“Lo mismo te sirve para un roto que para un descosido”. Este viejo
refrán bien podría haberlo rescatado la NASA para utilizarla como filosofía de
una de sus últimas misiones. La protagonista de nuestra historia no solo
cumplió los cometidos que se le encargaron, sino que posteriormente realizó
tareas completamente distintas a las que tenía originalmente programadas, y
encima, de forma exitosa.
Corría el mes de noviembre de 1998,
Stardust estaba a cuatro meses de su lanzamiento, y por esos días,
el programa Discovery preseleccionó cinco propuestas, con objetivos
completamente distintos. Una de ellas, tenía como objetivo Júpiter (
INSIDE Jupiter), otra, Venus (
Vesper), una tercera, a Fobos y Deimos (
Aladdin), la cuarta, a Mercurio (
MESSENGER), y la última, a un cometa.
Como este programa fomenta perfiles de misión novedosos, la cometaria llamaba
la atención. Lo que se buscaba era estrellar un vehículo con la superficie de
uno de estos cuerpos, para tratar de desentrañar lo que ocultan en su interior.
En junio de 1999, se tomó la decisión. De todas, la misión joviana continuó
avanzando para seguir con sus estudios de viabilidad, y de las otras cuatro, se
tomó la decisión de elegir dos: la mercuriana y, sobre todo, la cometaria. Ese
fue el inicio del proyecto
Deep Impact.
Obligados por las características y restricciones del programa
Discovery, los técnicos del proyecto tuvieron que diseñar un vehículo
escasamente cargado de instrumental, para también alojar el proyectil dirigido
destinado a su objetivo. Eso sí, para suplirlo, pidieron, y consiguieron, el
uso de los principales telescopios de la NASA, los colocados en el espacio (
Hubble,
Chandra, el telescopio
SIRTF,
con su lanzamiento programado para el verano del 2003), así como otros situados
en Tierra (los situados en la zona del Pacífico). Con ellos, lo que se buscaba
era detectar el tipo de materiales que se expulsarían del interior del núcleo
cometario tras el impacto. Pero ahí no acababa la cosa: se lanzó una llamada
general tanto a astrónomos profesionales como a aficionados, para unirse a un
programa de divulgación, motivándoles a observar en el momento crucial de la
misión. Realmente eran pocos los medios, pero el objetivo era ambicioso, y a la
vez, irresistible.
La Universidad de Maryland se encargó del proyecto, y se pusieron
manos a la obra para construir una sonda muy avanzada tecnológicamente, a pesar
de sus reducidas dimensiones. Además, aprovecharía los últimos progresos en
materia informática, convirtiéndose en la primera en usar la nueva arquitectura
de ordenador diseñada para vehículos espaciales. Así, la misión estaba formada por dos
vehículos, una sonda de sobrevuelo (
Deep
Impact) y un proyectil dirigido (
Impactor).
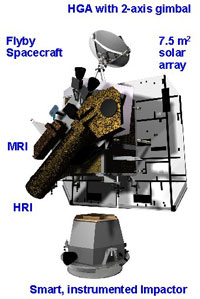
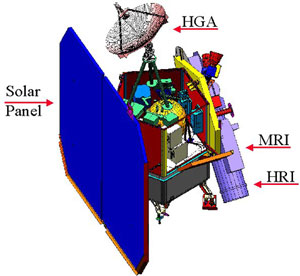
Deep Impact era una sonda elaborada
en aluminio, a base de placas homogéneas y en forma de panal de abeja, para
aligerar peso. Las dimensiones de la sonda eran de 3.3 metros de largo, 1.7 de
ancho y 2.3 de alto, y disponía de un bus de diseño pentagonal, fabricada por
la empresa Ball Aerospace usando una plataforma estándar BCP-2000 altamente
modificada. Sobre esta estructura se fijaron dos estructuras, una de ellas la
plataforma de instrumentación, y la otra la encargada para la generación de
energía. Dentro del bus estaban montados los componentes electrónicos. El
ordenador estaba estructurado alrededor de un nuevo procesador, el RAD750
(basado en los procesadores de los ordenadores comerciales Macintosh), capaz de
trabajar a velocidades de hasta 200 MHz, y disponía de 128 MB de memoria RAM
dinámica, mientras que el almacenamiento corría a cargo de una tarjeta interfaz
de memoria con una capacidad de 512 MB. Estaba estabilizada en sus tres ejes, usando las herramientas
usuales para su orientación (sensores solares, dos
escáneres estelares, un complejo de ruedas de reacción y 2 unidades de medición
inercial). El control termal interno se aseguraba mediante mantas aislantes
multicapa, radiadores y calentadores eléctricos. Las comunicaciones las
gestionaba un pequeño transpondedor de banda-X tipo SDST, unido a una antena parabólica
de alta ganancia, de metro y medio de diámetro, situada encima de una
estructura trípode colocada en la parte superior del bus, y apoyada sobre un
mecanismo direccionable en dos ejes, para así poder apuntarla hacia la Tierra,
mientras que disponía de tres de baja ganancia, dos de banda-X colocadas en la
plataforma de instrumentación, para las fases iniciales de la misión y eventos
de modo seguro, y una tercera en un lateral de la estructura para recibir la
señal del
Impactor, usando un transmisor-receptor
en banda-S.
Deep Impact obtenía la
energía de un panel solar fijo, formado por dos secciones, que una vez
desplegadas, tenían unas dimensiones de 2.8 x 2.8 metros, disponiendo de 7.5
metros cuadrados de superficie activa, y alimentando una pequeña batería de
níquel hidrógeno. En configuración de lanzamiento, las dos secciones del panel
solar estaban apoyadas en la estructura del bus. Cuando se encontraban en su
sitio, protegía la totalidad de la estructura de la sonda de la luz solar,
salvo la antena de alta ganancia, que era el único apéndice que sobresalía.
