De entre los fósiles que existen en el sistema solar que nos pueden
proporcionar pistas sobre la creación de los planetas terrestres, posiblemente
los asteroides son los que podrían decirnos más. Además de los cometas, varios
satélites de planetas exteriores, e incluso el Sol, estos cuerpos celestes,
debido a que han permanecido inalterados desde los tiempos primitivos, son los
más prometedores. Sin duda, los datos que las sondas espaciales puedan
proporcionar de ellos resultan muy valiosos para los científicos, pero es muy
distinto observar muestras con instrumentos remotos montados en vehículos
costosos y complejos, que hacerlo tú mismo usando un simple microscopio. De
ahí, que la NASA tenga a punto una misión con el encargo principal de recoger
un pedazo de asteroide para su posterior análisis en los laboratorios de todo
el mundo.

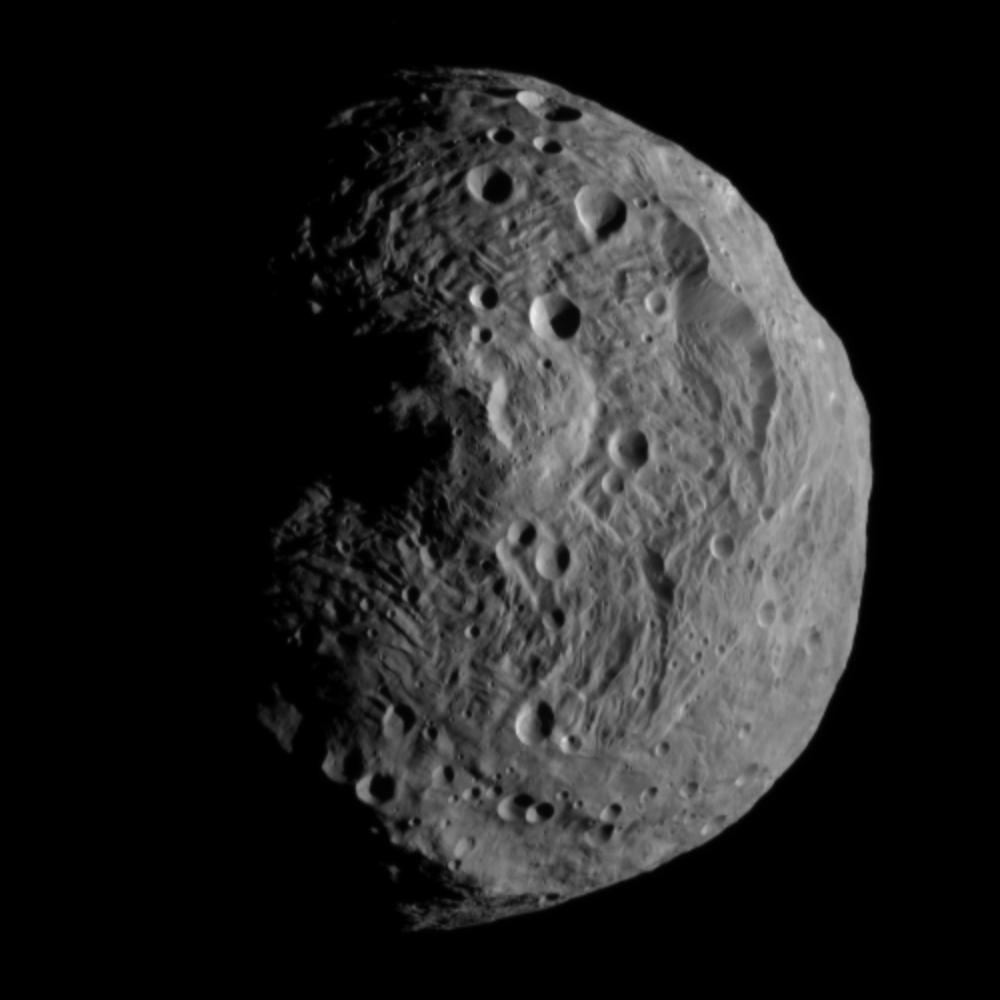
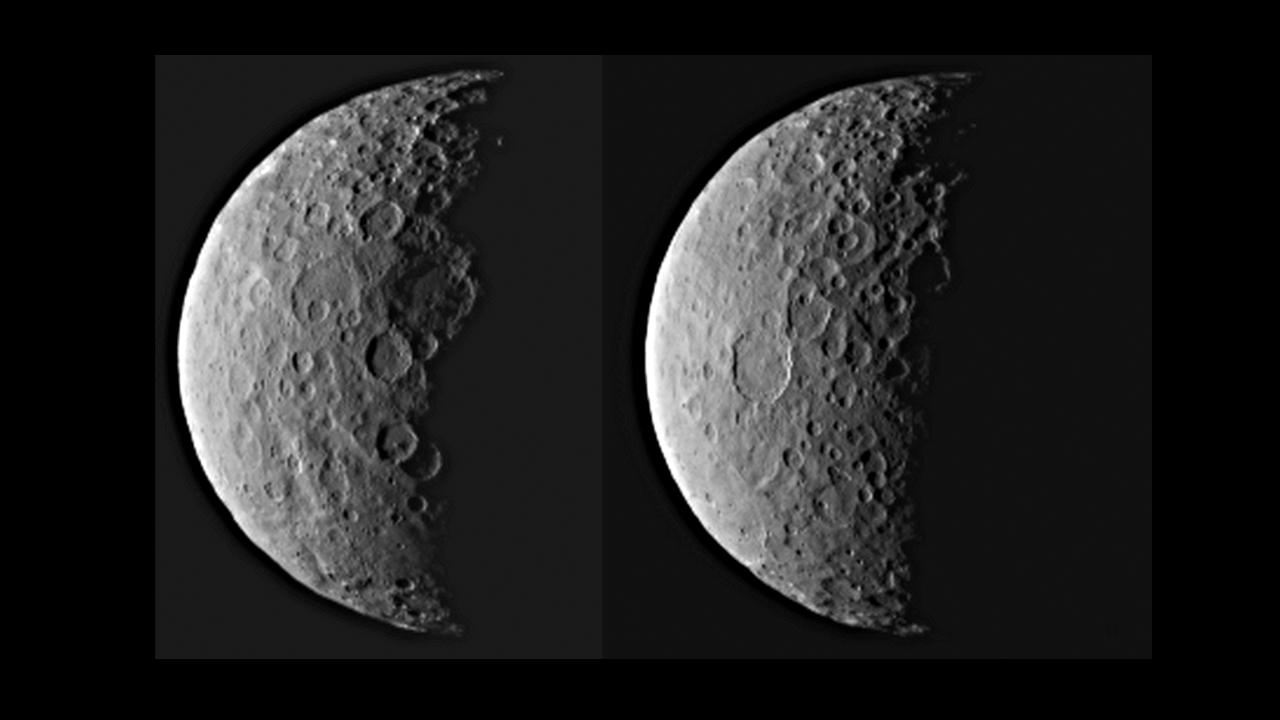
Desde que empezamos por fin a estudiar los asteroides con los ojos de
los artefactos espaciales, hemos visitado hasta 12 objetos de este tipo.
Fragmentos diminutos como Itokawa, enormes rocas como Ceres, todos nos han
resultado ciertamente interesantes, y han contribuido a conseguir más o menos
una cierta cronología de cómo se formó el sistema solar. Hasta la fecha, solo
