El programa New Millenium fue creado en 1994 por la NASA a la vera del
programa Discovery, con el objetivo de conseguir vehículos más baratos y
sencillos en respuesta a la política Faster, Better, Cheaper, promocionada por
el recientemente elegido director general de la NASA. Con estos dos programas
se buscaba simplificar las misiones futuras y reducir sus dimensiones y sus
costes, sin con ello renunciar a la adquisición de resultados científicos de
una calidad sin precedentes.
Tras la apertura oficial del programa, se creó un grupo de trabajo
para señalar los caminos a seguir para desarrollar las nuevas tecnologías que
en el futuro deberían ser implementadas tanto en los orbitadores como en los
aterrizadores. Sin embargo, este grupo llegó a la conclusión de que no solo
deberían quedar restringidos al desarrollo de estos novedosos elementos, por lo
que era necesaria la creación de programas de prueba en las condiciones reales
de operación. Esto significaba, en definitiva, que el programa fabricaría sus
propios vehículos espaciales sobre los que montarían estas nuevas tecnologías.
Así, prepararon dos caminos a seguir: por un lado, se fabricarían satélites
para colocarlos en la órbita terrestre, como el tipo denominado
Earth Orbiter (renombrado poco después
como
Earth Observing), cuyo primer
ejemplar (
Earth Observing-1)
equiparía un sistema de adquisición de imágenes tanto en visible como en
infrarrojo para echar mano, entre otros, a granjeros o geólogos, a la vez que
servía como modelo para poder fabricar cámaras espaciales de menor tamaño y
reducida masa, sin renunciar a la calidad y la sensibilidad. La segunda clase
era la más ambiciosa, la
Deep Space.
Como su nombre indicaba, se tratarían de vehículos que abandonarían la órbita
terrestre para someter a las nuevas tecnologías a las condiciones de
funcionamiento que deberían considerarse “normales” en el futuro. Por lo tanto,
una vez creado este programa se presentaron los dos primeros proyectos de misión
para su desarrollo inmediato. Uno de ellos se asociaba al recientemente creado
programa marciano, y volarían al planeta rojo como parte de la misión para
1999. Se trataba de dos pequeñas sondas gemelas que contactarían rudamente con
la superficie, pero que sobrevivirían, para desplegar un taladro perforador.
Junto con esto, incorporaban lo último en miniaturización: chips, procesador,
batería, transmisor e incluso instrumental científico, para intentar buscar
rastros de agua. El otro era una nave de diseño tradicional, pero con el
encargo de probar tanto hardware como software de diseño avanzadísimo. Su
nombre,
Deep Space 1.

Desde los tiempos primitivos de la exploración espacial, no se había
preparado una nave con tanta tecnología a probar. Sin embargo, tuvo tal
restricción de presupuesto (la mayoría se lo llevaba el desarrollo de los
nuevos elementos) que para su fabricación se tuvo que recurrir a la misma
receta aplicada para la elaboración de Magallanes:
utilizar los componentes de repuesto dejados por misiones anteriores. Como
resultado, Deep Space 1 usó gran
parte de lo dejado tras la fabricación de la mítica Mars Pathfinder. Con esto, y la elección de un lanzador
razonablemente económico, dio como resultado una economía de realización de la
misión casi a la altura de las del programa Discovery.
 Deep Space 1
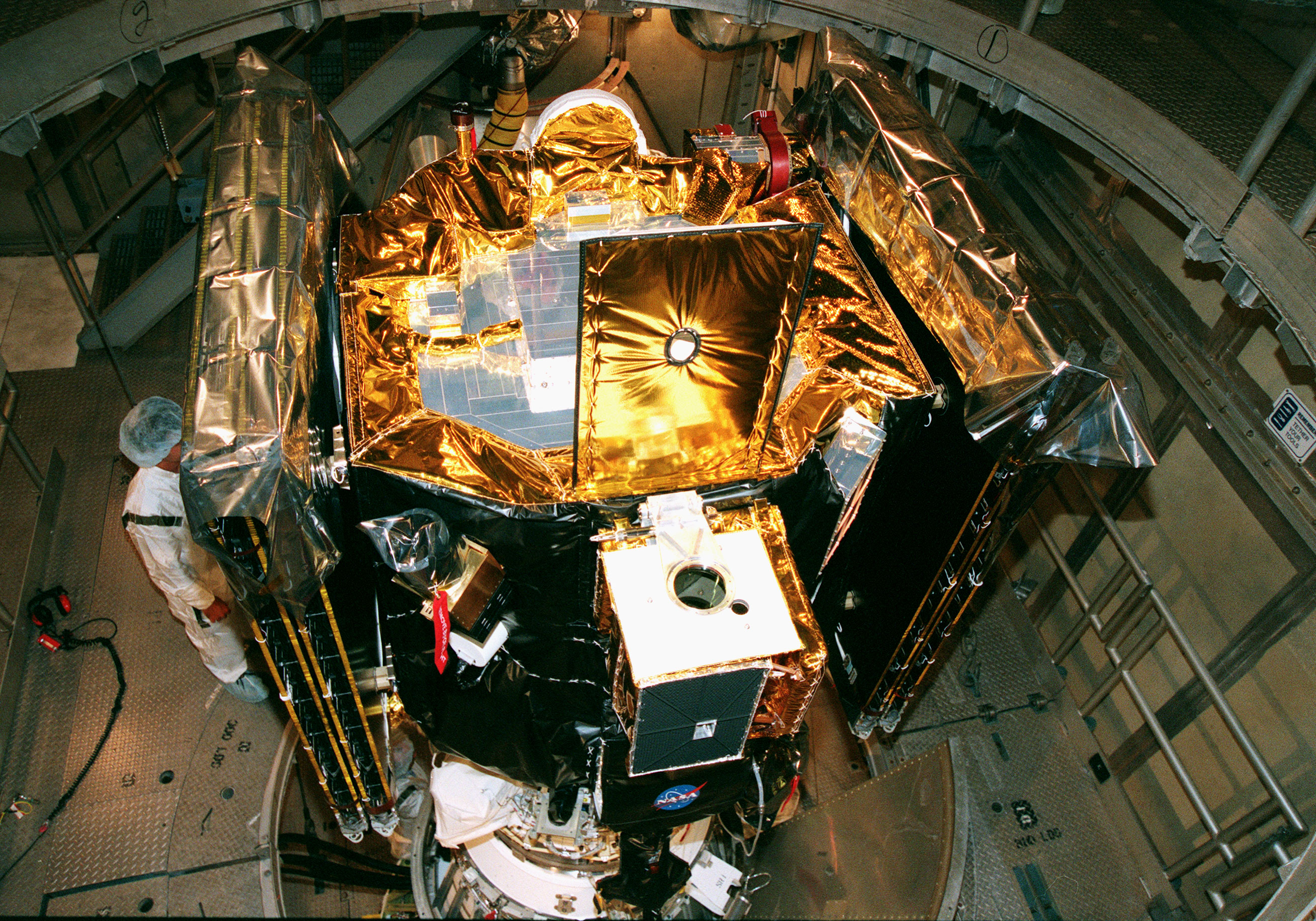
Deep Space 1, vista por
primera vez, no se diferenciaba de otras anteriormente diseñadas por la
