de adquisición y rotura, que es un taladro percutor que perfora la roca adquiriendo una muestra de 5 centímetros de largo y de hasta 1.6 de diámetro. A la vez que va perforando, el taladro va pulverizando la muestra, hasta un tamaño admisible para que los instrumentos analíticos SAM y CheMin puedan estudiarlos en detalle. Esta muestra acaba en un pequeño compartimento dentro del taladro para llevarlo a otra de las herramientas. Si la primera broca acaba atascada, el sistema es capaz de desengancharla, para sustituirla
Al igual que los dos MER, en Curiosity se ha montado un brazo en cuyo final se han montado varios instrumentos científicos y herramientas. Mientras que en Opportunity, el único todoterreno funcional que todavía anda por la superficie marciana, posee una micro cámara, dos espectrómetros y una herramienta para rascar rocas, el gran Mars Science Laboratory incorpora una micro cámara a color (MAHLI, que ya obtuvo tomas durante el viaje de crucero) y un espectrómetro (APXS), junto con tres herramientas para la preparación, adquisición y procesado de las muestras de las rocas. Estos cinco elementos están situados en la torreta, que es como se llama la plataforma sobre la que se han colocado. Las tres herramientas conforman el llamado subsistema de adquisición, manejo y procesado de muestras, o SA/SPaH. El principal es el PADS, sistema de taladro de adquisición y rotura, que es un taladro percutor que perfora la roca adquiriendo una muestra de 5 centímetros de largo y de hasta 1.6 de diámetro. A la vez que va perforando, el taladro va pulverizando la muestra, hasta un tamaño admisible para que los instrumentos analíticos SAM y CheMin puedan estudiarlos en detalle. Esta muestra acaba en un pequeño compartimento dentro del taladro para llevarlo a otra de las herramientas. Si la primera broca acaba atascada, el sistema es capaz de desengancharla, para sustituirla 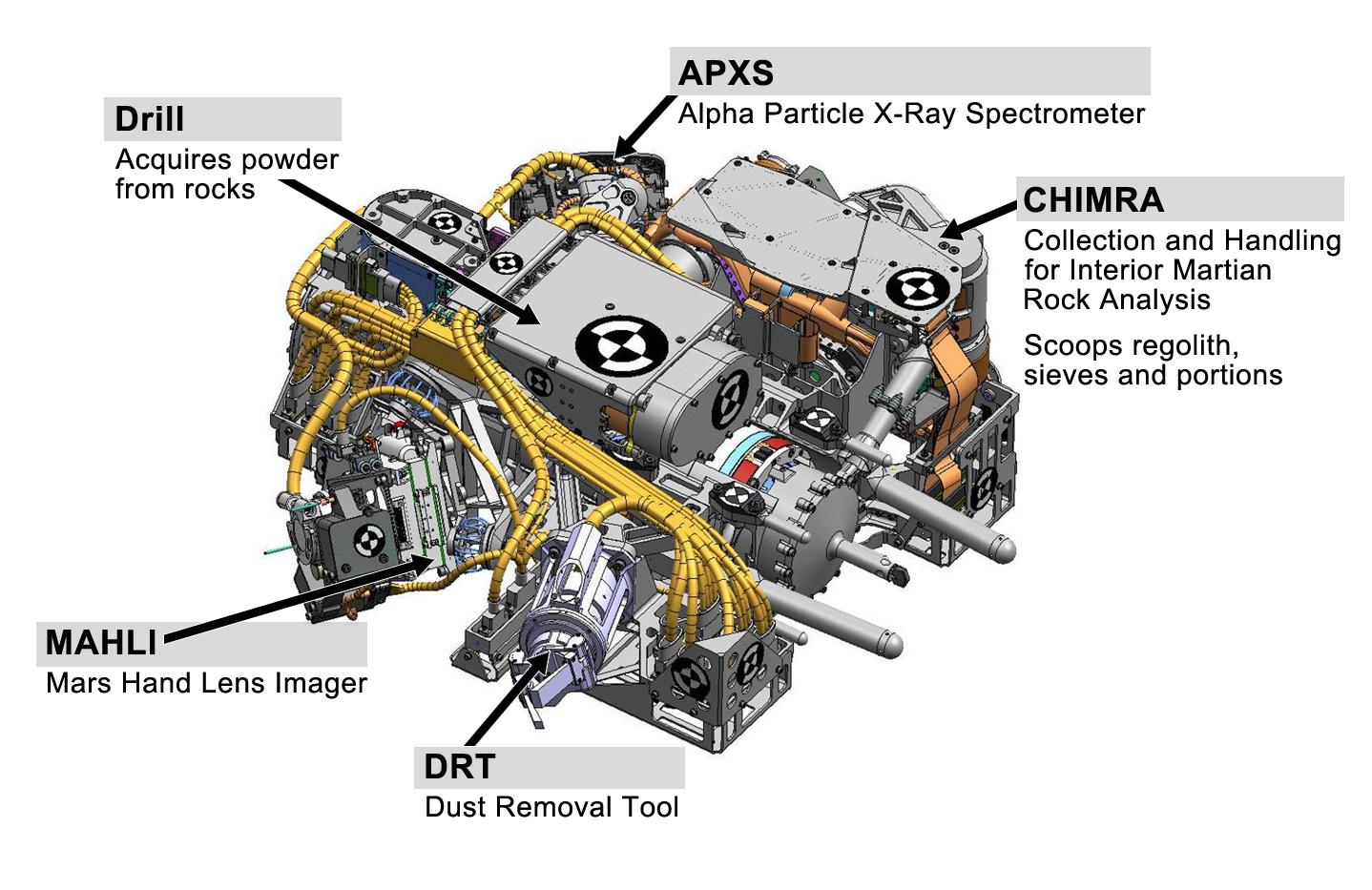
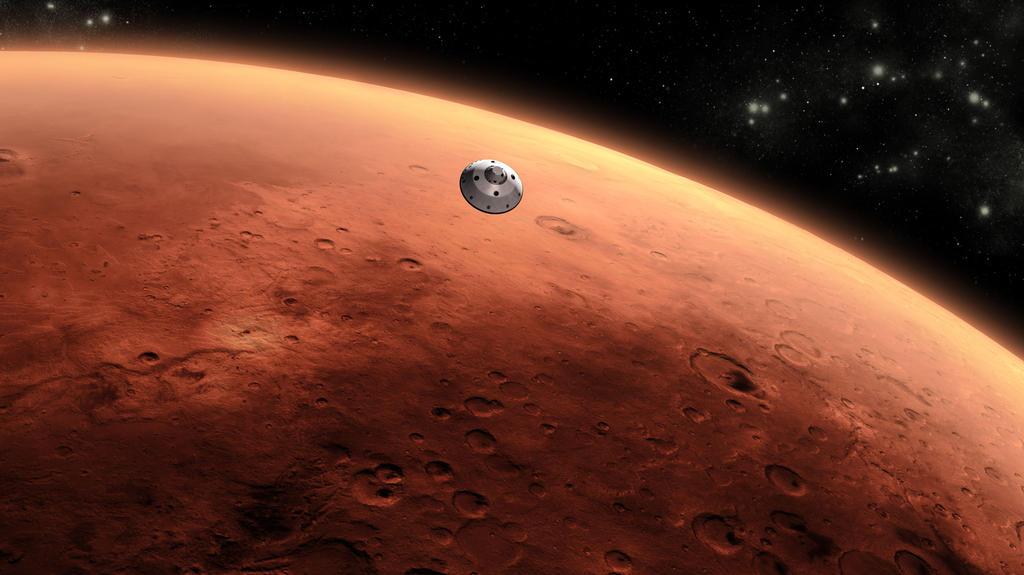
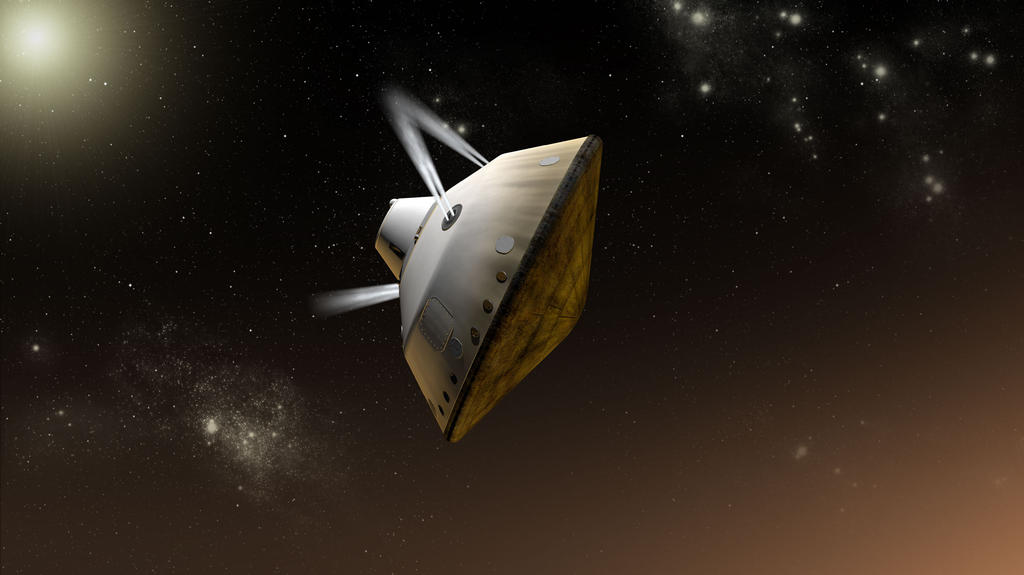 maniobra. A lo largo del cruce de la atmósfera, se espera un pico de temperatura de 2.100º C, y una deceleración máxima de hasta 15 G. Cuando la maniobra de entrada guiada finaliza, y la atmósfera es superada, comienza a prepararse para las últimas fases. Lo primero, expulsar seis nuevas masas de tungsteno de 