ha habido tres misiones cuyo objetivo principal eran estos cuerpos:
NEAR-
Shoemaker
a Eros,
Hayabusa a
Itokawa, y
Dawn a
Vesta y
Ceres. Solo la japonesa
tenía el cometido principal de coger polvo de la superficie de su destino para
su posterior retorno a la Tierra, algo conseguido en junio del 2011. Ahora, bajo
el paraguas del programa New Frontiers, la NASA ha preparado una misión de
filosofía idéntica a
Hayabusa, un
tanto más compleja, para en esencia responder las mismas preguntas.

Elegida en el verano del año 2011, se podría decir que OSIRIS-REx es una misión que ha tenido
largo recorrido. El primer concepto apareció en el año 2004 para su entrega al
programa Discovery, y llegó a la final en la que fue elegida la misión lunar GRAIL. Después que la NASA indicara una
misión de recogida de muestras asteroidal como prioritaria, la formulación de
la misión para su aceptación para el programa New Frontiers comenzó en el 2009
para su posterior entrega, y final selección. Como misión del programa New
Frontiers, OSIRIS-REx dispone de
abundante presupuesto para solucionar las complejidades técnicas provocadas por
el perfil de misión, sin embargo, también en ella se ha fomentado el ahorro de
costes, a base de usar tanto hardware como software completamente probados en
el espacio, utilizando elementos que son herencia de tres proyectos distintos.