agencia. El bus de la sonda era de forma octogonal, fabricado en aluminio, con unas medidas de 1.5 metros de alto, 1.1 de ancho y 1.1 de fondo (una vez colocadas las mantas de protección térmica, el módulo de propulsión de forma cilíndrica y las electrónicas, las medidas eran 2.5 x 1.7 x 2.1), los paneles solares nacían de cada lado, alimentando a una batería de níquel hidrógeno, colocada en la denominada cara solar (llamada así obviamente porque era el lado que ofrecía al Sol). La mayoría del hardware de la nave estaba colocado en la parte exterior, para un más fácil acceso para los técnicos en las fases de montaje y pruebas, mientras que los tanques de combustible estaban montados en su interior. Estaba estabilizada en sus tres ejes, utilizando como sistema de control de actitud un sensor solar (en la cara solar), un escáner estelar, un grupo de propulsores químicos (cuyas electrónicas de gestión eran partes dejadas de la misión
Pathfinder) y una unidad
de medición inercial. Para comunicarse con el centro de control portaba tres
tipos de antenas. La de alta ganancia era un repuesto dejado de la construcción
de
Mars Pathfinder, formada por un
pequeño disco de 30 centímetros, fijado mediante unos soportes a un lateral de
la parte superior de la estructura de la sonda en la cara solar, y
proporcionaba el enlace principal de comunicaciones con Tierra. Para las fases
iniciales de crucero y/o casos de modo seguro, montó tres antenas de baja
ganancia omnidireccionales, también repuestos dejados por
Pathfinder. Dos de ellas fueron montadas al lado de la de alta
ganancia, con una mirando hacia delante y otra en dirección solar, mientras que
la tercera estaba montada en la parte inferior, mirando hacia atrás. La tercera
antena era parte de uno de los experimentos tecnológicos a realizar. El
ordenador de a bordo también estaba elaborado con partes de repuesto del
aterrizador marciano, y alojado en una unidad de electrónica integrada, situada en el lado
opuesto al de la batería. Estaba controlado por un procesador
RAD6000, con 128 MB de RAM para alojar el software de control y el
almacenamiento de datos proporcionados por los sistemas de a bordo, totalizando
este último unos escasos 50 MB. Gran parte del software básico de control (o
software de vuelo), así como los programas de control de infraestructura (un
sistema para cambiar la configuración de vuelo rápidamente para cada fase de
misión) también provenían de aquel proyecto. Este uso de elementos ya probados
potenciaba la fiabilidad y trajo consigo una importante reducción de costes. Se
equipó a la sonda con un pequeño mástil de servicio en la parte inferior para
que los técnicos pudieran acceder a las conexiones de la batería y a las líneas
de transferencia de combustible una vez situada en la punta del cohete. En
total,
Deep Space 1 montó 12
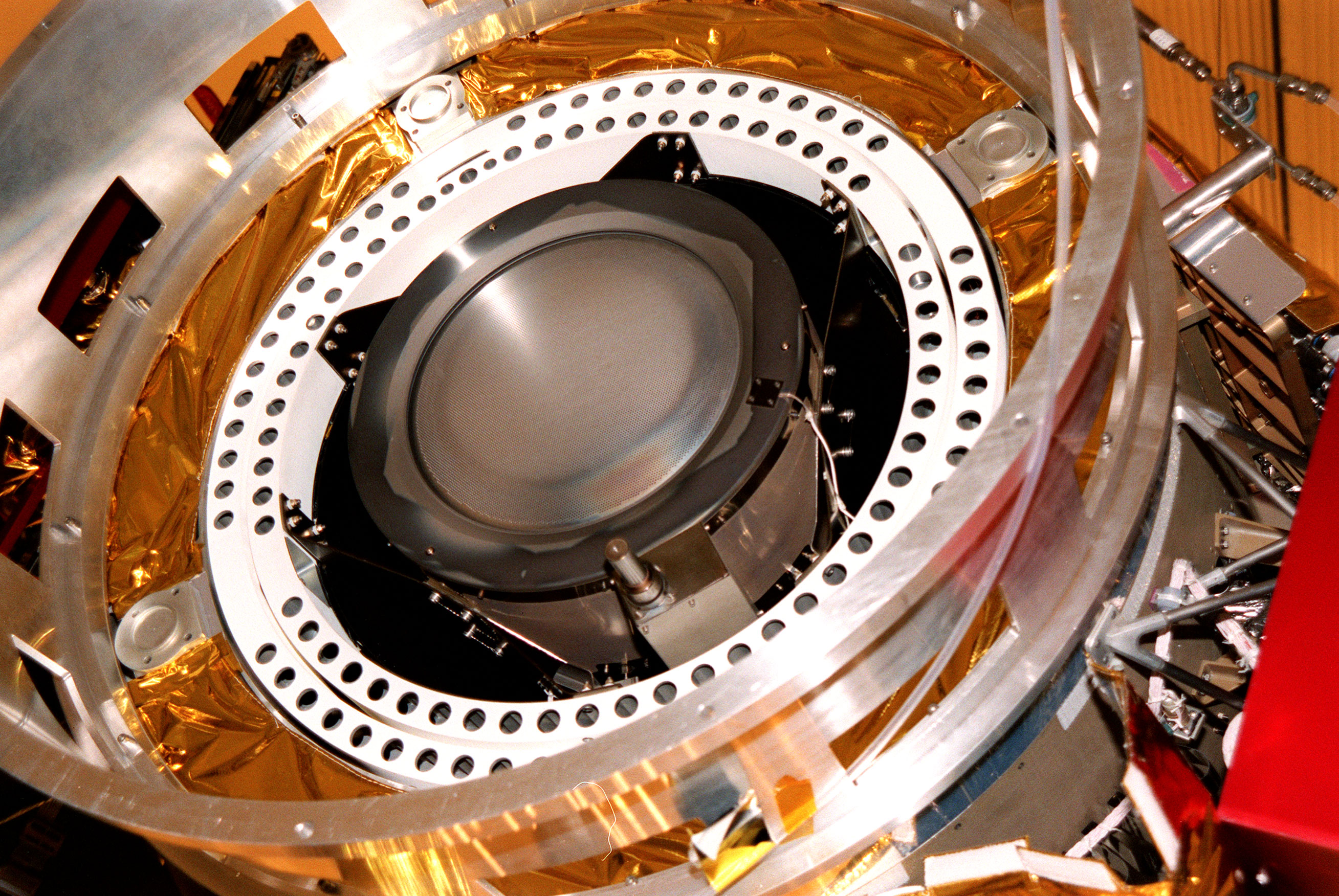
experimentos tecnológicos. El principal era el motor iónico NSTAR. Denominado
IPS, Sistema de Propulsión Iónica, este sistema era un modo de impulsión mediante energía solar, que usaba gas xenón
como propulsante, un elemento
incoloro, inodoro e insípido que es cuatro veces y media más pesado que el
aire. En esencia el propulsor funcionaba emitiendo átomos de xenón, que eran
atacados por electrones expulsados desde un tubo catódico, en una cámara
rodeada de imanes. Estos electrones se llevaban un electrón del átomo de xenón,