25 kg. cada una para volver a colocar el centro de gravedad en el eje central, para después desplegar el paracaídas. Éste, de 16 metros de diámetro, se desplegará a 11 km. sobre la superficie. A su vez, la antena UHF situada en el contenedor del paracaídas comenzará a emitir datos de ingeniería hacia los orbitadores, para que éstos lo retransmitan a la Tierra. 24 segundos después del completo despliegue del paracaídas, el escudo de reentrada se expulsa, activando a la vez la cámara MARDI, cuya primera tarea es equilibrar los balances de blanco usando un pequeño objetivo situado dentro del propio escudo. En ese momento comienza a adquirir secuencias para la posterior construcción de un vídeo del descenso. Además, el radar de altitud comienza a trabajar para informar de la distancia al suelo. 85 segundos después de expulsar el escudo, Curiosity, con su “mochila cohete”, se separa de la aerovaina, y los motores acelerables (del mismo tipo que los usados por las Viking Lander) se ponen en marcha, a una altitud de 1.6 km., y poniendo en marcha una antena UHF para tomar el relevo de la de la aerovaina. Tras conseguir una velocidad de descenso estable de 0.75 m/s., continúa descendiendo, hasta que los elementos del Sky Crane se preparan. Posee de dos carretes, uno que posee un cable de datos entre la mochila cohete y el todoterreno, y otro con tres cables de unión, con capacidad de descender a Curiosity hasta siete metros del conjunto. Un pequeño elemento permite descender ambos sistemas a la vez, para equilibrar por completo este proceso. Justo antes de bajar el todoterreno, cuatro de los ocho motores de la mochila cohete serán apagados, para que con su chorro no dañe al vehículo. Entonces, a 20 metros del suelo, el Sky Crane desciende a Curiosity, provocando a su vez la extensión del sistema de suspensión y las ruedas, que actúan también como tren de aterrizaje. Cuando los sensores a bordo del todoterreno sienten completo contacto, los cables se cortan, y el sistema de descenso propulsado se aleja de Curiosity, cayendo a unos 150 metros de distancia. Ya antes, la antena UHF Electra del propio vehículo comenzó a trabajar cuando fue descendido, sustituyendo a la de la mochila propulsora. Entonces, cuando ya está en la misma superficie, emitirá la señal de que ha llegado sin novedad a la superficie.