Para protegerla de las partículas cometarias, se colocaron pequeños escudos
Whipple en las zonas bajas así como en lugares escogidos de la plataforma de
instrumentación y los paneles solares. De la propulsión se encargaban un grupo
de pequeños motores, así como del control de actitud. La mayoría de los sistemas
electrónicos eran redundantes, por lo que si ocurría algún problema no deseado
existía su correspondiente repuesto. La plataforma de instrumentación estaba
situada en el lado opuesto al del panel solar, y estaba colocada de tal manera
que proporcionaba un ángulo de 45º sobre la vertical de la sonda, y alojaba los
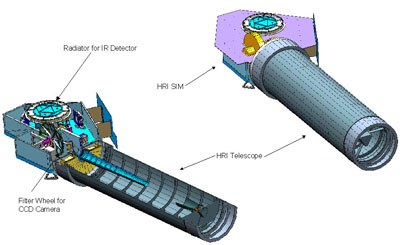
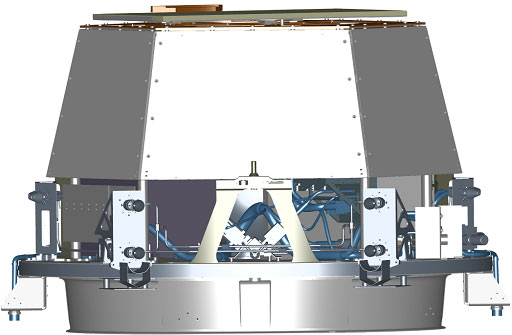
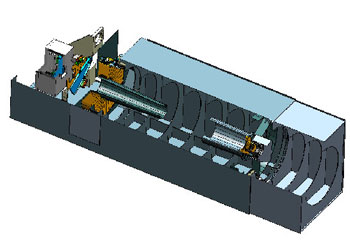
escáneres estelares y los instrumentos científicos. El instrumental estaba formado por
dos elementos. El primero recibía el nombre de HRI, Instrumento de Alta
Resolución. Bajo esta anodina nomenclatura se escondía, posiblemente, la cámara
más potente jamás diseñada para una sonda de exploración del sistema solar. El
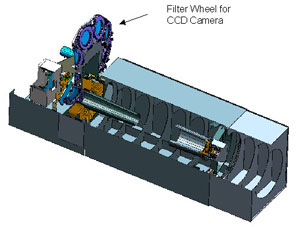
HRI estaba formado por un telescopio tipo Cassegrain que entregaba la luz que
recogía simultáneamente a una potente cámara multiespectral CCD equipada con
una rueda de filtros de 9 posiciones y a un sensible espectrómetro infrarrojo
(un plano focal conteniendo detectores de mercurio, cadmio y telurio,
refrigerados por un radiador pasivo de dos etapas situado encima de los
sensores), todo dentro de una estructura denominada SIM (Módulo de Imágenes
Espectrales). La clave del HRI no estaba en la apertura del telescopio, de 30
centímetros (por los 50 del espejo primario de la HiRISE montada en
Mars Reconnaissance Orbiter), sino en la
enorme distancia focal de que disponía, de 10.5 metros (
f/35). Gracias a esta característica, el HRI ofrecía la
espectacular resolución de 1.4 metros desde una distancia de 700 km. Para que
la HiRISE de
MRO obtenga su fabulosa
sensibilidad la sonda ha tenido que ser colocada en una órbita alrededor de
Marte de unos 300 km. sobre su superficie, por lo que el HRI era indudablemente
más potente. El segundo se denominaba MRI, Instrumento de Media Resolución. Este sistema ofrecía una
arquitectura similar, aunque con inferiores
características. Combinaba un pequeño telescopio Cassegrain de 12 centímetros
de apertura y 2.1 metros de distancia focal (
f/17.5), que entregaba la luz a una cámara monocromática CCD con idéntica
rueda de filtros que la cámara del HRI, aunque con algunos filtros distintos
para adquirir imágenes de la coma del cometa. Disponía de un mayor campo de
visión que la más potente, y resultaba más adecuada para los propósitos de
navegación en los días finales antes del encuentro cometario. A pesar de ser
cinco veces menos potente que el HRI, disponía de la nada despreciable
resolución de 10 metros desde 700 km. de distancia. Por lo tanto, era mucho más
poderosa incluso que la cámara de navegación de la otra sonda cometaria de la
NASA,
Stardust. Una característica
interesante de tanto HRI como de MRI era que para la construcción de ambos
sistemas se siguió un patrón base, empleando grafito para dar forma a los tubos
de ambos telescopios. Por su parte, los espejos de los telescopios se
construyeron en cristal cerámico de Zerodur, recubiertos de aluminio para
propósitos de una máxima recolección de la luz y una lámina de dióxido de
silicio para proteger el recubrimiento. Con su combustible correspondiente,
Deep Impact tenía un peso máximo en
Tierra de 601 kg. Mientras, el
Impactor
era el proyectil dirigido inteligente de la misión. Con unas
dimensiones de un
metro de largo por un metro de diámetro, estaba formado por dos secciones. Por
una parte tenía lo que se llamaba la masa de craterización, que no era más que
peso muerto para ayudar al
Impactor a
producir un agujero sustancial en el núcleo del cometa. Estaba elaborado
principalmente por placas de cobre alrededor de una estructura de aluminio. Se
había elegido el cobre porque no es un mineral que se esperara encontrar en el
cometa, y así poderlo separar fácilmente de manera espectral. La masa de
craterización era exactamente un 49% de la masa total del
Impactor. La segunda sección poseía los elementos electrónicos que
controlarían el breve viaje hacia la superficie del cometa. En esencia,
disponía de ejemplares únicos idénticos a los que equipaba
Deep Impact, tales como ordenador, sistema de orientación (escáner
estelar, unidad de medición inercial, sensor solar), propulsores y
calentadores. La energía provenía de una batería no recargable de 250
amperios-hora. Un emisor-receptor en banda-S permitía enlazar con
Deep Impact usando una antena plana,
para enviarle las imágenes que su único sistema científico recogiera. Este recibía el nombre de ITS, Sensor de Apuntamiento del
Impactor.
Este sistema era en esencia una copia exacta del MRI, con
la única diferencia de que carecía de la rueda de filtros. El
Impactor usaría este sistema para
orientarse en su camino hacia la superficie del cometa y, aunque disponía de la
misma capacidad de resolución que el MRI, era la cámara que nos regalaría las
mejores imágenes del evento, ya que (si sobrevivía al paso por la coma)
observaría detalles del cometa de apenas unos centímetros, calculando que a 20
km. del objetivo podría distinguir estructuras de unas dimensiones mínimas de
20 centímetros. En total, con los 8 kg. de combustible, el
Impactor desplazaba una masa de 372 kg. Los dos vehículos fueron
unidos mediante cables, y se instalaron unos disparadores pirotécnicos unidos a
unos resortes para provocar la separación. Una vez quedaron unidos, en el
momento del lanzamiento declaraban en báscula 973 kg.