transformándolo en un ion, que era atraído hacia un par de rejillas cargadas
positiva y negativamente con hasta 1.280 voltios de potencial eléctrico,
proporcionando un fuerte tirón electrostático, mediante el cual los iones eran
acelerados hasta 100.000 km/h. y expulsados por una tobera de 30 centímetros de
diámetro, en la que un electrodo suministraba electrones para evitar que los
iones emitidos regresaran a la cámara, quitándoles la carga eléctrica. De esta
manera,
Deep Space 1 era impulsada de
una manera muy eficiente y con un consumo ínfimo. Este propulsor proporcionaba
un empuje máximo de 90 milinewtons (como comparación, el motor principal para
la entrada en órbita portado por
Cassini proporcionaba
un empuje de 445 Newtons), aunque el nivel de impulsión era configurable,
siendo 20 milinewtons el mínimo de fuerza que proporcionaba. A este mínimo del
motor consumía apenas 500 Vatios de energía, mientras que colocado a toda su
potencia, necesitaba 2.500 W. Si bien el empuje inmediato proporcionado era
ridículo, el potencial residía en la capacidad de funcionar durante meses y
meses continuamente, acumulando velocidad. Con estos motores se pueden hasta
superar la cantidad de empuje proporcionada por los cohetes lanzadores, y a una
cantidad idéntica de combustible comparada con los propulsores químicos, puede
proporcionar más de diez veces la velocidad que un sistema tradicional. Esta
era la primera vez que se montaba este tipo de dispositivo para una misión de
espacio profundo. Para comprobar su impacto con el medio ambiente espacial y
las superficies de la sonda, equipó un juego de instrumentos de diagnóstico (IDS,
Subsistema de Diagnóstico del IPS) para estudiar sus posibles efectos,
incluyendo dos paquetes de medición interconectados, uno el DSEU/FMP (Unidad de
Electrónicas del Sensor de Diagnóstico) conteniendo dos FGM, Magnetómetros de Núcleo
Saturado triaxiales y dos SCM, Magnetómetros de Bobina de Búsqueda de eje único
y un PWA, Antena de Ondas de Plasma dipolar de dos metros de largo junto con un
preamplificador, y el segundo RSU (Unidad de Sensores Remotos) conteniendo un
RPA, Analizador de Potencial Retardante, dos Sondas Langmuir (LP), dos Calorímetros
(CAL )y dos QCM, Microequilibradores de Cristal de Cuarzo. Debido a las necesidades de consumo del motor
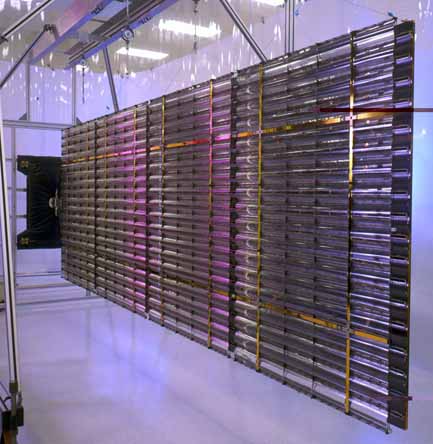
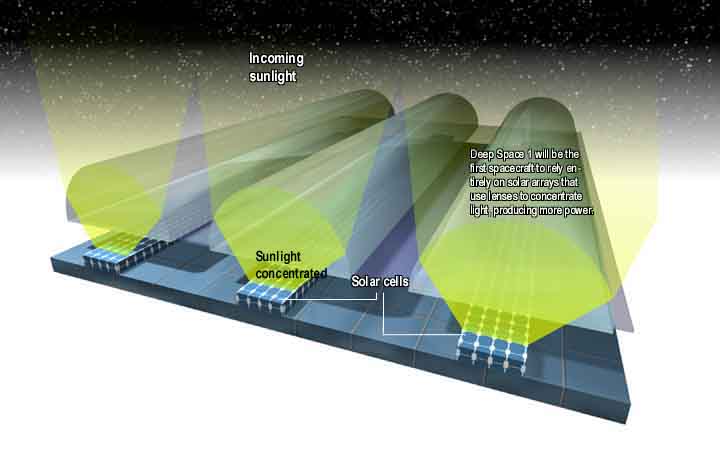
iónico, se necesitaban paneles solares de alta capacidad. Para ello se desarrolló
la tecnología SCARLET, Paneles Solares Concentradores con
Tecnologías de Elementos
Lineales Refractivos. Los dos paneles solares de
Deep Space 1 medían cada uno 4.5 metros de largo por 1.6 de alto,
proporcionando una envergadura, una vez extendidos, de 11.8 metros. Cada panel
portaba cuatro secciones en las que se montaron lentes cilíndricas tipo Fresnel
fabricadas en silicona para así aumentar la capacidad de captación de las
células solares hasta un 20% en comparación con los paneles tradicionales de
similares dimensiones. En total incorporaba
720 lentes concentradoras y 3.600 células solares de alto rendimiento elaboradas a base de
fosfuro de indo y
galio, arseniuro de galio y germanio, en total una fila de 5 células por lente.
Con ello el suministro eléctrico superaba los 2.400 W a distancia Tierra-Sol,
casi las necesidades del motor iónico. Las siguientes tres tecnologías fueron
desarrolladas para reducir la dependencia de la sonda de sus controladores en Tierra.