El objetivo de
OSIRIS-REx (acrónimo
de Explorador de Orígenes, Interpretación Espectral, Identificación de
Recursos, Seguridad y Regolito) es el de viajar a un asteroide de la familia de
los NEO’s, los asteroides cercanos a la Tierra (es decir, de la misma familia
que Eros), principalmente porque su acceso es sencillo, reduce los riesgos de
la misión y podría darnos los primeros detalles de los recursos que pueden
existir en buena parte de estos trozos de roca que orbitan en torno al Sol. Una
vez en torno a su destino, lo estudiará con sus aparatos de a bordo para tratar
de averiguar qué materiales lo conforman, cómo se formó, sus movimientos en el
espacio, y el posible peligro que pueda suponer para la Tierra. En esencia
estos son los objetivos de esta misión, la segunda de espacio profundo
administrada y dirigida por el Laboratorio Lunar y Planetario de la Universidad
de Arizona, después de la exitosa marciana
Phoenix.

OSIRIS-REx es la cuarta
sonda de la familia de vehículos espaciales estrenada por la marciana Mars Reconnaissance Orbiter. Debido a
esto, muchos de los componentes de la sonda son basados en el veterano
orbitador lanzado en el 2005. La estructura está elaborada en aluminio y
compuestos de grafito, poseyendo un gran cilindro central como soporte
primario, del que nacen los soportes verticales en forma de X, soportando dos
plataformas, en este caso la superior para el propulsor principal y la inferior
para el equipamiento científico. La estructura resulta más ancha que en MRO o MAVEN, resultando en un rectángulo de 2.4 x 2.4 x 3.2 metros. El
ordenador de a bordo se estructura en torno al ya tradicional procesador
RAD750, con una memoria RAM de 256 MB, más el almacenamiento para los datos de
los instrumentos. Está estabilizada en sus tres ejes, usando los elementos de
costumbre, es decir, dos unidades

de medición inercial, dos escáneres estelares
y un grupo de sensores solares digitales. La energía proviene de dos grandes
paneles solares que, una vez desplegados, proporcionan una envergadura de 6.2 metros, totalizando una superficie activa
de 8.5 metros cuadrados, alimentando los sistemas de a bordo y almacenándola en dos baterías de ión litio. Las
comunicaciones se gestionan a través de un transpondedor de banda-X, conectado
a una antena de alta ganancia de 2 metros de diámetro (situada en el lateral de
la sonda que soporta los dos paneles solares), una antena de media ganancia
colocada al lado del propulsor principal, y dos de baja ganancia acopladas en
las plataformas superior e inferior. La propulsión es química, equipando tres
grupos. El más potente es el sistema principal, formado por cuatro propulsores
derivados de los usados por MAVEN,
con la misión de colocar en órbita la sonda en torno a su destino y
posteriormente sacarla de allí. Dispone de uno intermedio para las maniobras de
corrección de rumbo, mientras que el menos potente controla la actitud del
vehículo. Un tanque de combustible, situado dentro del núcleo central de la
estructura, tiene capacidad para almacenar 1.700 kg. El control de la
temperatura usa los elementos de costumbre: radiadores, mantas multicapa y
calentadores eléctricos. En total, son seis los experimentos científicos,
desarrollados a partir de la experiencia ganada con NEAR-Shoemaker. OCAMS, Juego
de Cámaras de OSIRIS-REx, conjuga
tres tipos distintos de objetivos, cada uno con su propio uso.

POLYCAM es un
telescopio reflector Ritchey-Chretien de 20.3 centímetros de apertura y una longitud focal de
63.5 cm. (f/3.15) que será la cámara principal durante toda la misión. Está preparada
para la adquisición de imágenes de largo alcance, apropiadas para gestionar la
navegación de la sonda, y en especial para la fase de aproximación a su
objetivo. Una vez en torno al asteroide, servirá como cámara de campo ancho
para tomar secuencias del objeto entero en alta resolución (1 metro). Además
incorpora un dispositivo de enfoque (empleando un elemento óptico móvil frente al detector) que transforma el telescopio en microscopio,
que permite observar pequeños objetos en primer plano. MAPCAM ha sido diseñada
para realizar, como su nombre indica, los mapas del asteroide en media
resolución y cuatro colores (azul, verde, rojo e infrarrojo cercano) empleando un telescopio

refractor de cinco elementos, con una longitud focal de 125 mm. (
f/3.3) y una rueda de filtros de igual número de posiciones, además de caracterizar las
regiones candidatas para la recolección de muestras.