Hemos mencionado que el Impactor
era un proyectil inteligente. A decir verdad, los dos vehículos eran
inteligentes. Debido a la distancia entre la Tierra y el cometa en el momento
del impacto, a la necesidad de maniobrar dos sondas independientes, a causa del
retraso en las comunicaciones (aproximadamente 7 minutos), y gracias a la nueva
arquitectura de ordenador, el proyecto Deep
Impact fue la primera misión científica que hizo uso completo del software
AutoNav desarrollado y probado en la sonda ultratecnológica Deep Space 1. La altísima complejidad de
las maniobras que ambos vehículos tendrían que realizar en las cercanías del
objetivo durante las dos últimas horas previas a la colisión del Impactor (y la necesidad de mantener la
filosofía del programa Discovery) motivaron a los ingenieros a implementar este
sistema, sobre todo porque el nuevo procesador, más potente y capaz, sería el
elemento perfecto para alojar semejante herramienta. De esta manera, la tarea
de los navegantes quedaba suprimida, redundando en una reducción de costes
considerable. En esencia, con AutoNav, la gente del proyecto solo podía
sentarse y esperar, dejando a las dos naves manejar su propia navegación. Eso
sí, existían diferencias lógicas entre los dos programas: mientras el alojado
en Deep Impact mantendría su sistema
MRI (y por defecto a HRI) hacia el cometa, el cargado en el Impactor le llevaría directamente a
contactar rudamente con su objetivo. Para ello, Impactor tenía el software completo, mientras que la sonda de
sobrevuelo solo poseía dos de los tres módulos principales, el encargado del
procesado de las imágenes y el dedicado a determinar su localización en el
espacio, cuyos cálculos suministraría al Impactor
para compararlo con su propia información y así dirigirse de una manera óptima
hacia su colisión.
Problemas técnicos (contaminación del conjunto propulsor, construcción
de los ordenadores) y de administración (retrasos en la entrega de varios
componentes) provocaron varios retrasos en el proyecto. Una primera fecha de
lanzamiento se fijó para enero del 2004, para pasar después al 30 de diciembre
de ese año. Un problema encontrado en la segunda fase del lanzador (que obligó
a su sustitución) provocó un nuevo retraso, situándolo el 8 de enero del 2005.
Al fin, el 12, tras nuevos retrasos, un
Delta2-7925 depositó a
Deep Impact en
la trayectoria de escape, camino del cometa. Al poco de desplegar el panel
solar y de adquirir la orientación, entró en modo seguro, y así estuvo durante
un día. Después del susto, y tras un análisis de la telemetría enviada, vieron
un pequeño error en los márgenes de temperatura tolerable en la programación de
protección contra fallos. Tras corregir este error, la sonda volvió a la
normalidad y comenzó a probar sus sistemas de a bordo, en la llamada fase de
comisión, que duraría aproximadamente un mes.
Durante esta fase de pruebas, se puso en marcha el AutoNav para
comprobar su capacidad de apuntar a Deep
Impact autónomamente. Si bien las pruebas fueron satisfactorias, dirigiendo el HRI primero a la Luna,
y posteriormente a
Júpiter, las imágenes entregadas
por el sistema se mostraron de una calidad inferior a la proyectada. Se pensó
que los espejos del telescopio estaban empañados, de manera parecida a como lo
estuvo la de
Stardust. Se realizó el
mismo procedimiento, a base de calentar el instrumento para evaporar las
partículas acumuladas, y si bien la resolución mejoró de manera importante, aún
se encontraban por debajo de lo que el HRI debería entregar. Un equipo de
ingenieros estudió el problema durante los primeros meses de viaje, y llegaron
a la conclusión de que uno de los espejos del telescopio, fabricado para estar
plano, parecía que había desarrollado cierta curvatura durante las pruebas de
ambiente espacial dentro de la cámara de vacío. Este problema no era
subsanable, sin embargo, encontraron una solución: usando una técnica de
procesamiento de imágenes llamada deconvolución, desarrollada para corregir el
defecto en el espejo primario del telescopio
Hubble antes de la misión de reparación, sería posible recuperar
casi toda la resolución proyectada para la cámara. Una vez superada la fase de
comisión, la de crucero dio comienzo.
La primera maniobra de corrección de trayectoria, realizada el 11 de
febrero, fue tan precisa que la
segunda, planeada para marzo, resultó innecesaria.
La siguiente, el 9 de mayo, acercó aún más su trayectoria hacia su objetivo.
Eso sí, a 69 días de la fecha prevista para el encuentro,
Deep Impact detectó por primera vez su destino: el cometa 9P/Tempel 1.
El cometa Tempel 1 es uno de los viejos conocidos entre los astros de
este tipo. Debido a su órbita entre el Sol y Júpiter, es uno de los más fáciles
de seguir, bastante activo, y con un tamaño relativamente mediano (los cálculos
iniciales antes de la misión pronosticaban unas dimensiones de 14 x 4.6 x 4.6
km.) para un objeto de sus características. Se esperaba que tuviera forma
alargada e irregular, y se suponía que estaba compuesto por una mezcla de
silicatos, hielo y compuestos orgánicos. La misión Deep Impact no solo trataría de resolver la duda, sino que nos
daría pistas de cómo se formó y de su estructura interna.
La fase de aproximación comenzó 60 días antes del encuentro (es decir,
el período durante el cual se esperaba que las cámaras de a bordo pudieran
comenzar a enseñarnos el Tempel 1), sin embargo, como ya había sido capaz de
verlo 9 días antes, empezaron a monitorizar al cometa, para estudiar sus movimientos
(para calcular más exactamente su órbita y su rotación), la actividad del
núcleo y densidad de la coma. Ya en el mes de junio, los días 14 y 22 detectó
estallidos potentes de material por parte del núcleo (más potente el segundo,
en el orden de unas seis veces más), evidenciando que es un objeto aún bastante
activo. El 23 de junio, la primera de las maniobras de apuntamiento hacia el Tempel
1 tuvo lugar de manera exitosa, colocando al conjunto en una ventana de impacto
de unos 100 km. de anchura. A 5 días de la fecha fijada para el encuentro,
comenzó la fase final de la misión, la de impacto.