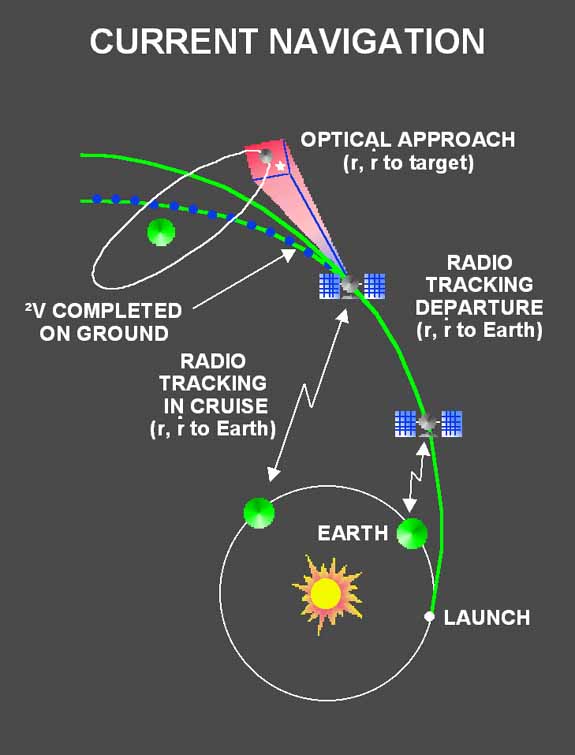
La primera era AutoNav, el software de navegación autónoma. Este programa
informático fue diseñado para que fuera la propia sonda la que gestionara su
navegación a través del espacio. Esta tarea, realizada
antes por técnicos
altamente entrenados sentados en el centro de control, requería que el vehículo
adquiriera mediciones y/o imágenes, tanto del fondo estelar como del objetivo
al que se dirigía, para triangular su posición, y mediante los cálculos
realizados a través de los datos disponibles, incluyendo el seguimiento de la
señal de radio por las antenas en Tierra, podían saber la posición exacta de la
nave que están controlando, y con eso, ver si es necesario modificar la
trayectoria. Este proceso exige personal con un alto grado de experiencia,
tanto en el control de la misión como en las antenas de seguimiento. Por lo tanto,
con AutoNav esta necesidad disminuía enormemente. Disponía de 5 elementos o
funciones para realizar sus tareas: NavRT (proporcionaba la información de las
efemérides críticas a los distintos sistemas de la sonda, como el sistema de
control de actitud), NavExec (con la tarea de planificar y ejecutar toda tarea
relacionada con la navegación, tales como adquisición y procesado de imágenes,
eventos de utilización del IPS o maniobras de corrección de trayectorias, o
TCM’s), ImageProcessor (para procesar las imágenes adquiridas), OD (con la
tarea de realizar computaciones de su posición exacta en el espacio basado en
las imágenes procesadas) y ManeuverPlanner (con el objetivo de realizar la
planificación de los segmentos de impulsión o las TCM’s). Para ello,
Deep Space 1 recurría a todos los
recursos a su alcance (incluyendo su cámara científica de a bordo) para
determinar su localización exacta y con la información a su alcance, calcular y
realizar las maniobras necesarias. Por ello, estaba conectado al sistema de
control de actitud. En general las sondas tienen almacenado en su ordenador un
mapa estelar, y mediante los escáneres estelares, pueden saber donde están
mediante la comparación de las imágenes de las estrellas de fondo con el mapa
que poseen. En
Deep Space 1, además
del mapa estelar (con hasta 250.000 estrellas cartografiadas), tenía en su
memoria un mapa con las órbitas de 250 asteroides. Así, AutoNav triangulaba más
fácilmente su localización a base de realizar imágenes del fondo estelar para encontrar
los asteroides cuyas órbitas tiene almacenadas. Junto con el motor iónico,
estos dos sistemas se aliaban para que AutoNav aprovechara la flexibilidad de
esta impulsión para responder a las necesidades de navegación, tales como
realizar maniobras para la corrección de trayectoria (con los propulsores
químicos o el sistema iónico) o aumentar o reducir la cantidad de velocidad que
el motor iónico proporcionaba para cumplir con la fecha de llegada establecida
a su destino. Este software fue desarrollado en el JPL. El segundo software se
denominó RAX, Experimento de Agente Remoto. A través del uso de RAX,
Deep Space 1 disponía de un programa de
inteligencia artificial que controlaba las acciones de todos los sistemas de a
bordo. Para ello disponía de varias herramientas, entre ellas un planificador
(EUROPA) que generaba un programa de operaciones basado en el tiempo y en los
eventos previstos; un ejecutivo (EXEC) con la tarea de poner en marcha las
actividades programadas por el planificador, limitadas por rendimiento de la
nave, a las obligaciones necesarias por las operaciones y a los objetivos de
alto nivel proporcionados por los controladores en Tierra; y un sistema de auto
diagnostico (Livingstone) para solucionar una amplia gama de problemas sin la asistencia
del centro de control, y con él sería capaz de manejar una amplia variedad de
situaciones de a bordo gracias a su acceso inmediato a la telemetría de
ingeniería, mejor que en un concepto de misión tradicional. Este programa fue
desarrollado conjuntamente en el centro de investigación Ames de la NASA y la
Universidad Carnegie Mellon. El tercero era el BMOX, Experimento de Baliza de Monitorización
de Operaciones. En una época en la que cada vez hay más y más sondas en el
espacio, y como a causa de eso las antenas de la Red de Espacio Profundo están
saturadas a causa del seguimiento de tantos vehículos, este sistema se había
desarrollado para, utilizando el sistema de comunicaciones y la información de
los sistemas de a bordo almacenada en el ordenador, comunicar un informe de su
estado con una serie de tonos codificados, indicando desde su condición
perfecta hasta la petición de ayuda inmediata. En
Deep Space 1 este sistema estaba programado con cuatro modos
generales, o tonos. El tono verde informaba al control de misión que todo
estaba en correcto estado. El tono naranja notificaba que había ocurrido una
anomalía pero que había sido capaz de resolverla, y aún con ello la sonda se
encontraba en condición aceptable. El tono amarillo alertaba al centro de
control que necesitaba asistencia a causa de que había ocurrido un fallo que
ponía en riesgo la misión, o para salvar datos de alta prioridad. Y finalmente
el tono rojo, que era ya la petición urgente de asistencia a causa de un problema
crítico que la sonda no podía manejar. Este sistema utilizaba software de
inteligencia artificial a partir de la tecnología ELMER para recolectar y
resumir la información para traducirla a uno de los cuatro tonos. El principal
objetivo de este sistema era facilitar las comunicaciones normales con Tierra,
por lo que, 1º: este tono es más simple de recibir (en vez de usar las antenas más
grandes de la Red, usan otras de tamaño más modesto), y 2º: es más fácil de
traducir (así, una vez recibido y transmitido al control, la atención de la
antena pasa rápidamente a otra sonda). Este sistema fue desarrollado por el
JPL. Con estos tres elementos, lo que se buscaba era reducir al máximo el
personar requerido y el tiempo de transmisión a la Red de Espacio Profundo
durante las largas etapas de crucero de una misión, con la consiguiente drástica
reducción de la factura total del proyecto. El siguiente era un sistema
diseñado para mejorar las comunicaciones de una sonda con Tierra. Recibía el
nombre de Pequeño Transpondedor de Espacio Profundo o SDST. Este hardware era
una versión a escala y bajo peso de los tradicionales transmisores/receptores montados
en las sondas espaciales a partir del desarrollado para
Cassini. Tenía la capacidad de transmitir en banda-X y banda-Ka, y
tenía sus mismas funciones, es decir: receptor, detector de comandos,
transmisión de telemetría, modulación de la señal, funciones de control, y
además se encargaba de la generación del tono de baliza, todo en un mismo
paquete mientras que sistemas anteriores confiaban en subsistemas separados.