maniobra. A lo largo del cruce de la atmósfera, se espera un pico de temperatura de 2.100º C, y una deceleración máxima de hasta 15 G. Cuando la maniobra de entrada guiada finaliza, y la atmósfera es superada, comienza a prepararse para las últimas fases. Lo primero, expulsar seis nuevas masas de tungsteno de 25 kg. cada una para volver a colocar el centro de gravedad en el eje central, para después desplegar el paracaídas. Éste, de 16 metros de diámetro, se desplegará a 11 km. sobre la superficie. A su vez, la antena UHF situada en el contenedor del paracaídas comenzará a emitir datos de ingeniería hacia los orbitadores, para que éstos lo retransmitan a la Tierra. 24 segundos después del completo despliegue del paracaídas, el escudo de reentrada se expulsa, activando a la vez la cámara MARDI, cuya primera tarea es equilibrar los balances de blanco usando un pequeño objetivo situado dentro del propio escudo. En ese momento comienza a adquirir secuencias para la posterior construcción de un vídeo del descenso. Además, el radar de altitud comienza a trabajar para informar de la distancia al suelo. 85 segundos después de expulsar el escudo, Curiosity, con su “mochila cohete”, se separa de la aerovaina, y los motores acelerables (del mismo tipo que los usados por las Viking Lander) se ponen en marcha, a una altitud de 1.6 km., y poniendo en marcha una antena UHF para tomar el relevo de la de la aerovaina. Tras conseguir una velocidad de descenso estable de 0.75 m/s., continúa descendiendo, hasta que los elementos del Sky Crane se preparan. Posee de dos carretes, uno que posee un cable de datos entre la mochila cohete y el todoterreno, y otro con tres cables de unión, con capacidad de descender a Curiosity hasta siete metros del conjunto. Un pequeño elemento permite descender ambos sistemas a la vez, para equilibrar por completo este proceso. Justo antes de bajar el todoterreno, cuatro de los ocho motores de la mochila cohete serán apagados, para que con su chorro no dañe al vehículo. Entonces, a 20 metros del suelo, el Sky Crane desciende a Curiosity, provocando a su vez la extensión del sistema de suspensión y las ruedas, que actúan también como tren de aterrizaje. Cuando los sensores a bordo del todoterreno sienten completo contacto, los cables se cortan, y el sistema de descenso propulsado se aleja de Curiosity, cayendo a unos 150 metros de distancia. Ya antes, la antena UHF Electra del propio vehículo comenzó a trabajar cuando fue descendido, sustituyendo a la de la mochila propulsora. Entonces, cuando ya está en la misma superficie, emitirá la señal de que ha llegado sin novedad a la superficie.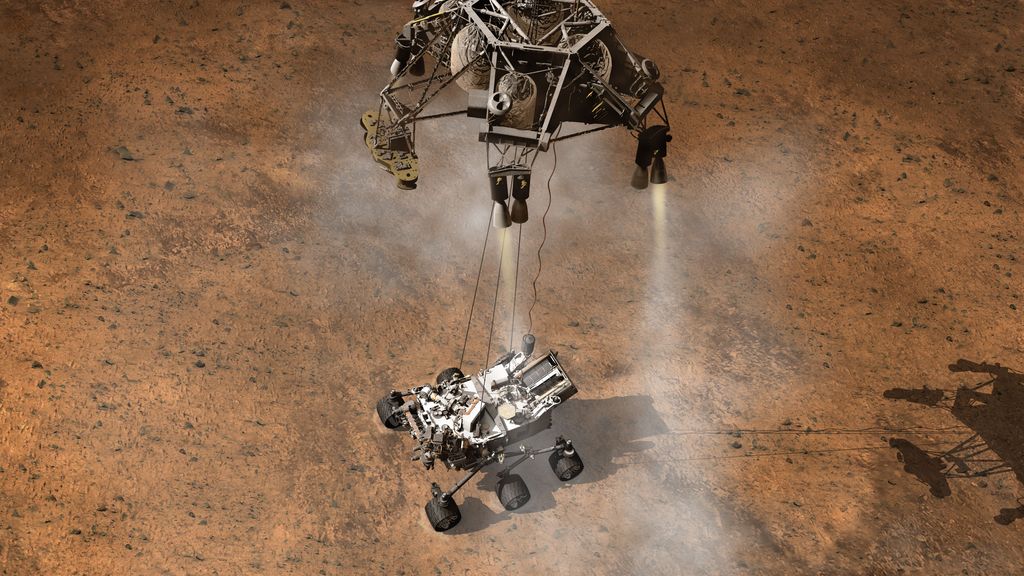
 ineralógicos, así como estudiar la atmósfera y averiguar si había campo magnético en el planeta, y además montaba una cámara muy mejorada respecto a las de las Viking, que sobre todo servirían para descartar zonas peligrosas para las sondas futuras de superficie. Cuando la Mars Observer se perdió, se habían perdido 8 años de trabajo. Con la nueva filosofía que llegó a la NASA, se pidió que se fabricara una nueva sonda que montara, si no todos, la mayoría de experimentos de la Mars Observer. Debería estar lista en 1996 para su lanzamiento.