El 29 de junio, configuraron a la sonda para adquirir secuencias del
Tempel 1 de manera más seguida, para conocer su posición en el espacio y su
distancia al cometa para así calcular la distancia y la velocidad de
aproximación. A medida que se acercaba, la actividad del objeto aumentaba, ya
que se encontraba cerca del perihelio de su órbita, facilitando así a la sonda
la tarea de navegación. El 2 de julio, a unas 30 horas del impacto, completó la
maniobra final de apuntamiento, reduciendo la ventana de impacto a una de un
ancho de 15 km. Con esto, estaba casi lista para liberar el
Impactor. A su vez, Tempel 1 volvió a
dar muestras de su actividad con otro estallido de material proveniente de la
superficie de su núcleo. Una forma de saludar al dúo que se aproximaba.
A apenas 24 horas del impacto,
Deep
Impact separó al
Impactor. Para
ello armó el sistema pirotécnico, a la vez que los sistemas de a bordo del
impactador se preparaban para iniciar su funcionamiento. Después de colocarse
en la posición de liberación hacia el cometa, la separación entre los dos
vehículos se hizo efectiva. Los cables de unión detectaron este hecho,
provocando el arranque del ordenador del
Impactor. Una vez orientada, el ITS adquirió su primera imagen del núcleo
del cometa, dos horas después de la separación. Tras esto, 12 minutos después
de la liberación,
Deep Impact
cumplimentó la maniobra principal de desviación, diseñada para alejarle a una
distancia de aproximadamente 500 km. sobre el Tempel 1, manteniendo la vista
puesta sobre él.
A pesar de lo que se puede pensar, el
Impactor no fue quien se dirigió hacia el cometa para colisionar
con él. Realmente, su camino de vuelo fue diseñado para que Tempel 1 fuera el
“agresor”, interceptando su rumbo. A modo de comparación, los científicos del
proyecto afirmaban que este hecho era el equivalente cósmico al impacto de un
mosquito con un
Boeing 767. Para
colocarse de esta manera, este vehículo realizó varias maniobras en un
intervalo de hora y media usando AutoNav, a medida que el ITS adquiría cada vez
mejores secuencias de la aproximación, incrementando automáticamente el ritmo
de realización de instantáneas con el propósito de usarlo para su navegación.
Se esperaba que el polvo de la coma acabara con el ITS bastante antes del
impacto final, pero sin embargo, se mantuvo en funcionamiento y consiguió
enviarnos una última imagen cuando estaba a 3 segundos de colisionar con su
superficie. Finalmente, a las 05:45 a.m. UTC del día 4 de julio, el
Impactor realizó su encuentro fatal con
el Tempel 1, bajo la atentísima mirada de
Deep
Impact, a una velocidad de 10.2 km/s.
Se liberó una cantidad de energía inmensa, el equivalente a detonar
4.5 toneladas de TNT. El destello provocado evitó observar el cráter generado
(uno de los objetivos de la misión), sin embargo, se pudo ver como expulsó hasta
30 millones de kilogramos de material al espacio, una mezcla entre agua y
polvo. Además de
Deep Impact, los
telescopios
Hubble,
Chandra,
Spitzer (anteriormente
SIRTF),
XMM-Newton,
GALEX, Keck…, contemplaron desde la distancia este evento, y a la
fiesta se unió la sonda
Rosetta, el
proyecto cometario de la ESA, con su destino en ese momento a muchos años de
distancia. Los resultados devueltos por toda esta constelación de observadores
remotos nos mostraron que el Tempel 1 es un objeto complejo y extraño,
posteriormente se conjeturó que probablemente se había formado cerca de la
órbita de Urano.
Entre
Deep Impact y el
Impactor, en total se obtuvieron 4.500
imágenes del evento. La sonda de sobrevuelo pasó a unos 500 km. del núcleo
cometario, aunque en ese momento
Deep
Impact estaba orientada ofreciendo sus escudos hacia el cometa, de manera
que no podía ver el Tempel 1. Una vez volvió a dirigir la vista a él, continuó
adquiriendo imágenes durante dos días más. Gracias al observatorio
Swift de la NASA, pudimos ver que el
cometa continuó expulsando material hasta 13 días después, con un pico de
emisión cinco días después de la colisión. El día 21 de julio realizó una
pequeña maniobra de modificación de trayectoria, para colocarla en camino de
regreso hacia la Tierra, en el caso de poder realizar una misión extendida, y a
finales de mes, tras la transmisión de todo lo concerniente al encuentro, la
sonda fue colocada en hibernación.
La misión resultó todo lo
exitosa que se había previsto, incluso más. Se había arañado la superficie de
un cometa, se había visto su material subsuperficial, se había analizado, y no
solo nos devolvió
datos tremendamente valiosos sobre estos cuerpos, sino que
produjo la que se ha convertido en una de las imágenes icónicas de la
exploración espacial: el destello del impacto sobre el Tempel 1. Casi
inmediatamente, comenzaron a surgir las preguntas: ¿es este cometa un
representante del resto de objetos de su tipo? O por el contrario, ¿es un
elemento único, distinto del resto? La verdad es que sabemos tan poco de los
cometas que esas preguntas continúan en el aire. La mejor forma de comprobarlo
sería enviar otro proyectil a otro cometa, pero eso superaba las posibilidades
técnicas de la misión. Por lo tanto, habría que esperar a que
Stardust nos entregara las muestras de
la coma del cometa Wild 2 que recolectó en enero del 2004.