Todo en un paquete de apenas 3 kg. y un consumo energético de 12.9 vatios, a
base de nuevos tipos de circuitos integrados y métodos novedosos de
empaquetado. Otra gran ventaja del diseño de SDST era su disposición modular,
de forma que, dependiendo de los requisitos de cada misión, resultaba
configurable para añadir o retirar prestaciones. La empresa Motorola, a través
del grupo de espacio y sistemas tecnológicos de la división de sistemas
espaciales del Gobierno, elaboró este aparato. Unido a este transmisor, el
KAPA, Amplificador de Potencia en banda-Ka de Estado Sólido, junto con una antena
específica montada al lado de dos de las antenas de baja ganancia, permitía a
Deep Space 1 transmitir en esta
frecuencia. La banda-Ka es una frecuencia de transmisión muy tentadora para los
técnicos y los científicos porque permite enviar la misma cantidad de datos que
mediante la banda-X, pero con un menor consumo energético, aunque es altamente
vulnerable a ser distorsionada por el vapor de agua atmosférico. Aún así, el
probar su viabilidad era un objetivo de suma importancia. Para ello,
comunicaría solamente con las antenas de la Red de Espacio Profundo situadas en
Goldstone, California, las únicas en ese momento con sistemas de recepción en
esta frecuencia. Esta fue la primera sonda en ser capaz de enviar y recibir
esta banda, aunque existían ya en el espacio dos sondas (
Mars Global Surveyor y
Cassini)
que tenían la posibilidad de recibirla. Fue elaborado por la empresa Lockheed
Martin. Además, portaba otros tres experimentos de hardware miniaturizado. El
primero era el MFS, Estructura Multifuncional. Situada detrás de la unidad de
medición inercial, y al lado de la unidad de electrónica integrada, eran un
conjunto de elementos que controlaban las funciones electrónicas, termales y
estructurales, tareas generalmente realizadas por sistemas independientes. Este
dispositivo manejaba la administración de la temperatura de la sonda a base de
elementos basados en el cobre junto con dispositivos de transferencia de calor
unidos a la tapa de la caja, cuya capa externa servía como radiador con el que
expulsar el calor sobrante al espacio, a la vez que mediante una red de
circuitos unidos a unos conectores flexibles especiales servían como sistema de
distribución de energía y a la vez para la transmisión de datos. El desarrollo
de este elemento fue llevado a cabo por el Laboratorio Phillips de la Fuerza
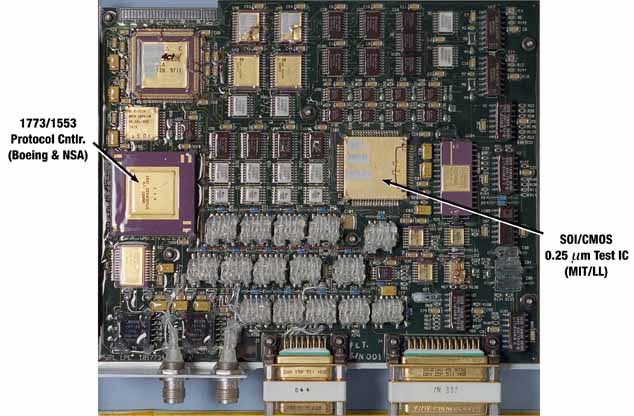
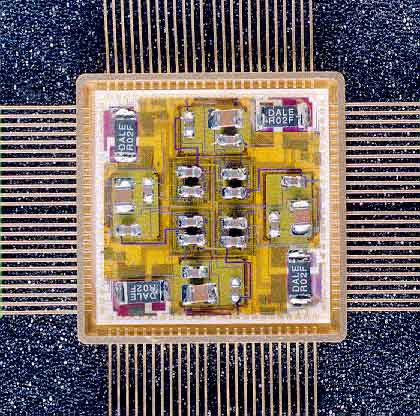
Aérea de EE.UU. junto con Lockheed Martin Astronautics. El siguiente era LPE, Electrónicas de Baja Energía,
y era un pequeño dispositivo que incorporaba un oscilador de
anillo, un conjunto de transistores y un multiplicador, para probar la
administración de micropotencia, arquitecturas de baja energía y lógica de baja
actividad y tecnologías de bajo voltaje, y todo esto con un consumo eléctrico
ínfimo. El Laboratorio Lincoln del Instituto Tecnológico de Massachusetts se
encargó de su desarrollo y elaboración, en conjunción con el JPL. El último era
PASM, Módulo de Activación e Interrupción de Energía, desarrollado
conjuntamente por Boeing y la división de misiles y espacio de Lockheed Martin.
Este elemento era un sistema que monitorizaba la energía de la nave mediante un interruptor de energía
inteligente. Consistía en ocho diminutos interruptores
emparejados en cuatro grupos como pares redundantes, capaces de sentir la
cantidad de voltaje y corriente eléctrica producida, y si era necesario,
limitar el nivel de corriente si se consideraba necesario. Y por último, a
pesar de ser una misión eminentemente tecnológica, no renunciaba a hacer
ciencia. Como la filosofía de la NASA en ese momento era conseguir resultados
comparables o superiores con misiones más baratas, era necesario crear una
nueva generación de instrumentos científicos de bajo peso, elevado nivel de
miniaturización y alto rendimiento. Así, se desarrollaron dos paquetes
científicos para su doble cometido, tanto tecnológico como científico. El
primero era el sistema de televisión de
Deep
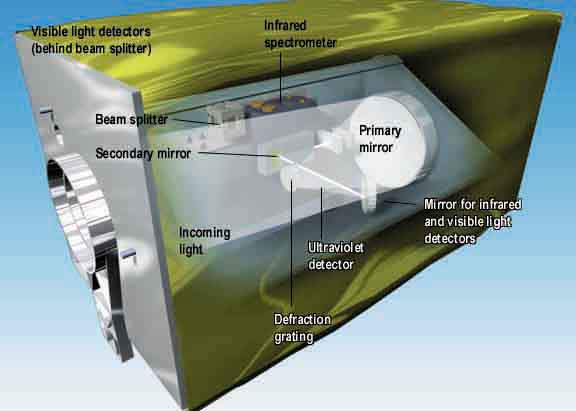
Space 1. Se trataba de MICAS, Cámara-Espectrómetro Integrado en Miniatura,
y comprendía cuatro tipos de sensores. Por un lado, portaba dos cámaras de luz
visible en blanco y negro, una equipada con una matriz CCD convencional de
1024x1024 pixels, mientras que la segunda poseía un sensor de pixels activo
(APS) basado en tecnología CMOS, de 256x256 pixels, mientras que los otros dos
sensores eran un espectrómetro de imágenes en infrarrojo (un conjunto de diodos
sensibles al infrarrojo, basados en la tecnología detectora desarrollada para
el sistema NICMOS del telescopio
Hubble
acompañado por un refrigerador) y otro del mismo tipo pero en ultravioleta
(empleando un CCD sensible a la radiación ultravioleta de 35x164 pixels), que
funcionaban usando el mismo método de operación el sistema MOC de
Mars Global Surveyor, para poder
realizar análisis completos del objetivo, además de disponer electrónicas
integradas para servir a los cuatro detectores. Estos cuatro detectores se
encontraban dentro de una estructura compacta que pesaba 12 kg. en cuyo
interior se instaló un telescopio tipo gregoriano fuera de ejes con un espejo primario de 10
centímetros de apertura. Tanto la estructura, los soportes
ópticos, los espejos y las rejillas de difracción se elaboraron en carburo de
silicio, material ligero e indeformable por los cambios de temperatura, lo que
permitía su fabricación en salas a temperatura ambiente, mientras que permitía
expandirse o retraerse como una unidad para mantener un enfoque estable en todo
momento. Su estructuración interna estableció longitudes focales distintas para
los distintos detectores: 171 milímetros para el espectrómetro ultravioleta (
f/1.7), 677 para los sistemas visuales (
f/6.8) y 752 para el espectrómetro
infrarrojo (
f/7.5), y en su apertura
se añadió una tapa transparente protectora que dejaba entrar la luz visible e
infrarroja. Para una óptima recolección de luz para todos los sensores, el
espejo primario fue recubierto en platino, el que servía al espectrómetro