ineralógicos, así como estudiar la atmósfera y averiguar si había campo magnético en el planeta, y además montaba una cámara muy mejorada respecto a las de las Viking, que sobre todo servirían para descartar zonas peligrosas para las sondas futuras de superficie. Cuando la Mars Observer se perdió, se habían perdido 8 años de trabajo. Con la nueva filosofía que llegó a la NASA, se pidió que se fabricara una nueva sonda que montara, si no todos, la mayoría de experimentos de la Mars Observer. Debería estar lista en 1996 para su lanzamiento. su hermana mayor. De tamaño modesto, era una elegante sonda, con unas medidas de 1'2 x 1'2 x 1'8 metros en su estructura, y portaba dos paneles solares a cada lado que, una vez extendidos, le proporcionaban una envergadura de 12 metros. Equipa tres tipos de antenas: la de alta ganancia, de 1'5 metros y omnidireccional, situada al final de un mastil de dos metros, la de media ganancia, para toda la etapa de crucero, entrada en órbita y aerofrenado, y la de baja ganancia, para emergencias. Para la entrada en órbita montaba el motor principal, y para las maniobras un juego de propulsores en cada esquina de la estructura de la sonda. Cuatro grabadores de estado sólido proporcionaban una capacidad de almacenamiento de aproximadamente 0'75 Gigabytes de información de los experimentos, que son los siguientes: MOC, o cámara del orbitador marciano, es en realidad un conjunto de tres cámaras. La principal es la cámara de ángulo cercano, que es un potente objetivo de alta resolución en blanco y negro adosado a una matriz CCD que realiza imágenes con unas medidas de 1'5 x 10 km., con una resolución máxima de 1'4 metros, siendo capaz de distinguir objetos del tamaño de una mesa de comedor. Esta cámara se acomoda dentro de un cilindro de 80 centímetros de largo y 40 de ancho. En uno de los laterales exteriores del
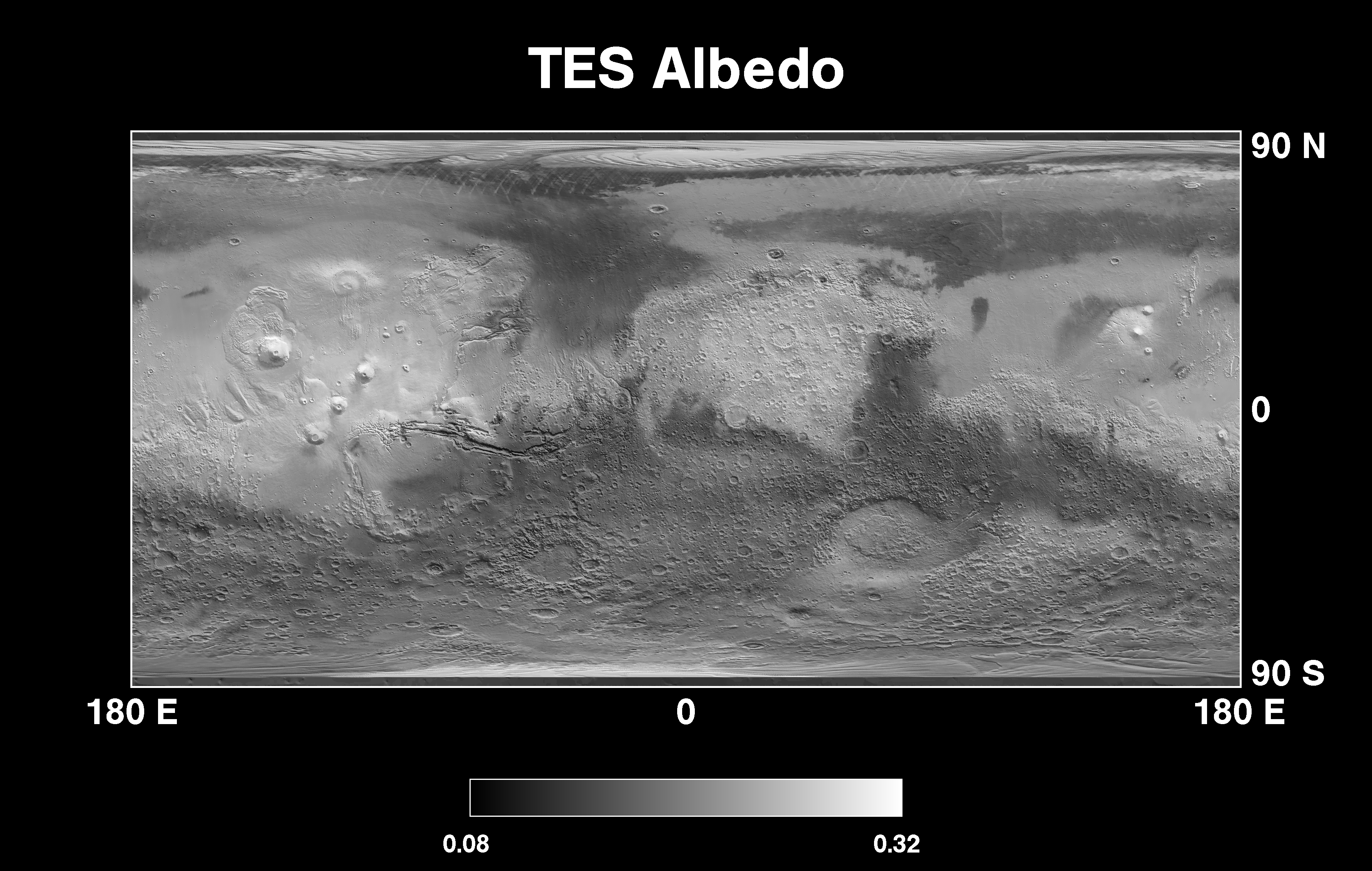
su hermana mayor. De tamaño modesto, era una elegante sonda, con unas medidas de 1'2 x 1'2 x 1'8 metros en su estructura, y portaba dos paneles solares a cada lado que, una vez extendidos, le proporcionaban una envergadura de 12 metros. Equipa tres tipos de antenas: la de alta ganancia, de 1'5 metros y omnidireccional, situada al final de un mastil de dos metros, la de media ganancia, para toda la etapa de crucero, entrada en órbita y aerofrenado, y la de baja ganancia, para emergencias. Para la entrada en órbita montaba el motor principal, y para las maniobras un juego de propulsores en cada esquina de la estructura de la sonda. Cuatro grabadores de estado sólido proporcionaban una capacidad de almacenamiento de aproximadamente 0'75 Gigabytes de información de los experimentos, que son los siguientes: MOC, o cámara del orbitador marciano, es en realidad un conjunto de tres cámaras. La principal es la cámara de ángulo cercano, que es un potente objetivo de alta resolución en blanco y negro adosado a una matriz CCD que realiza imágenes con unas medidas de 1'5 x 10 km., con una resolución máxima de 1'4 metros, siendo capaz de distinguir objetos del tamaño de una mesa de comedor. Esta cámara se acomoda dentro de un cilindro de 80 centímetros de largo y 40 de ancho. En uno de los laterales exteriores del  cilindro de la cámara principal se encuentran las otras dos de campo ancho, la roja, para imágenes de contexto, con una resolución máxima de 250 metros, y la azul, para tomas globales, de una resolución máxima de 7'5 km., para monitorizar el planeta y la atmósfera diariamente. Estas dos cámaras comparten la matriz