Alrededor de la misión Deep
Impact se concentraron varias curiosidades. Una de las más llamativas fue
que el momento crucial del proyecto coincidía con la celebración del 50
aniversario de que la primera canción de Rock and Roll, Rock Arond the Clock,
de Bill Halley and His Comets, se convirtió en número uno en las listas de
ventas. Aprovechando la coyuntura, los miembros supervivientes del grupo
realizaron un pequeño concierto para el personal del JPL, al día siguiente del
suceso, como punto final de la celebración del éxito del proyecto. Otra
curiosidad que rodeó a Deep Impact es,
cuanto menos, ridícula. Una astróloga rusa, de nombre Marina Bay, denunció a la
NASA, pidiendo nada menos que una indemnización de… ¡300 millones de dólares!,
bajo la afirmación de que el hecho de colisionar con un cometa “había alterado
el equilibrio natural de las fuerzas del Universo”. Por vía de su abogado,
buscó “testigos” para ayudarla en su demanda, declarando que “el impacto cambió
las propiedades magnéticas del cometa, y podría haber afectado a la telefonía
móvil en la Tierra. Si tu teléfono dejó de funcionar esa mañana, pregúntate
¿por qué?, y entonces acude a nosotros”. Un año después, la corte penal en
Moscú falló en contra de la astróloga, a pesar de que apeló la decisión. En
realidad, el Impactor apenas alteró
el perihelio del cometa Tempel 1 en 10 centímetros, y acortó el período de
traslación en menos de un segundo. Y una tercera vino desde la populosa
República Popular China. Mientras los científicos e ingenieros de este populoso
país no podían más que celebrar este rotundo éxito, las autoridades del país
anunciaron la intención de desarrollar una versión “más inteligente” del
concepto, es decir, aterrizar en un cometa o asteroide, y desde allí, empujarlo
fuera de su órbita. Hasta lo que sabemos, desconocemos si esa idea ha pasado de
las mentes pensantes a un proyecto concreto.
A pesar del éxito de la misión, hubo un pequeño lunar: no se había
visto el cráter generado. La gran decepción por este pequeño hecho fue
escuchada por la gente del proyecto Stardust,
cuya sonda terminaría su misión a principios del 2006. Así, a mitad del mes de
julio de ese año, con su sonda ya libre de cualquier cometido, sugirió la
posibilidad de enviarla al Tempel 1, para así finalizar la misión con la
observación del resultado. A la vez, los administradores de Deep Impact estaban planeando la misión
extendida de su sonda. Ésta estaba en hibernación, con revisiones cada seis
meses para comprobar el estado de salud de sus sistemas, a la espera de que la
encargaran nuevos cometidos.
El 3 de julio del 2007 la NASA anunció a la vez la autorización de
misiones extendidas para Stardust y Deep Impact. Por un lado, la primera
iría definitivamente al Tempel 1, con la tarea de finalizar el trabajo iniciado
en julio del 2005, realizando así el encargo NExT; por el otro, la segunda tendría dos labores diferentes a
realizar.
Bajo el nombre de
EPOXI, era
la combinación de dos proyectos, diferentes entre sí. Uno de ellos se llamaba
EPOCh, Observación y Caracterización de Planetas Extrasolares; la otra, DIXI, Investigación
Extendida de
Deep Impact. EPOCh, como
su propio nombre indicaba, consistía en realizar observaciones a estrellas a
las que ya se le conocen acompañantes, es decir, exoplanetas. Lo que se buscaba
era, mediante la técnica de tránsito, recoger información sobre esos cuerpos
para obtener detalles nuevos, y a la vez, buscar nuevos miembros de esos
sistemas extrasolares. Para ello usaría el HRI como herramienta de detección, y
curiosamente, haciendo del defecto del curvado de uno de los espejos una
ventaja. Más convencional era DIXI. El propósito de esta tarea era proporcionar
un punto de comparación entre el Tempel 1 y el nuevo cometa que investigaría,
el 85P/Boethin, que lo sobrevolaría el 5 de diciembre del 2008.
A pesar del comienzo de
EPOXI
en julio del 2007,
Deep Impact no fue
despertada hasta el 26 de septiembre, para comenzar su primera fase de crucero
hacia el nuevo cometa, y el 1 de noviembre realizó una corrección de rumbo.
Tenía previsto realizar un sobrevuelo a la Tierra para modificar su órbita y
colocarse en la trayectoria óptima. Sin embargo, ya bien entrado diciembre, y
cada vez más cercana la asistencia gravitatoria, los astrónomos del proyecto
fueron incapaces de localizar al Boethin. Debido a esto, no se podía calcular
su órbita, por lo que dirigir la sonda hacia allí sería

imposible. Con esto, no
tuvieron más remedio que recurrir al objetivo cometario secundario planificado
para DIXI, el 103P/Hartley 2, a pesar de que para alcanzarlo, necesitaría dos
años más de crucero, pudiendo encontrarse con él en noviembre del 2010. Eso sí,
daba tiempo de sobra para completar EPOCh, y cualquier otra cosa que se les
ocurriera. El sobrevuelo terrestre, realizado el 31 de diciembre, transcurrió
como fue proyectado, y aprovechando este evento, tanto el HRI como el MRI
fueron recalibrados, apuntando a la Luna como fuente de referencia.
En enero del 2008 comenzó la fase de crucero número dos hacia el
Hartley 2, y empezó a prepararse para comenzar EPOCh. Esta campaña de
observaciones extrasolares se dividió en dos segmentos, una que transcurrió de
enero a
marzo, y una segunda, entre mayo y agosto. Entre esas dos fases, tuvo
tiempo de recalibrar un poco más el instrumental, dirigiendo sus instrumentos
hacia la Tierra tres veces (18 de marzo, 29 de mayo y 5 de junio), cuando
Deep Impact se encontraba a unos 50
millones de km. de ella. Esto fue un experimento para tratar de averiguar cómo
podría verse un planeta extrasolar si se tuviera la resolución apropiada,
además de proporcionar información acerca de la luz reflejada tanto por las
nubes como por la vegetación desde la distancia, para así tener una referencia
en el caso de poder detectar lo mismo en un exoplaneta. Fueron vistas
imponentes, durante las cuales pudimos ver incluso un tránsito de la Luna por
delante de la Tierra en la oportunidad de mayo. Además, el espectrómetro
infrarrojo del HRI detectó, desde la distancia, trazas de
hidróxilo en la
superficie lunar, confirmado los datos de uno de los instrumentos montados en
la hindú
Chandrayaan-1.