ultravioleta era de carburo de silicio, los que dirigían la luz a los sistemas
visibles e infrarrojos poseían recubrimientos de aluminio y el específico para
el espectrómetro infrarrojo estaba recubierto de oro. Estaba montado delante de
la unidad de medición inercial, en el lado opuesto al de la antena de alta
ganancia, y asociado al sistema fue montado un pequeño escudo solar sobre un
soporte, delante del instrumento, para evitar que la luz solar entrara por el
telescopio y molestara al funcionamiento del aparato. Una vez en el espacio,
tenía tres tareas que realizar. Por un lado, establecer, mediante la prueba de
su rendimiento, la utilidad de este sistema para futuras misiones espaciales;
en segundo lugar, adquirir imágenes de su objetivo a la vez que realizaba
análisis espectrales en infrarrojo y ultravioleta para recoger datos
científicos valiosos; y además, realizar imágenes para que las usara AutoNav,
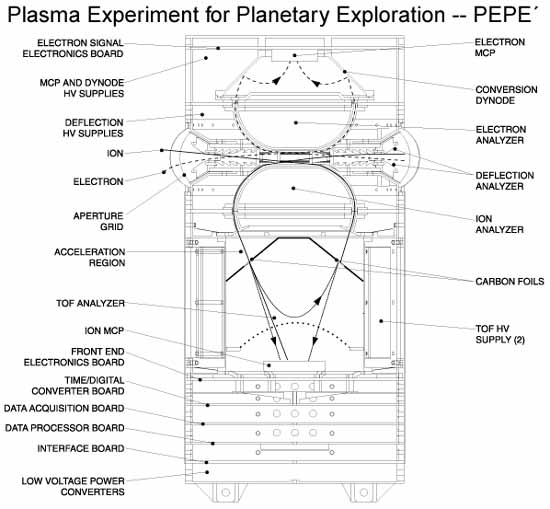
principalmente durante la fase de aproximación a su objetivo. Y el segundo
paquete era PEPE, Experimento de Plasma para Exploración
Planetaria. Como su
nombre indicaba, el objetivo de este aparato era estudiar el entorno espacial y
el viento solar en busca del plasma con un juego de pequeños sensores detectores
de iones y electrones servido por entradas comunes en los que las partículas
eran desviadas a cada sensor por un campo eléctrico, todo dentro de una
compacta carcasa. PEPE se basaba enormemente en el instrumento CAPS de la sonda
Cassini, con muchas de sus funciones
igualadas en un instrumento que pesaba 5.6 kg. y solo consumía 9.6 vatios, es
decir, que tenía un 25% de la masa y consumía un 50% menos de energía del
aparato del que derivaba, reteniendo una capacidad de medición prácticamente
idéntica, barriendo los 360º alrededor de la sonda de manera electrostática,
por lo que carecía de partes móviles, además de poseer una alta densidad de
empaquetado y un sistema de ocho suministros de alto voltaje para los
detectores. Como MICAS, tenía tres objetivos que cumplir: primero, determinar
su viabilidad como un diseño susceptible de que sondas futuras pudieran
montarlo para misiones especializadas; segundo, recoger datos científicos
interesantes durante la etapa de crucero y durante el encuentro con su
objetivo; y tercero, tratar de determinar el impacto del motor iónico tanto en
la sonda y en sus sistemas como en el entorno espacial, en especial en el
viento solar. Estaba montado en la cara solar, en la esquina superior
izquierda, al lado de la antena de alta ganancia. PEPE tenía una tasa de
recolección de datos muy superior con respecto a la capacidad de almacenamiento
del ordenador, y fue desarrollado conjuntamente en el Instituto de
Investigación del Suroeste y el Laboratorio Nacional Los Álamos. Una vez todo
quedaba montado, a plena carga en el momento del lanzamiento, declaraba una
masa de 486.3 kg., de los cuales 81.5 correspondían al combustible de xenón y
31.1 al químico para los propulsores de control de actitud.
Como habréis comprobado en este último casi interminable párrafo, a
pesar de sus reducidas dimensiones, era un vehículo con un altísimo grado de
complejidad, por lo que suponía una misión de alto riesgo para la NASA, no solo
porque equipaba esas 12 novedades tecnológicas, que además, la inmensa mayoría
de ellas tendrían que trabajar perfectamente, y a la vez, mientras que los
elementos considerados estándar con los que fue dotada, tales como el escáner
estelar, el ordenador o el sensor solar, eran ejemplares únicos. Deep Space 1 poseía una redundancia
enormemente limitada o nula, lo que aumentaba aún más el riesgo de la misión.
Un pequeño retraso en el desarrollo (principalmente en la entrega de
PEPE) obligó a cambiar los planes iniciales de misión. Sin embargo, el tiempo
íntegro de realización del proyecto, desde la primera idea, hasta colocarlo en
la punta de su lanzador, supuso un tiempo récord: apenas 39 meses. Al ser una
misión no tradicional, la tarea primaria comenzaba prácticamente tras la
separación de la sonda de la última etapa del cohete. Como bonus, y a la vez
experimento tecnológico, se programó un sobrevuelo con el asteroide 1992 KD, en
el que se quería probar a la vez las capacidades de AutoNav y el rendimiento de
MICAS y PEPE.
El 24 de octubre de 1998, mediante un
Delta 2-7326 (y portando una carga secundaria, un minisatélite
llamado
SEDSat-1)
Deep Space 1 fue colocada en el espacio.
Se eligió esta configuración del
Delta 2
porque era una de las más económicas, además de ser una de las menos potentes,
ya que no necesitaba una gran cantidad de energía durante el lanzamiento. En el
instante del lanzamiento (como el resto de sondas en este momento crucial), la
sonda tenía todos sus sistemas principales apagados, la batería cargada a tope,
los calentadores eléctricos activos y los circuitos detectores de la separación
en marcha. Tras 50 minutos de proceso, la etapa superior
Star-37FM separaba la sonda, y con esto, al detectar que ya volaba
libre, el ordenador arrancó en 30 segundos. La primera orden era buscar su
orientación, usando el escáner estelar. Una vez adquirida toda la información
necesaria y transmitida por AutoNav, la sonda se orientaba a la posición
calculada en la que debía estar el Sol (en ese momento estaba en la sombra
terrestre), para después desplegar los paneles solares y posicionarlos para
recibir los primeros rayos solares. Cuando detectaba que los paneles comenzaban
a generar electricidad, se ordenaba el encendido del transpondedor para enviar
sus primeras señales y un primer informe de estado. Este aspecto tan simple, y
realizado por tantas sondas anteriores, era uno de los hitos cruciales, ya que
suponía el primer test tecnológico de toda la misión. Si los paneles no
producían energía o el transpondedor no se encendía, la misión estaba acabada.
Por suerte todo fue bien, y a pesar de un pequeño retraso en la recepción de la
primera señal (había tardado algo más de tiempo en determinar su orientación),
Deep Space 1 se puso en camino hacia el
espacio interplanetario.