CCD y parte del objetivo. La cámara azul trabaja realizando escaneos, generando "tiras" de imágenes que cada vez que el planeta rota, todas estas "tiras" se unen para crear una imagen global y diaria con la que poder monitorizar la atmósfera. El segundo experimento es el MOLA, o altímetro láser del orbitador marciano. La tarea primaria de este aparato es la de construir un preciso mapa topográfico de la superficie con un margen de error de hasta 10 metros, a base de emitir 10 pulsos láser cada segundo, para que dependiendo de la distancia que tarde la señal en emitirse, rebotar y recibirse, calcula la altura de la zona examinada. También sería usado como radiómetro pasivo para calcular la cantidad de calor emitido por la superficie a una longitud de onda específica. El tercero es el TES, o espectrómetro de emisión termal. Este aparato está diseñado para observar grandes áreas de terreno y analizando la radiación infrarroja emitida por la superficie, es capaz de averiguar la composición de la superficie, distinguiendo los diversos minerales q
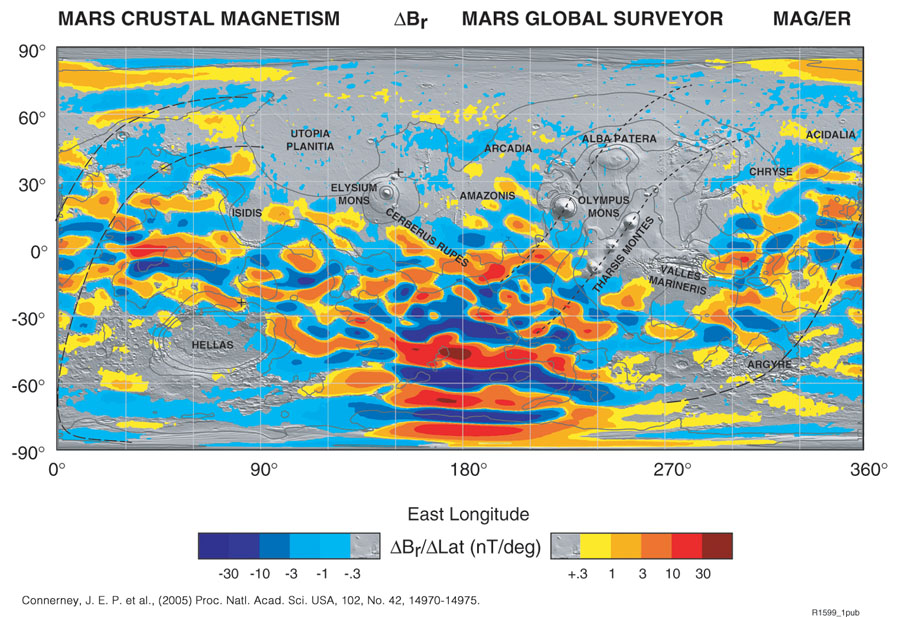
cilindro de la cámara principal se encuentran las otras dos de campo ancho, la roja, para imágenes de contexto, con una resolución máxima de 250 metros, y la azul, para tomas globales, de una resolución máxima de 7'5 km., para monitorizar el planeta y la atmósfera diariamente. Estas dos cámaras comparten la matriz CCD y parte del objetivo. La cámara azul trabaja realizando escaneos, generando "tiras" de imágenes que cada vez que el planeta rota, todas estas "tiras" se unen para crear una imagen global y diaria con la que poder monitorizar la atmósfera. El segundo experimento es el MOLA, o altímetro láser del orbitador marciano. La tarea primaria de este aparato es la de construir un preciso mapa topográfico de la superficie con un margen de error de hasta 10 metros, a base de emitir 10 pulsos láser cada segundo, para que dependiendo de la distancia que tarde la señal en emitirse, rebotar y recibirse, calcula la altura de la zona examinada. También sería usado como radiómetro pasivo para calcular la cantidad de calor emitido por la superficie a una longitud de onda específica. El tercero es el TES, o espectrómetro de emisión termal. Este aparato está diseñado para observar grandes áreas de terreno y analizando la radiación infrarroja emitida por la superficie, es capaz de averiguar la composición de la superficie, distinguiendo los diversos minerales q ue la forman, para así crear un mapa mineralógico global y básico, a la espera de instrumentos más precisos. El cuarto es el MAG/ER, es decir, Magnetómetro/Radiómetro Espectral, encargado de buscar y medir cualquier campo magnético en Marte, así como estudiar la superficie para encontrar remanentes del antiguo campo magnético en el Marte primordial. Los magnetómetros se sitúan en el final de las placas solares, el Radiómetro espectral en la plataforma de instrumentos. Y por último, el sistema de radio ciencia, que mediante el sistema de telecomunicaciones y un oscilador ultraestable instalado en la sonda, construirá un mapa de gravedad del planeta, a base de calcular la desviación Doppler en la señal de comunicación de la sonda. Además, también equipa el Mars Relay System, que es un sistema de recepción UHF para comunicaciones con futuras sondas de superficie, para que a través de ella los vehículos que se envíen al suelo de Marte comuniquen con su centro de control rápidamente. Una vez a plena carga, la Mars Global Surveyor daba un peso en báscula de 1.035 kg.