SAMCAM es un objetivo milimétrico
con el encargo de realizar primeros planos durante la adquisición de muestras
con una cadencia casi idéntica a la de una cámara de vídeo, y para caracterizar
el regolito y las rocas que puedan existir en la superficie. también será usado para tomar imágenes de campo ancho del asteroide, generando mapas de baja resolución. Dispone de un sistema refractor con una longitud focal de 28 mm. (
f/5.5), y posee una rueda de
filtros de tres posiciones con filtros idénticos, de manera que si uno acaba
bloqueado por el regolito, se cambia al siguiente, mientras que la cuarta posición está ocupada por un elemento óptico que cambia el enfoque, lo que le permitirá examinar la cabeza de muestras antes de ser almacenada. las tres cámaras emplean sensores idénticos tipo CCD, de 1024 x 1024 pixels. OLA, Altímetro Láser de
OSIRIS-REx, se basa en instrumentos
similares montados en sondas como
NEAR-
Shoemaker,
Mars Global Surveyor,
MESSENGER
o
Lunar Reconnaissance Orbiter. Es un
instrumento tipo LIDAR y tiene la misión de realizar

un completo mapa
topográfico del asteroide, a la vez que será usado para caracterizar las zonas
candidatas para el muestreo. Además, posee un aparato que apunta el emisor
láser a distintos puntos de la superficie asteroidal sin necesidad de cambiar
la actitud de la sonda, permitiendo la construcción de imágenes en 3D del área
escaneada. Durante la fase de aproximación, servirá como medidor de distancia
entre la sonda y el asteroide para saber la posición exacta con respecto a su
destino. Lo novedoso es que dispone de dos transmisores láser, uno de alta energía para distancias superiores a un kilómetro, y uno de baja energía para distancias inferiores al kilómetro y medio. OVIRS, Espectrómetro de Visible e Infrarrojo de OSIRIS-REx, es un versátil instrumento (derivado del canal LEISA