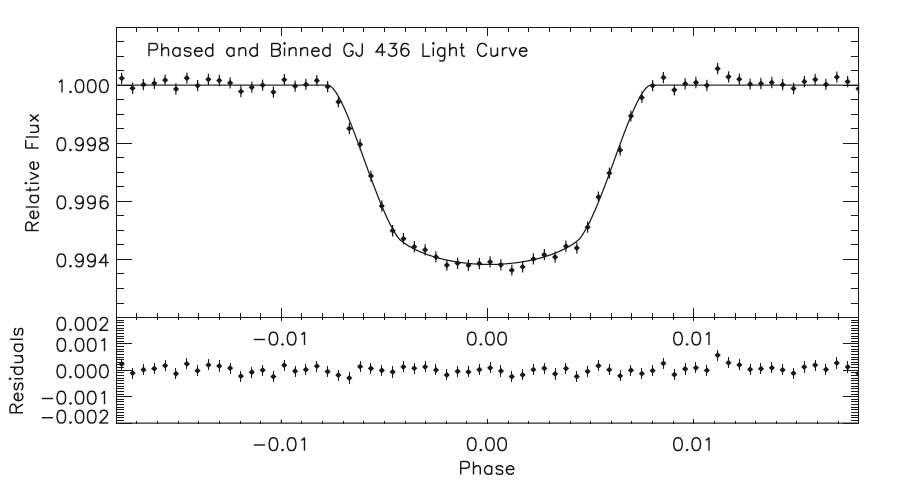
A lo largo de la campaña EPOCh, usó el HRI para realizar observaciones
fotométricas de las estrellas a las que se conocen grandes planetas, para
caracterizar sus propiedades físicas, buscar anillos, satélites, y detectar
nuevos planetas en esas estrellas. Cuando finalizó la tarea, había adquirido
casi 199.000 imágenes del fondo estelar apuntando a las estrellas indicadas. En
total, había observado siete estrellas (XO-2 en la constelación del Lince,
Gliese 436 en la constelación de Leo, BD+36º2593 en la constelación Bootes, GSC
03089-00929 en la constelación de Hércules, Wasp-3 en la constelación Lira, GSC
03549-02811 en la constelación Draco y HAT-P-7 en la constelación Cygnus),
para, mediante la cantidad de luz que el planeta distorsiona, poder averiguar
cosas sobre ellos, tales como su composición atmosférica, además de mejorar las
técnicas para la detección de estos cuerpos. Que sepamos, aún no ha deparado
resultados interesantes, pero este es un proceso largo y difícil.
Tras acabar EPOCh, ya pudo centrar su atención en las maniobras
necesarias para cumplir con DIXI y su encuentro con el Hartley 2. Eso sí,
antes, a mitad de noviembre,
Deep Impact
fue objeto de un test bastante curioso: se le llamó el internet
interplanetario. Realmente lo que se buscaba era probar si se podía montar una
red de comunicaciones de espacio profundo, es decir, que las sondas pudieran
compartir entre ellas información. Para ello,
Deep Impact se utilizó como el único nodo espacial en esta prueba
(los otros 9 estaban simulados en Tierra) y enviaron docenas de imágenes desde
Tierra a la sonda, y viceversa, a una distancia de unos 32 millones de
kilómetros.
A finales del 2008, y posteriormente en junio y diciembre del 2009,
Deep Impact realizó sobrevuelos lejanos
a la Tierra para aprovechar el tirón gravitatorio terrestre para dirigirse
eficientemente a su encuentro con el cometa. El 30 de mayo del 2010, una nueva
maniobra la colocó en el camino de volver a la Tierra, completando un último
sobrevuelo lejano previo al encuentro cometario el 27 de junio. El 5 de
septiembre se dio por finalizada la fase de crucero, iniciando así la fase de
aproximación. Como esta fase era en esencia idéntica a la que le llevó hasta el
Tempel 1, las operaciones serían similares, salvo por el hecho de que no tenía
que soltar ningún impactador. De esta manera, con sus cámaras, la sonda
adquirió la información necesaria para planificar las maniobras necesarias, a
la vez que se estudiaban los movimientos del Hartley 2 por el espacio.
La fase de aproximación resultó ser complicada por dos factores:
primero, debido a la distinta geometría del encuentro que durante la misión
principal, tenía que apuntar sus cámaras al Hartley 2, haciendo imposible
dirigir la antena de alta ganancia hacia la Tierra, porque nuestro planeta se
encontraba en la misma dirección (más o menos) en la que apuntaba a la
instrumentación. Por ello, al comienzo de la aproximación solo podía apuntar
los sistemas científicos al cometa durante seis horas, para después hacer una
rotación sobre su eje solar de 180º para ofrecer la antena de alta ganancia a
las antenas terrestres. Esto se relacionaba con el segundo factor a tener en
cuenta: el calor del Sol. En abril del 2008, durante la tarea EPOCh, se había
descubierto una caída en la señal de comunicaciones de 8 decibelios, una
reducción del 75% con respecto a la de proyecto, lo que significaba que la
capacidad de descarga caía a la mitad. Como en aquellos momentos se encontraba
en su perihelio, y su posición en el espacio provocaba que la luz solar
calentara la plataforma superior de la estructura (donde se montó todo el
equipo de comunicaciones) había que reposicionar la sonda para permitir que
esta sección se enfriara y volviera a operaciones normales. En los primeros
días de la aproximación se corría el riesgo de que este fenómeno volviera a
ocurrir. Para intentar mitigar este efecto el equipo de ingeniería tenía
pensado cambiar del sistema principal al de reserva y viceversa (intercambiando
las antenas de alta y baja ganancia en cada inversión) cada vez que cambiaba la
actitud de la sonda para tener comunicaciones continuas. Como el fabricante del
hardware advirtió, eso provocaría un estrés adicional al aparato, provocando su
avería. Con esa advertencia decidieron usar una estrategia distinta. En
esencia, se dejaría caer la señal de comunicaciones, manteniendo la antena
principal conectada a los elementos primarios, mientras la sonda estaba en
actitud de seguimiento cometario. A este modo se le llamó “antena sin
ganancia”. Además, para proteger el sistema de comunicaciones, se configuró el software de protección contra
fallos para desactivar el HRI si la temperatura subía de 53º C, hecho que si
sucedió, y el sistema más potente no fue reactivado hasta el día 20 de
septiembre.