Los primeros tests tuvieron lugar en los paneles solares, para
comprobar su rendimiento y sus características eléctricas. Así, el 31 de
octubre practicaron una serie de maniobras con los paneles solares,
principalmente para encontrar el mejor ángulo para una captación más eficiente
de energía. Tras determinar su comportamiento (y ver la precisión del
alineamiento con el Sol, que hizo innecesarios cambios en su software),
comenzaron a probar el resto de sistemas. El primer encendido del motor iónico
tuvo lugar el 10 de noviembre, aunque solo estuvo en marcha algo más de cuatro
minutos debido a un apagado prematuro. Después de analizar el problema, se
determinó que en las rejillas eléctricas habían quedado restos de algún gas y
material expulsados tras la separación entre la sonda y la etapa superior. A
base de apagados y encendidos, las rejillas fueron limpiadas, y el 24 de

noviembre por fin se puso en marcha sin problemas, y estuvo funcionando durante
dos semanas. Antes, AutoNav había sido activado, para completar sus primeras
pruebas, entre ellas utilizar MICAS para localizar asteroides, necesarios para
su orientación. Para ello, maniobró a la sonda para que la cámara adquiriera
imágenes del fondo estelar, y sin necesitar asistencia del personal de la
misión. A pesar de entrar en modo seguro por perder de vista al Sol, la prueba
fue satisfactoria. Las pruebas con el motor iónico, principalmente durante los
primeros cinco días, se centraron en el funcionamiento del sistema de
regulación de impulso. El nivel mínimo era el 0, el más alto, 111. Entre los
días 24 y 30, modificaron el nivel de impulso entre el 6 y el 90, para
comprobar el ratio de consumo eléctrico. Así, en conjunción con nuevos
experimentos con los paneles solares, a los cuales por primera vez se les pedía
una alta demanda de energía, se comprobó que, en aquel momento, el nivel óptimo
entre impulso y consumo eléctrico era el 83. Si aceleraba un poco más, entonces
era necesario que la batería apoyara el funcionamiento del propulsor. El 8 de diciembre
el motor iónico fue apagado. Había funcionado más de las 200 horas previstas
inicialmente antes del comienzo de la misión. De esta manera, se adquirió la
experiencia necesaria para operarlo, y sobre todo se comprobó la cantidad
práctica de impulsión que proporcionaba, a base de medir el desplazamiento
Doppler a través del sistema de comunicaciones y las antenas de la Red de
Espacio Profundo.
El mismo día que se apagó el motor, se activó el experimento PEPE y el
amplificador en banda-Ka. El instrumento de plasma comenzó a analizar el
entorno que le rodeaba, y pudo detectar exitosamente el viento solar. Cuando el
propulsor volvió a ser activado, empezó a estudiar cualquier efecto que el
chorro de iones pudiera provocar. A su vez, la sonda comenzó a transmitir en
esta banda, con un ratio inicial cuatro veces superior al que se conseguía con
los sistemas tradicionales en ese momento. Durante las semanas que siguieron se
comprobó que se podía configurar el ratio de transmisión en 14 niveles
distintos. Tras esto fue apagado para su posterior reactivación en enero de
1999. MICAS fue encendido el 11 de diciembre para comenzar a adquirir datos. Ese
mismo día el motor iónico fue encendido de nuevo brevemente para unos breves
chequeos. El 18 de diciembre, AutoNav fue programado para que tomara posesión
de la navegación de Deep Space 1. Su
primera operación fue preparar el motor iónico para su encendido, para luego
ordenar su puesta en marcha tras comprobar su posición en el espacio.
En el mes de diciembre también
se realizaron las pruebas definitivas del transpondedor. A su vez AutoNav
manejó eficientemente la impulsión del motor iónico, actualizando los perfiles
de trayectoria y empuje para responder al esquema de vuelo almacenado en el
ordenador. A mitad del proceso de impulsión, suspendió temporalmente el
funcionamiento del motor para usar a MICAS para que adquiriera imágenes, y
realizó los giros necesarios para un escaneo completo del fondo estelar. Con
esto se pudo hacer una mejora en el software de procesamiento de imágenes,
además de dar los primeros detalles de su rendimiento. Tras esto, el motor
iónico se volvió a encender, y así estuvo hasta el 5 de enero de 1999,
finalizando el primer segmento de impulsión de la misión, acumulando 850 horas
de funcionamiento exitoso.
Inmediatamente después, se envió nuevo software de control para PEPE,
para que luego, dos días después pudiera ser configurado a su tasa máxima de de
recolección de datos científicos, combinándose con el instrumento CAPS de la
sonda Cassini en el estudio del
viento solar. Posteriormente, con otra mejora de software se le añadió la
posibilidad de detectar los iones emitidos por el motor iónico. De esta manera
se quería diferenciar entre el soplo más leve del viento solar y el chorro del impulsor.
El mes de febrero fue el destinado a probar la baliza de monitorización, y los
resultados mostraron el buen rendimiento del sistema, y durante el transcurso
de la misión primaria se usó este elemento para probar los distintos
componentes. AutoNav también comenzó a
aumentar sus capacidades, cuando la sesión semanal de adquisición de imágenes
para su orientación comenzó a hacerlas por su cuenta, sin supervisión del
equipo en Tierra, junto con la primera determinación de su posición en el
sistema solar, algo que ninguna otra sonda podía hacer por su cuenta, y la
Estructura Multifuncional fue activada por primera vez el día 26, y desde
entonces, hasta septiembre, la información adquirida estaba en buen acuerdo con
las previsiones previas al lanzamiento de la misión. Un día antes de la MFS,
llegó la a activación de PASM, que proporcionó, todo el tiempo que funcionó,
información acorde a las predicciones. A medida que la misión avanzaba, MICAS
acumuló un volumen de de datos importante, a base de apuntar y tomar imágenes
de los objetivos a los que apuntaba, entre ellos Marte, tras retirar la tapa
protectora.
A medida que se aproximaba a su objetivo, AutoNav por fin pudo
utilizar su pleno potencial. Hasta el 12 de abril, el software había actuado
basándose en el perfil de trayectoria cargado en el ordenador. A partir de
entonces, el sistema manejó la navegación de Deep Space 1 usando sus propios cálculos, ordenando por su cuenta
al motor iónico a proporcionar el impulso necesario para cumplir con la fecha
de llegada. El 27 de abril, ordenó el apagado. Habían sido seis semanas de
funcionamiento continuo y había operado exitosamente, consumiendo apenas 5 kg.
de xenón y cambiando la velocidad de la
sonda en 300 metros por segundo. Un enorme salto adelante.
A comienzos de mayo, la calibración y las pruebas de MICAS habían
concluido. El rendimiento del sistema había decepcionado: las cámaras visibles
se mostraron menos sensibles a lo proyectado y las imágenes se encontraban
distorsionadas a causa de la dispersión de la luz provocada por el escudo solar.
También se detectaron otros pequeños problemas en las cámaras, causados por la
posición en la que el instrumento había sido colocado en la sonda, y también
por la disposición interna del aparato. En especial, el sensor CCD, construido
defectuosamente, sufría de saturación cuando fotografiaba objetos brillantes,
por lo que en ese momento se le consideró poco adecuado en los últimos minutos
durante las maniobras de encuentro futuras. Se consideró que eran problemas
subsanables en versiones posteriores del sistema. Gracias al desarrollo de un
nuevo software, se pudieron corregir estos efectos sobre las imágenes. Sin
embargo, el sensor ultravioleta se demostró como enormemente problemático. Un
fallo electrónico desembocó en que los datos recogidos por el aparato no
pudieran manejarse apropiadamente, y por lo tanto fue incapaz de devolver
información científica, a pesar de que el propio sensor respondía a los
estímulos luminosos. El único que funcionaba tal y como se diseñó fue el
detector de infrarrojos. Tras esto, le llegó el momento al RAX.