del sistema Ralph a bordo de la sonda
New Horizons) que tiene el encargo de
realizar un mapa global de minerales y elementos orgánicos con una resolución
aproximada de 20 metros entre una longitud de onda de entre 0.4 a 4.3 micrones en el infrarrojo cercano, a la vez que recolecta información mineralógica de las
zonas candidatas para la recolección de

muestras (resolución menor a 2 metros).
Para ello dispone de un sensor de 512 x 512 píxels, y sobre él los distintos
filtros espectrales en configuración lineal variable, es decir, una lámina del
mismo tamaño que el sensor pero con los filtros situados en columna, al estilo
del sensor infrarrojo THEMIS de
Mars
Odyssey.
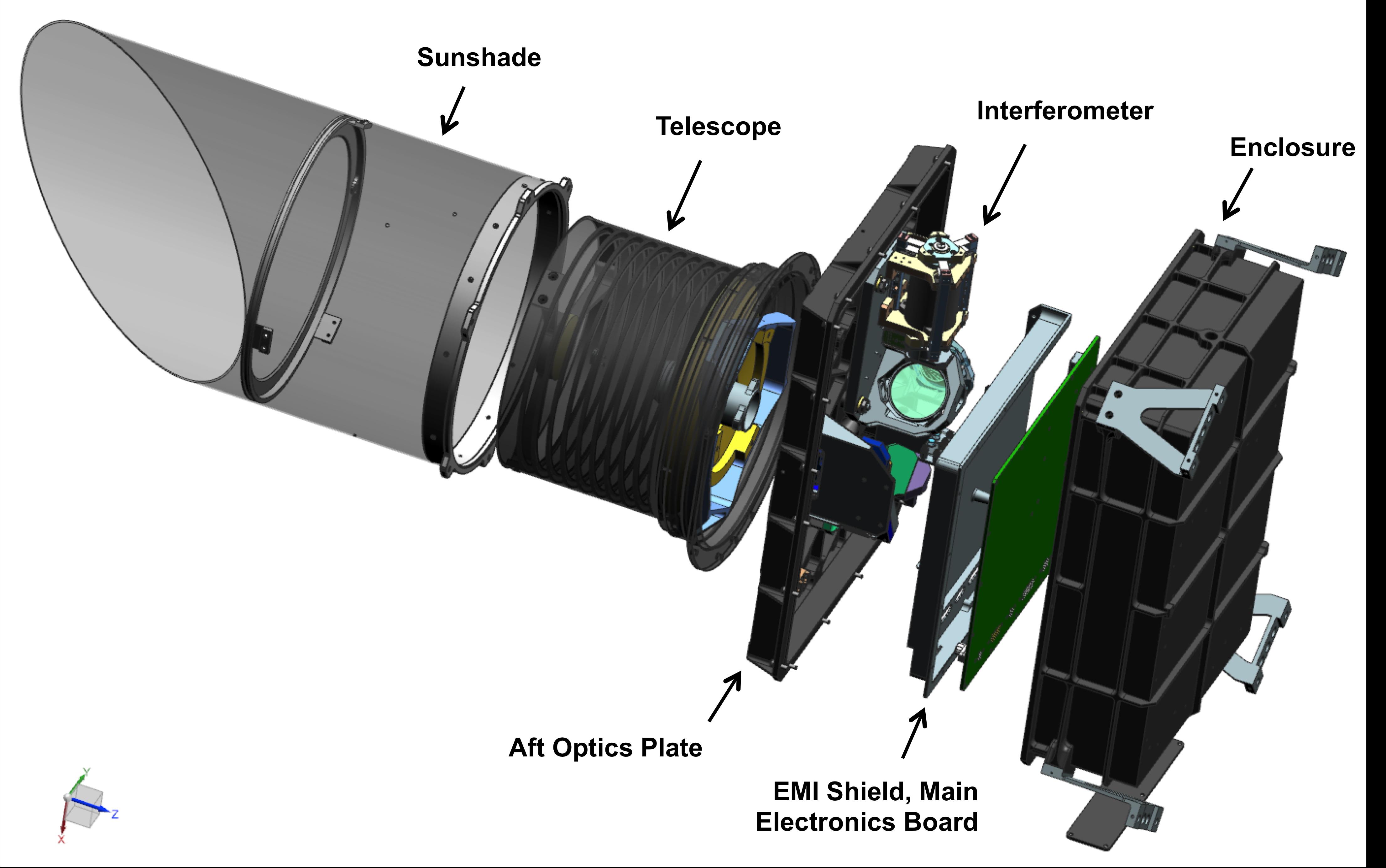
OTES, Espectrómetro de Emisión Termal de
OSIRIS-REx, es un aparato que trabaja allí donde OVIRS no puede,
para completar la cartografía global mineralógica del objetivo (resolución, 40
metros) entre los 5 y los 50 micrones, mientras detecta la emisión termal de la superficie, y caracteriza, al
igual que los otros instrumentos, las zonas candidatas para la recolección de
muestras (resolución, 4 metros). Este sistema utiliza componentes ya bien
probados en misiones anteriores, siendo el sensor una réplica del Mini-TES que

portaron los rover marcianos
Spirit y
Opportunity, mientras que la óptica
es idéntica a la fabricada para los TES de las
Mars Observer y
Mars Global
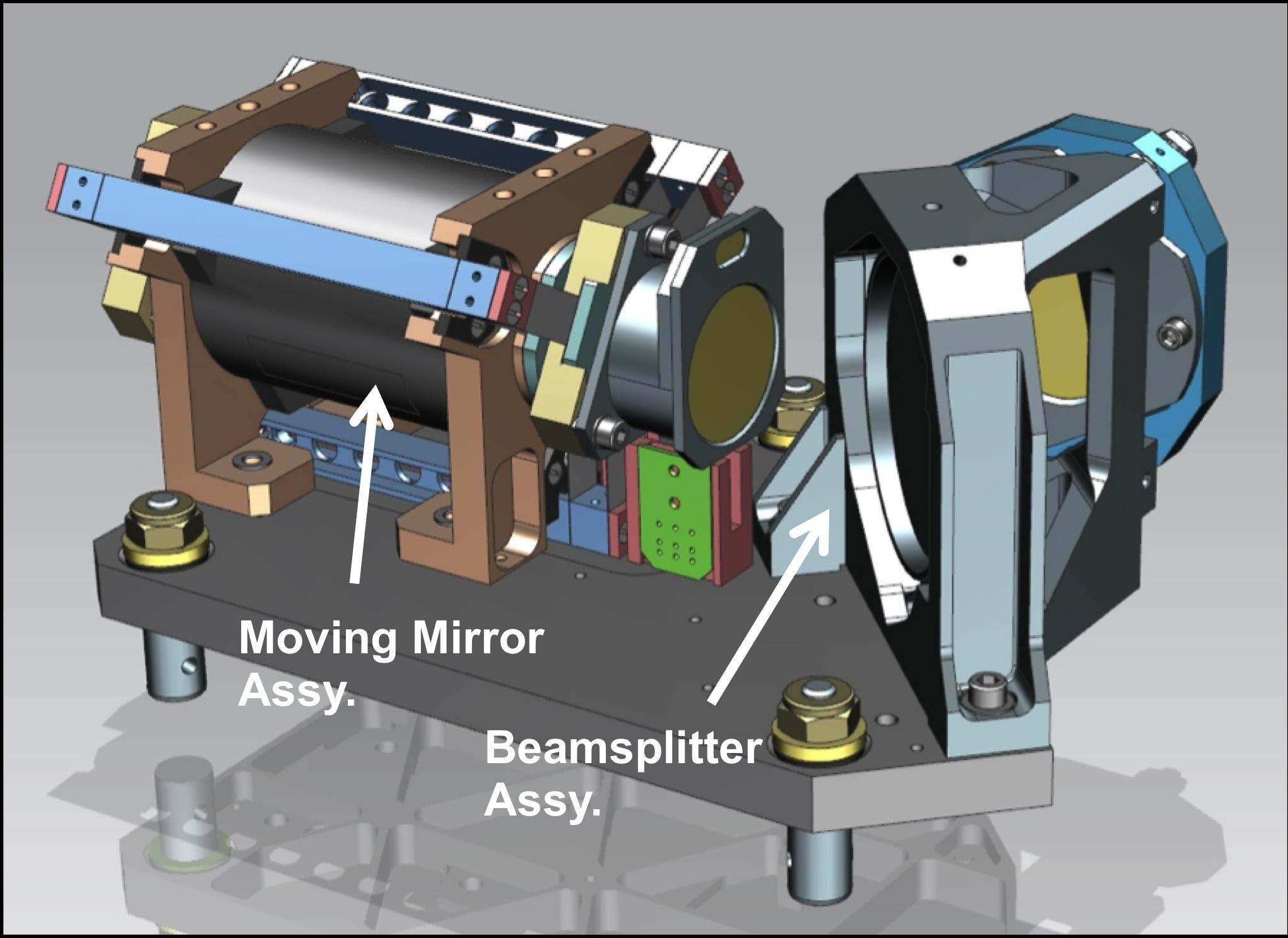
Surveyor. Se trata de un espectrómetro de transformación Fourier sumamente
compacto centrado en un
interferómetro tipo Michelson y acabado en un conjunto
sensor no refrigerado. Sirviendo al sistema dispone de un telescopio tipo
Ritchey-Chretien f/3.91 con una