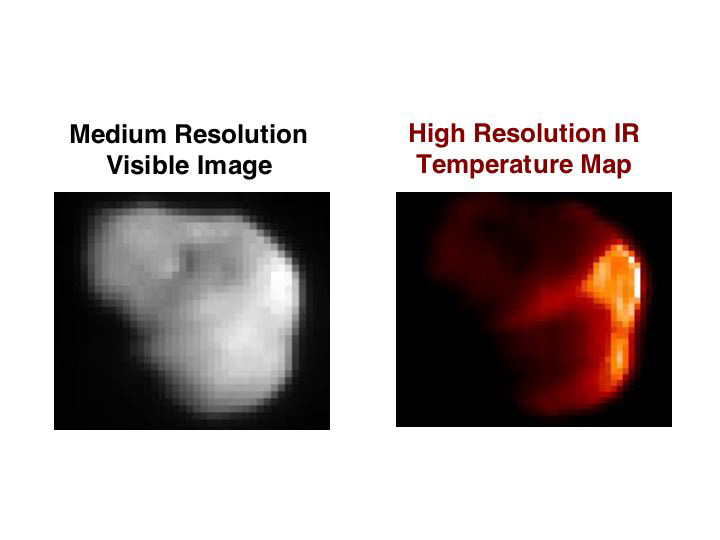
A medida que se iba acercando, pudo contemplar frecuentes estallidos
provenientes del núcleo del cometa.
Se calculaba que el Hartley 2 tuviera un
tamaño mucho menor que el Tempel 1 (apenas unos dos kilómetros de largo), sin
embargo, mostraba una violenta actividad aún desde la lejanía. También desde la
Tierra se pudo observar este pequeño cuerpo, que realizó su máximo acercamiento
a nuestro planeta el 20 de octubre, a 17.7 millones de kilómetros, el más
cercano desde su descubrimiento. Una vez pasados los problemas de
sobrecalentamiento, fue posible activar el espectrómetro infrarrojo de HRI, por
lo que la información recogida por la sonda se enriqueció
El momento crucial del sobrevuelo se fijó para el 4 de noviembre,
esperando pasar a unos 700 km. del Hartley 2. Como cada día que pasaba
Deep Impact se aproximaba

más, el equipo
de navegación demandó una cadencia mayor en la toma y envío de imágenes de
navegación para computar las correcciones necesarias para alcanzar el punto
deseado. Por su parte, el equipo científico quería una monitorización continua
de la actividad cometaria. Para acomodarse a los requerimientos, el equipo de
vuelo ideó una secuencia jocosamente llamada do-si-do, en referencia a un paso
de danza. Para ello, cada hora la sonda rotaba de apuntamiento cometario a
actitud de retransmisión de manera que tras casi una hora de obtener datos del
cometa, se desplazaba para apuntar su antena principal a la Tierra y enviar
toda la información posible, regresando a actitud de adquisición científica
durante otra hora, y así durante varios días, siete horas al día, dejando el
tiempo restante para recolectar toda la información posible. Con las imágenes
de navegación en Tierra, se pudo planificar una maniobra correctora final pocos
días antes del encuentro final. La llamada fase de encuentro comenzó el 3 de
noviembre, a 18 horas del momento crucial, se activaría AutoNav 50 minutos
antes de la máxima aproximación, y se extendería otras 18 horas tras el máximo
acercamiento.
A 21 millones de km. de la Tierra, AutoNav llevó a
Deep Impact a sobrevolar el Hartley 2 a
unos 694 km. de su núcleo el 4 de noviembre del 2010, y a diferencia con el
encuentro con el Tempel 1, esta vez no utilizó su protección cometaria porque
el propósito era mantener las cámaras apuntadas continuamente hacia el núcleo,
arriesgándose con ello a sufrir daños a causa de las partículas cometarias,
aunque por suerte no fue el caso. Cuando las primeras imágenes del encuentro
llegaron al centro de control, los científicos no pudieron hacer otra cosa más
que abrir la boca: el Hartley 2 ofrecía enormes chorros de materia por casi
toda su superficie, y no solo eso, sino que también pudo ver extensas nubes de
material en los alrededores del cometa, expulsadas del núcleo a alta velocidad.
Deep Impact se había vuelo a superar.
Tras este encuentro impresionante, la sonda continuó observando al
Hartley 2 durante aproximadamente 21 días más después de abandonarlo. Eso sí,
la gente de la misión siguió sorprendiéndose de las impactantes tomas que nos
enviaba: trozos, más que partículas, salían disparados de la superficie. Se
contabilizaron hasta 15 chorros individuales de materia a alta velocidad, y
gracias a los datos de los instrumentos, se vio que principalmente estaba
formado por hielo seco. En general, este pequeño cuerpo del sistema solar, de
la forma de un cacahuete, había sorprendido a todos, y
Deep Impact consiguió las, hasta la fecha, mejores imágenes de un
núcleo cometario, lo suficientemente precisas como para poder enlazar por
primera vez los chorros de material y gases con características específicas de
la superficie. Extraordinario. De esta manera, el Hartley 2 se convirtió en el
quinto cometa al que se le pudieron realizar fotografías detalladas para su
estudio.
En principio, con el sobrevuelo completado,
EPOXI tendría que haber acabado, sin embargo, continuó funcionando
allí arriba. Pocas semanas después del encuentro cometario, a alguien se le ocurrió
usar el MRI para observaciones del cielo profundo, como un test. Esta
oportunidad nos proporcionó bellas imágenes de galaxias como M51 o
NGC6960. Un
año después del sobrevuelo al Hartley 2,
Deep
Impact encendió una vez más los propulsores para una nueva corrección de
rumbo, y volvió a hacerlo en octubre del 2012. ¿Y a donde puso rumbo? Debido a
la escasa cantidad de combustible disponible, resultaba imposible que alcanzara
otro cometa, por lo que la gente decidió realizar un estudio para ver qué objeto
sería capaz de alcanzar con los recursos disponibles. La conclusión fue que
podría pasar por las cercanías de un asteroide, el (163249) 2002GT, aunque eso
sí, este evento no sucedería hasta el 4 de enero del 2020. Iba a ser un bonus
muy interesante porque este objeto NEO de menos de 1 km. de diámetro puede ser
potencialmente peligroso. Con tanto tiempo disponible hasta alcanzarlo, se
decidió usar la sonda como observatorio remoto, y entre los meses de febrero y
abril del 2012 observó el cometa no periódico C/2009 P1 (Garradd) desde 1.4
unidades astronómicas, consiguiendo calcular el tiempo de rotación del núcleo,
determinar la abundancia relativa de gases en su coma y el ratio de hielo de
agua a hielo seco, siendo más alto después de su perihelio que antes.