ue la forman, para así crear un mapa mineralógico global y básico, a la espera de instrumentos más precisos. El cuarto es el MAG/ER, es decir, Magnetómetro/Radiómetro Espectral, encargado de buscar y medir cualquier campo magnético en Marte, así como estudiar la superficie para encontrar remanentes del antiguo campo magnético en el Marte primordial. Los magnetómetros se sitúan en el final de las placas solares, el Radiómetro espectral en la plataforma de instrumentos. Y por último, el sistema de radio ciencia, que mediante el sistema de telecomunicaciones y un oscilador ultraestable instalado en la sonda, construirá un mapa de gravedad del planeta, a base de calcular la desviación Doppler en la señal de comunicación de la sonda. Además, también equipa el Mars Relay System, que es un sistema de recepción UHF para comunicaciones con futuras sondas de superficie, para que a través de ella los vehículos que se envíen al suelo de Marte comuniquen con su centro de control rápidamente. Una vez a plena carga, la Mars Global Surveyor daba un peso en báscula de 1.035 kg. meno vaya reduciendo el apogeo de su órbita. El fenómeno es lento, gradual, pero notablemente económico. Además, para ayudar a la tarea, fueron instalados en el final de los paneles solares unos alerones aerodinámicos, para así maximizar el efecto del rozamiento. Esto solo era una de las partes de una compleja serie de maniobras y el uso de una configuración especial en la situación de los paneles solares. Por eso, con respecto a su antecesora, que pesaba 2.500 kg. a tope de carga, la MGS solo llevaba el combustible suficiente para la entrada en órbita y las correcciones una vez allí.
meno vaya reduciendo el apogeo de su órbita. El fenómeno es lento, gradual, pero notablemente económico. Además, para ayudar a la tarea, fueron instalados en el final de los paneles solares unos alerones aerodinámicos, para así maximizar el efecto del rozamiento. Esto solo era una de las partes de una compleja serie de maniobras y el uso de una configuración especial en la situación de los paneles solares. Por eso, con respecto a su antecesora, que pesaba 2.500 kg. a tope de carga, la MGS solo llevaba el combustible suficiente para la entrada en órbita y las correcciones una vez allí. Situada en la punta de un Delta 2-7925, la MGS fue elevada rumbo a Marte el 7 de diciembre de 1996, eso es, casi un mes antes que su compañera de superficie, la Mars Pathfinder, que llegaría dos meses antes que ella. Una vez colocada en la ruta de transferencia hacia el planeta rojo, al desplegarse, uno de los paneles solares, el izquierdo, había quedado parcialmente desplegado. Había una diferencia entre ambos de 19 grados, a causa de la rotura parcial de la bisagra que la une al cuerpo de la sonda. Fue provocado por el desprendimiento de una pequeña pieza de apenas 5 centímetros montada en el sistema de despliegue de los mismos, quedando atrapado en la bisagra y dañándola. En una misión normal este problema no pasaría de mera anécdota, pero para la Mars Global Surveyor los paneles solares y su correcta alineación eran imprescindibles y vitales para realizar el aerofrenado. Eran precisamente los paneles solares los que soportarían mayor estrés durante las zambullidas atmosféricas, por lo que durante el tiempo de viaje a Marte se intentaron maniobras para poder colocar en su sitio el panel dañado. No resultó, por lo que el resto del viaje estuvieron cruzando los dedos para que no pasara nada.