apertura de 15.2 cm., y respecto a los sistemas de los que deriva, la única
diferencia es el divisor de haz. Mientras el usado en los MER estaba fabricado
en bromuro de potasio, OTES dispone de uno elaborado en diamante depositado por
vapor químico. El sistema de telecomunicaciones de la sonda se podrá usar para
determinar la distribución de masas, la gravedad y los movimientos concretos
del asteroide. Y como último añadido, REXIS, Espectrómetro de Imágenes de Rayos
X para el Regolito, es un aparato en dos partes: el propio espectrómetro y el
Monitor

de rayos X Solares (SXM). El espectrómetro está formado por dos partes
principales, la máscara de apertura codificada (como las que se usan en varios
observatorios espaciales) elaborada a base de acero inoxidable de 100 micrones
de grosor, y un conjunto de cuatro sensores CCD (idénticos a los usados en el
sistema XIS del observatorio japonés
Suzaku),
refrigerados a -60º C, y protegidos de otras radiaciones con un filtro de
bloqueo óptico, una capa de 220 nm de aluminio, con una separación, o longitud
focal, de 20 cm. Todo el aparato está protegido del bombardeo de partículas que
puedan penetrar por la apertura mediante una tapa de aluminio. Por su parte, el
SXM, situado junto a la antena de alta ganancia, observará continuamente al Sol
para informar al espectrómetro de cuántos rayos X agreden el asteroide,
empleando un sensor de deriva de silicio, protegido de la luz solar directa por
una pequeña ventana de berilio. Se encargará de realizar mapas químicos
globales (4.3 metros desde 700 metros) y locales del asteroide a base de
detectar la energía de los rayos X emitida o reflejada por los elementos que
forman la superficie, pudiendo detectar magnesio, hierro, azufre o silicio.