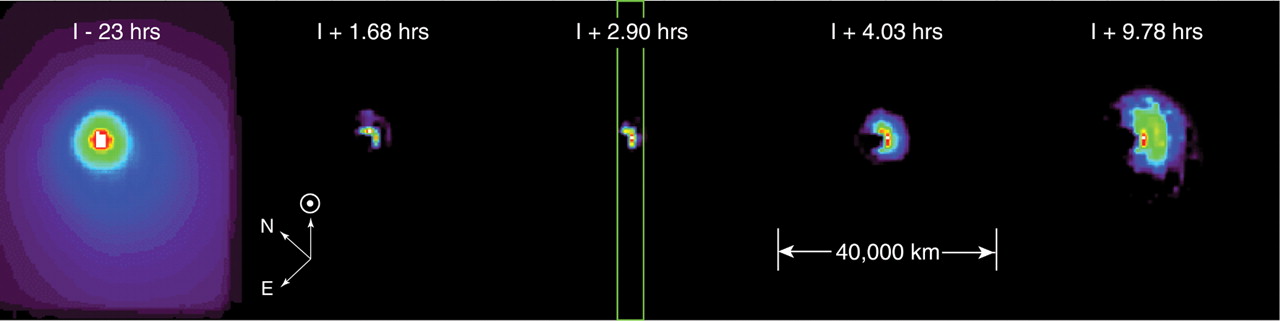
Posteriormente, entre enero y marzo del 2013 se convirtió en el primer observatorio espacial en

estudiar el prometedor cometa C/2012 S1 (
ISON) cuando
éste se encontraba todavía más allá de la órbita de Júpiter.
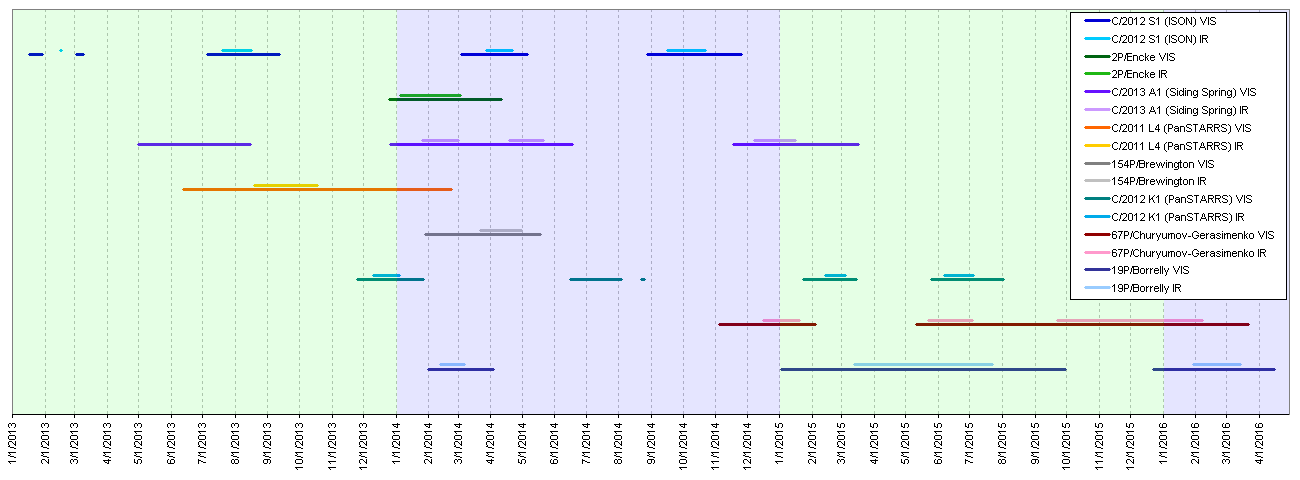
El
programa de observación de cometas hasta su encuentro muy cercano
con el asteroide 2002 GT estaba bastante relleno, con ocho hasta el 2016, y
entre los célebres, además de ISON, estaba el 2P/Encke, el
67P/Churyumov-Gerasimenko (el destino de
Rosetta)
y 19P/Borrely, aquel fantástico fin de fiesta de la misión
Deep Space 1. Siendo ya julio del mismo 2013,
Deep Impact regresó a la observación de ISON. Para aliviar carga a
la Red de Espacio Profundo, se contactaba con la sonda de manera regular una
vez a la semana, y la última comunicación recibida se hizo el 8 de agosto. La
semana siguiente, el 15, fue imposible contactar con la sonda. Analizando el
problema llegaron a revisar cada aspecto del diseño, y finalmente descubrieron
un error potencialmente desastroso: en el código de software había una
instrucción mal escrita que, si se ejecutaba, provocaba que la sonda fuera
incapaz de contar el tiempo. Si esta capacidad,
Deep Impact no podía ejecutar comandos por sí misma, de manera que
se situó en modo de emergencia en algún momento entre el 11 y el 14. Esto
provocó una rotación para intentar mantener apuntado el panel solar a Helios,
pero sin capacidad de ejecutar comandos, sería incapaz de mantenerlo orientado
hacia nuestra estrella, de manera que la presión del viento solar empujó la
sonda fuera de la actitud necesaria, perdió energía, y cuando la batería se
agotó, sucumbió al ambiente espacial. A pesar de intentar contactar hasta el 16
de septiembre, la NASA declaró el 19 a
Deep
Impact como perdida. Un triste final para una extraordinaria misión
cometaria.
¿Y qué fue de la misión
NExT
de
Stardust? Pues el encuentro fue
todo lo exitoso que se esperaba, terminando así la tarea iniciada por
Deep Impact, algo ya bien conocido en
esta
Crónica.
Como bien ha quedado claro en la vida, obra y milagros de esta sonda,
con medios modestos, mucha imaginación y grandes avances tecnológicos, se han
podido hacer tareas destinadas a vehículos mucho más grandes, pesados y
difíciles de manejar. Gracias a Deep
Impact, bien podemos decir que conocemos quizás mejor que nunca esos
cuerpos diminutos pero espectaculares llamados cometas. Y desde aquí la
saludaremos siempre como una de las gigantes de la exploración espacial. No
puede ser de otro modo.
Corazón valiente Deep Impact.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}