Situada en la punta de un Delta 2-7925, la MGS fue elevada rumbo a Marte el 7 de diciembre de 1996, eso es, casi un mes antes que su compañera de superficie, la Mars Pathfinder, que llegaría dos meses antes que ella. Una vez colocada en la ruta de transferencia hacia el planeta rojo, al desplegarse, uno de los paneles solares, el izquierdo, había quedado parcialmente desplegado. Había una diferencia entre ambos de 19 grados, a causa de la rotura parcial de la bisagra que la une al cuerpo de la sonda. Fue provocado por el desprendimiento de una pequeña pieza de apenas 5 centímetros montada en el sistema de despliegue de los mismos, quedando atrapado en la bisagra y dañándola. En una misión normal este problema no pasaría de mera anécdota, pero para la Mars Global Surveyor los paneles solares y su correcta alineación eran imprescindibles y vitales para realizar el aerofrenado. Eran precisamente los paneles solares los que soportarían mayor estrés durante las zambullidas atmosféricas, por lo que durante el tiempo de viaje a Marte se intentaron maniobras para poder colocar en su sitio el panel dañado. No resultó, por lo que el resto del viaje estuvieron cruzando los dedos para que no pasara nada. Tras 309 días de crucero interplanetario, el 11 de septiembre de 1997 realizó exitosamente la tarea de entrada en órbita, siendo la primera americana que lo hacía desde la Voyager 2 en agosto de 1976. Adoptó una órbita de 262 x 54.026 km., y cinco días después comenzó la tarea del aerofrenado. A la vez que realizaba los primeros pasos, comenzó a tomar datos científicos e imágenes, confirmando la calidad de las observaciones esperadas. Tras casi un mes de aerofrenado normal un cambio en las condiciones atmosféricas (un aumento de la presión en la atmósfera) provocó un mayor rozamiento, provocando vibraciones peligrosas en el panel dañado. El miedo empezó a cundir en el equipo de la misión, porque si el panel se había roto, era el final de la MGS. El panel se mantenía en su sitio, solo que la bisagra había quedado en mal estado a causa del rozamiento. En principio se elevó la altitud de los pasos por la atmósfera (de 110 a 170 km. de altitud), que redujo la presión sobre el panel dañado, y empezaron a buscar estrategias para salvar la misión. Parte del equipo pensó conservadoramente a causa de que los datos ya eran lo suficientemente espectaculares como para seguir arriesgando una sonda dañada, por lo que sugirieron dejarla en la órbita en la que se encontraba. La otra parte quería arriesgarse, y seguir con el aerofrenado. Sin embargo, la ventana para conseguir la órbita científica deseada había pasado. Durante todo el mes de octubre
Tras 309 días de crucero interplanetario, el 11 de septiembre de 1997 realizó exitosamente la tarea de entrada en órbita, siendo la primera americana que lo hacía desde la Voyager 2 en agosto de 1976. Adoptó una órbita de 262 x 54.026 km., y cinco días después comenzó la tarea del aerofrenado. A la vez que realizaba los primeros pasos, comenzó a tomar datos científicos e imágenes, confirmando la calidad de las observaciones esperadas. Tras casi un mes de aerofrenado normal un cambio en las condiciones atmosféricas (un aumento de la presión en la atmósfera) provocó un mayor rozamiento, provocando vibraciones peligrosas en el panel dañado. El miedo empezó a cundir en el equipo de la misión, porque si el panel se había roto, era el final de la MGS. El panel se mantenía en su sitio, solo que la bisagra había quedado en mal estado a causa del rozamiento. En principio se elevó la altitud de los pasos por la atmósfera (de 110 a 170 km. de altitud), que redujo la presión sobre el panel dañado, y empezaron a buscar estrategias para salvar la misión. Parte del equipo pensó conservadoramente a causa de que los datos ya eran lo suficientemente espectaculares como para seguir arriesgando una sonda dañada, por lo que sugirieron dejarla en la órbita en la que se encontraba. La otra parte quería arriesgarse, y seguir con el aerofrenado. Sin embargo, la ventana para conseguir la órbita científica deseada había pasado. Durante todo el mes de octubre se estudió la capacidad de la sonda para soportar el aerofrenado, y se pudo comprobar que si se practicaba la entrada en la atmósfera a 120 km. de altitud, con el tiempo, en un año, conseguiría una órbita muy similar a la inicialmente prevista. Para ello, el panel dañado debía ofrecer el lado contrario, el que equipaba las células solares, para así proteger la bisagra dañada. Una prueba con un panel de repuesto confirmó que las células solares sobrevivirían a este proceso, y obtuvo la luz verde para comenzar las nuevas maniobras.
se estudió la capacidad de la sonda para soportar el aerofrenado, y se pudo comprobar que si se practicaba la entrada en la atmósfera a 120 km. de altitud, con el tiempo, en un año, conseguiría una órbita muy similar a la inicialmente prevista. Para ello, el panel dañado debía ofrecer el lado contrario, el que equipaba las células solares, para así proteger la bisagra dañada. Una prueba con un panel de repuesto confirmó que las células solares sobrevivirían a este proceso, y obtuvo la luz verde para comenzar las nuevas maniobras. el MOC al Valles Marineris fue capaz de captar en sus pendientes gran cantidad de estratos, evidenciando que la formación de la superficie marciana era similar que la de la Tierra. Otras imágenes proporcionaron visión directa del suelo de un canal marciano, el Nirgal Vallis, contemplando las dunas formadas en su fondo. Y desde luego, observó el Olympus Mons, obteniendo la mejor imagen jamás realizada al monte más alto del sistema solar.
el MOC al Valles Marineris fue capaz de captar en sus pendientes gran cantidad de estratos, evidenciando que la formación de la superficie marciana era similar que la de la Tierra. Otras imágenes proporcionaron visión directa del suelo de un canal marciano, el Nirgal Vallis, contemplando las dunas formadas en su fondo. Y desde luego, observó el Olympus Mons, obteniendo la mejor imagen jamás realizada al monte más alto del sistema solar. manera polar a una altura media de 375 km. sobre el planeta, completaba un giro cada 117 minutos, y Marte rotaba en cada órbita de la sonda unos 28º
manera polar a una altura media de 375 km. sobre el planeta, completaba un giro cada 117 minutos, y Marte rotaba en cada órbita de la sonda unos 28º hacia el oeste. Gracias a esto, la cámara azul del MOC podía realizar imágenes globales para el estudio de la climatología. Su labor principal abarcó todo un año marciano, es decir, 687 días terrestres.
hacia el oeste. Gracias a esto, la cámara azul del MOC podía realizar imágenes globales para el estudio de la climatología. Su labor principal abarcó todo un año marciano, es decir, 687 días terrestres. Cuando se supo que a principios del 2004 dos todoterrenos gemelos, los MER, alcanzarían la superficie marciana, la MGS fue reconfigurada para hallar los mejores lugares. Para el MER-1, o MER-B, se escogió un lugar en Terra Meridiani, mientras que el MER-2, o MER-A, iría a un lugar en las antípodas de Terra Meridiani, hallándolo en el cráter Gusev. Con su escepcional resolución pudo descartar áreas peligrosas para los dos vehículos, mientras que redondeaba su órbita para funcionar como relé de comunicaciones para ellos. Mientras, siguió observando los terrenos del planeta, hallando nuevos cráteres, dunas en movimiento, etc.