Este aparato tiene la particularidad de ser un proyecto realizado por
estudiantes universitarios, convirtiéndose en el segundo de su tipo en volar en
una sonda espacial, tras el VBSDC montado en
New Horizons. La recolección de muestras será el propósito de
TAGSAM, Mecanismo de Adquisición de Muestras de Contacto y Separación. Se basa
en parte en el sistema elaborado para la cometaria
Stardust, y dispone de cuatro elementos: un brazo
articulado de 3.2
metros, la cabeza de muestras, un suministro de gas de nitrógeno, y la cápsula
de retorno de muestras. El brazo dispone de dos secciones de 1.6 metros,
recogidas en el lateral opuesto al de la antena principal, y en el final tiene
colocada la cabeza de muestras, un pequeño disco (que estará dentro de una
pequeña caja durante el viaje de crucero hacia el asteroide) que en su interior
posee tres contenedores que podrían almacenar desde 60 gramos hasta dos kilogramos de regolito, con un tamaño igual o inferior a dos centímetros. El
suministro de nitrógeno, situado alrededor del brazo articulado, será usado
para aspirar las partículas del regolito hacia los contenedores de la cabeza de
muestras. Y la cápsula de retorno de muestras es similar a la que se diseñó
para
Stardust, en la que las muestras
del asteroide serán entregadas a los expertos en Tierra. La cápsula está
montada en la plataforma de equipamiento, sobre unos dispositivos pirotécnicos
preparados para soltarla en el momento preciso y provocar una rotación para
estabilizarla durante la reentrada, descendiendo después usando dos paracaídas. Como apoyo a las operaciones del sistema TAGSAM, se decidió casi a última hora un sistema de cámaras, denominado
TAGCAMS. Está formado por tres cámaras y un sistema de control centralizado. todo el conjunto ha sido elaborado por la firma
Malin Space Science Systems, especialista en este tipo de encargos, que ya ha elevado diversos sistemas de imágenes al espacio en sondas de la NASA, principalmente a Marte. Como hemos dicho, son tres cámaras, que utilizan la arquitectura modular desarrollada por la compañía, de ahí la

rapidez en su elaboración. Dos de ellas se denominan NavCams. Situadas en un lateral de la plataforma de instrumentos, se trata de sistemas gemelos que están basados en la arquitectura de cámaras ECAM-M50, que son cámaras monocromáticas equipadas con sensores CMOS de 2592 x 1944 pixels, y portando ópticas ECAM-MFOV, es decir, de campo de visión medio, un sistema refractor con una longitud focal de 7.1 mm. (f/3.5). Su misión será la de ayudar a la navegación durante el descenso hasta la superficie para la operación de recogida de muestras. la tercera cámara se denomina StowCam, y se sitúa sobre un pequeño pedestal permitiendo a la cámara, situada de lado, apuntar a la cápsula de retorno de muestras. su misión será la de verificar la correcta colocación de la cabeza de muestras dentro de la cápsula y (suponemos) del lanzamiento de la misma en el momento de la entrega. en general es idéntica a las NavCams, salvo que usará la arquitectura ECAM-C50, de dimensiones idénticas de sensor CMOS, pero equipada con un filtro Bayer para tomar imágenes a color. Las tres cámaras están controladas por un sistema de control propio llamado DVR8, o Video Grabador Digital de Ocho puertos. Éste es una suerte de ordenador con dos tarjetas capaz de soportar hasta ocho cámaras, aunque en esta ocasión una soportará una de las NavCams y la StowCam, mientras que la otra controlará la cámara restante. el sistema es capaz de secuenciar comandos, procesar las imágenes, comprimirlas y almacenarlas, y no solo eso, sino que es también capaz de juntar las imágenes para crear vídeos de las secuencias grabadas, tanto del descenso a la superficie como del almacenamiento de las muestras en la cápsula. En el momento del lanzamiento dará un peso en báscula de 2110 kg.