Cuando se supo que a principios del 2004 dos todoterrenos gemelos, los MER, alcanzarían la superficie marciana, la MGS fue reconfigurada para hallar los mejores lugares. Para el MER-1, o MER-B, se escogió un lugar en Terra Meridiani, mientras que el MER-2, o MER-A, iría a un lugar en las antípodas de Terra Meridiani, hallándolo en el cráter Gusev. Con su escepcional resolución pudo descartar áreas peligrosas para los dos vehículos, mientras que redondeaba su órbita para funcionar como relé de comunicaciones para ellos. Mientras, siguió observando los terrenos del planeta, hallando nuevos cráteres, dunas en movimiento, etc. olución pudo captar las áreas de aterrizaje de los dos, junto con las huellas producidas por su desplazamiento. En la Tierra, además, se empezaba a planear una reducción de sus actividades. Una nueva sonda, mucho más potente, con objetivos científicos muy similares a ella, estaba casi terminada, y sería la que tomaría el relevo
olución pudo captar las áreas de aterrizaje de los dos, junto con las huellas producidas por su desplazamiento. En la Tierra, además, se empezaba a planear una reducción de sus actividades. Una nueva sonda, mucho más potente, con objetivos científicos muy similares a ella, estaba casi terminada, y sería la que tomaría el relevo cuando alcanzara el planeta. Durante todo este tiempo, sin embargo, la MGS siguió monitorizando diariamente el planeta, contempló la formación, apogeo y fin de una gran tormenta de polvo en el 2001, y otra menor en el 2003.
cuando alcanzara el planeta. Durante todo este tiempo, sin embargo, la MGS siguió monitorizando diariamente el planeta, contempló la formación, apogeo y fin de una gran tormenta de polvo en el 2001, y otra menor en el 2003. estratos por todas partes, corrimientos en los bordes de cráteres que evidenciaban agua bajo la superficie, cráteres nuevos, mostró que otros más antiguos se habían desenterrados, mostró la evolución estacional del casquete polar sur, con cientos de agujeros y depresiones, observó cómo los remolinos de polvo levantaban el talco marciano. En total, de las más de 200.000 imágenes tomadas desde el MOC, aproximadamente el cuarenta por ciento fueron tomadas por la más potente. El MOLA también nos devolvió datos interesantes, sobre todo confirmando que el hemisferio norte era la zona más
estratos por todas partes, corrimientos en los bordes de cráteres que evidenciaban agua bajo la superficie, cráteres nuevos, mostró que otros más antiguos se habían desenterrados, mostró la evolución estacional del casquete polar sur, con cientos de agujeros y depresiones, observó cómo los remolinos de polvo levantaban el talco marciano. En total, de las más de 200.000 imágenes tomadas desde el MOC, aproximadamente el cuarenta por ciento fueron tomadas por la más potente. El MOLA también nos devolvió datos interesantes, sobre todo confirmando que el hemisferio norte era la zona más  plana de todo el sistema solar, como los fondos oceánicos en la Tierra. La Viking Lander 2 mostró que estaba en una llanura casi absoluta. Nadie prestó atención a ese detalle hasta que los datos del altímetro láser lo confirmaron. Otros datos de interés del altímetro en la zona de la dicotomía mostraron la caída en el perfil desde las tierras altas y las planicies del norte. Comparado con los perfiles topográficos de las costas terrestres, se mostraron enormemente similares, aunque según otros datos no había señal visual de ello. El TES hizo cálculos sobre la abundancia de ciertos minerales, determinando que por allá la roca básica es volcánica, y detallando que las rocas que se forman en ambientes húmedos eran más bien pocas. Eso sí, eran datos básicos, y es probable que la cantidad de polvo en superficie nos esté ocultando la verdadera composición superficial de Marte. Y el magnetómetro pudo hallar, desde el principio, que en el planeta hay magnetismo, pero que más parecen los restos de un campo magnético global que otra cosa, hallando regiones magnetizadas por la zona del hemisferio sur planetario.
plana de todo el sistema solar, como los fondos oceánicos en la Tierra. La Viking Lander 2 mostró que estaba en una llanura casi absoluta. Nadie prestó atención a ese detalle hasta que los datos del altímetro láser lo confirmaron. Otros datos de interés del altímetro en la zona de la dicotomía mostraron la caída en el perfil desde las tierras altas y las planicies del norte. Comparado con los perfiles topográficos de las costas terrestres, se mostraron enormemente similares, aunque según otros datos no había señal visual de ello. El TES hizo cálculos sobre la abundancia de ciertos minerales, determinando que por allá la roca básica es volcánica, y detallando que las rocas que se forman en ambientes húmedos eran más bien pocas. Eso sí, eran datos básicos, y es probable que la cantidad de polvo en superficie nos esté ocultando la verdadera composición superficial de Marte. Y el magnetómetro pudo hallar, desde el principio, que en el planeta hay magnetismo, pero que más parecen los restos de un campo magnético global que otra cosa, hallando regiones magnetizadas por la zona del hemisferio sur planetario.
 Tierra-Luna, Júpiter y sus satélites, los satélites marcianos, desde diversas distancias, y lo más sorprendente, sus acompañantes orbitales. En el 2005, cuando estaba acompañada por la Mars Odyssey y la europea Mars Express (llegada a finales del 2003) giró y pudo ver primero a la europea, y posteriormente a la Odyssey, siendo más clara la de la segunda que la de la primera. Pero aún así, son las primeras imágenes de las sondas en su destino, realizadas desde otra sonda. Realmente espléndido.
Tierra-Luna, Júpiter y sus satélites, los satélites marcianos, desde diversas distancias, y lo más sorprendente, sus acompañantes orbitales. En el 2005, cuando estaba acompañada por la Mars Odyssey y la europea Mars Express (llegada a finales del 2003) giró y pudo ver primero a la europea, y posteriormente a la Odyssey, siendo más clara la de la segunda que la de la primera. Pero aún así, son las primeras imágenes de las sondas en su destino, realizadas desde otra sonda. Realmente espléndido.{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}