El destino de
OSIRIS-REx se
llama (101955) Bennu, anteriormente conocido como 1999 RQ36, una “china” de
unos 550 metros de diámetro. Mediante telescopios basados en Tierra y en el
espacio, se ha averiguado que es un asteroide tipo C, también llamado condrita
carbonácea, debido a su oscuro color. Es un asteroide NEO, y pasa tan cerca de
la Tierra que existe una posibilidad de 1 entre 1800 de que colisione con
nuestro planeta en el año 2182. Una vez en torno a Bennu, tiene previstos cinco
objetivos: recolectar una muestra del regolito del asteroide para entregarla en
la Tierra para su estudio (analizando su naturaleza, su historia y la
distribución de los elementos mineralógicos y orgánicos que le dan forma);
cartografiar las propiedades globales, la química y la mineralogía para
caracterizar

su historia geológica y dinámica, a la vez que proporcionar referencias
a las muestras entregadas; documentar el regolito de manera morfológica,
geoquímica, establecer su textura y sus propiedades espectrales en las zonas de
recolección de muestras a escala milimétrica; medir las desviaciones orbitales
de este asteroide potencialmente peligroso y restringir las propiedades de Bennu
que contribuyen a este efecto; y determinar las propiedades globales del
asteroide para permitir la comparación directa con los datos tomados por
telescopios terrestres acerca de la población asteroidal.
Su lanzamiento está previsto para el 8 de septiembre, usando un
Atlas V-411 para salir del sistema
Tierra-Luna. Después de un viaje de aproximadamente tres años (incluyendo una
asistencia gravitatoria terrestre el 22 de septiembre del 2017) podrá entrar en
órbita en torno a Bennu entre octubre y noviembre del 2018 tras comenzar las operaciones de aproximación a mediados de agosto. La misión principal durará unos
505 días, estudiando el asteroide a lo largo de varias fases (Exploración Preliminar, Orbita A, Exploración Detallada, Orbita B y Reconocimiento). En las primeras la sonda estará a una distancia segura para realizar tareas de cartografía global y detección de peligros, y tras pasar a las fases de Exploración Detallada y Orbita B, iniciar la fase de cartografía sistemática, seleccionando hasta 12 zonas candidatas para la recogida de muestras, lista que se reducirá a dos, para luego, en la fase de Reconocimiento, hacer pasos a alturas de hasta 240 metros de la superficie, para ejecutar estudios en alta resolución, caracterización de las zonas candidatas
para la recolección de muestras, y finalmente, adquirir el regolito, hacia julio del 2020. El método
para

recoger las muestras parece sencillo, pero es sumamente complejo. Lo
primero es aproximarse, a una velocidad de 0.1
m/s, mientras despliega el brazo articulado. OCAMS, vía SAMCAM, además de las NavCams, se dedicará a
realizar una secuencia de imágenes de todo el proceso. Una vez la cabeza
recolectora contacta con la superficie, en una zona de aproximadamente 25
metros de lado, un chorro anular de nitrógeno fluye por la cabeza hasta el
regolito, lo fluidiza, y lo almacena en uno de los contenedores, todo en aproximadamente
5 segundos. Dispone de nitrógeno para hasta tres secuencias de adquisición. Por
medio de la unidad de medición inercial la sonda podrá verificar que la muestra
ha sido cogida exitosamente. Cuando se considere que ya se han adquirido las
muestras necesarias, la cápsula de retorno de muestras se abrirá, y el brazo
articulado depositará la cabeza de muestras dentro, desenganchándola después.
Una vez se detecte que la cápsula posee la cabeza de muestras, se cerrará y
sellará. Después de acabar el estudio de Bennu, en marzo del 2021 saldrá de su
órbita hacia la Tierra, a donde llegará el 24 de septiembre del 2023,
entregando la cápsula en el mismo lugar en donde aterrizó la de
Stardust y se estrelló la de
Genesis.
Ciertamente, es una misión apasionante y muy importante en términos de
historia del sistema solar y en cuanto a la seguridad futura en caso de que un
asteroide pueda colisionar con la Tierra. Usando filosofía y tecnología
heredada de misiones como MRO, NEAR-Shoemaker
y Stardust, es un proyecto muy
completo que arrojará mucha luz sobre unos cuerpos hasta hace poco bastante
desconocidos. Si hay suerte, pronto (relativamente) podremos disponer de nuevas
muestras de un objeto cósmico distinto a la Luna, a un cometa o el Sol. Desde
aquí le mandamos toda la suerte que tengamos por aquí.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}