RAX no había sido diseñado para controlar a Deep Space 1 durante toda su misión. Así, fue programado para
manejar el motor iónico y otros sistemas escogidos, y el 17 de mayo se inició
el periodo de pruebas de 48 horas de duración. En la mañana del 18, cuando el
sistema debía haber ordenado al motor iónico que se desactivara, EXEC no
transmitió la orden. Esta anomalía obligó a paralizar el experimento, y la
sonda empezó a transmitir telemetría sobre el suceso. RAX seguía en
funcionamiento, y así, tras analizar el problema (con la utilísima asistencia
del sistema de autodiagnóstico Livingstone del software) se determinó que había
un pequeño “gusano” en el programa. Tras esto, se ordenó detener el experimento
por completo, que estaba completado en un 70%. Una vez corregido el problema,
el 21 de mayo se realizó lo que quedaba del experimento. Resultó un éxito, no
solo en cuanto a la planificación y la ejecución de las órdenes, sino que el
programa de autodiagnóstico resolvió los tres problemas simulados que el equipo
de Tierra colocó a bordo. Por un lado, se enfrentó con una unidad electrónica
con un pequeño fallo. El sistema solucionó el problema apagando y encendiéndolo
de nuevo. El segundo era un sensor que proporcionaba información errónea, que
el RAX solucionó ignorando el sensor tras determinar que era poco fiable. Y en
tercer lugar, tuvo que lidiar con un propulsor que estaba atascado en posición
de apagado. El software lo detectó y encendió un modo mediante el cual no
dependería del propulsor. Una vez concluyó el experimento, volvieron a poner a
la sonda a su configuración normal, (a la vez que iniciaron los experimentos
con el LPE) y empezaron a preparar el sobrevuelo a su objetivo. Ya había
acumulado más de 75 días de operación con el motor iónico.
El asteroide 1992 KD, ahora conocido como 9969 Braille, se consideró
como objetivo a causa de su extraña órbita, fuera del cinturón de asteroides.
Ésta transcurre fuera de la eclíptica, a distancias entre un poco más de la
distancia Tierra-Sol en su punto más cercano, y a mitad de la distancia Tierra-Júpiter
en su más lejano. Se estimaban unas dimensiones de entre 1 y 5 km. de diámetro,
con una forma alargada. Apenas era brillante, y a causa de eso no se podían
descubrir muchas cosas acerca de él. Usando una red de telescopios en Tierra
con detectores especiales se observó la huella espectral del asteroide,
sugiriendo que su composición podría ser similar a la del gran asteroide Vesta.
Este fue el objetivo de una sonda espacial menos estudiado desde Tierra, y con Deep Space 1 lo que se buscaba era
determinar su tamaño, forma, geografía, composición (mediante MICAS), así como determinar si influía en el viento solar
y cómo (a través de PEPE y los instrumentos de diagnóstico del motor iónico).
El objetivo era alcanzarlo el 29 de julio, y convertir a esta sonda en la que
más cerca había pasado de su objetivo. La distancia esperada era de unos 15
km., aunque se confiaba en que pudiera pasar a menos de 5. Para su
aproximación, la sonda confiaría completamente en AutoNav para llevarla a la
distancia solicitada. Así, se esperaban adquirir imágenes de Braille con
niveles de resolución de hasta 30 metros.
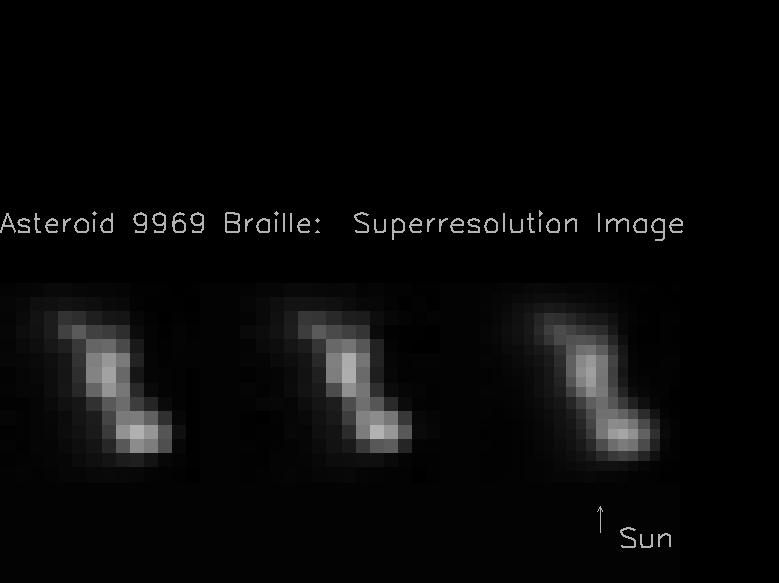
Una vez se realizaron unos últimos cálculos, se esperaba que AutoNav
dirigiera a Deep Space 1 a pasar a
240 metros de la superficie de Braille. Sin embargo, la realidad del asteroide
complicó enormemente la maniobra. El pequeño tamaño del objeto, unido a su bajo
índice de luminosidad, provocó que AutoNav no fuera capaz por sí mismo de
encontrarlo, y cuando lo hizo, un problema del software provocó una entrada en
modo seguro en medio de una de las secuencias de adquisición de imágenes de
navegación. Cuando la sonda fue restaurada a su modo de operación, tuvo que
hacer las maniobras finales (asistencia del control
de tierra incluida) con
menos información que la necesaria, por lo que al final pasó a 26 km. de
Braille. Las imágenes transmitidas apenas distinguían la forma del asteroide
(aunque se pudieron calcular sus dimensiones, estableciéndolas en 2.1 x 1 x 1
km.), aunque el detector infrarrojo confirmó que su composición era muy
parecida a la de Vesta. A partir de esto, se teorizó que Braille podría ser un
fragmento de Vesta expulsado al espacio a causa de un gran impacto. Unos
últimos datos interesantes mostraron una suerte de campo magnético alrededor de
Braille.
La conclusión tras el encuentro fue que, a pesar de la decepción que
supuso el no ver bien a Braille, había operado razonablemente bien. Como
AutoNav apenas tuvo la información necesaria, le costó horrores dirigirse a la
distancia programada, aunque las decisiones que tomó la llevaron en la
dirección correcta a pesar del problema en el ordenador. Así, siguió
recorriendo el espacio más allá de la órbita terrestre, continuando con sus
tests tecnológicos, hasta que el 18 de septiembre se cumplió el período de
misión principal.
Ese momento era importante. Se había previsto que, si tras el
encuentro asteroidal
Deep Space 1
seguía funcionando correctamente, y la NASA lo aprobaba, se podría llevar a la
sonda a encontrarse con otros cuerpos del sistema solar. En la posición en la
que se encontraba, estaba en disposición de dirigirse a dos destinos distintos.
Primero, se aproximaría al objeto 107P/Wilson-Harrington, un cuerpo de
transición entre cometa y asteroide, ya que su última actividad cometaria se
observó en 1949.
Deep Space 1 podría
sobrevolarlo en enero del 2001, y ver qué sucedía realmente en él. Después, alcanzaría el cometa
19P/Borrely, uno de los cometas de periodo corto más activos. El
sobrevuelo podría completarse en septiembre del 2001. Para reducir aún más el
presupuesto de total asignado a la ampliación, además de usar AutoNav junto con
el motor iónico, se usaría por primera vez de manera operacional la baliza de
monitorización.
Poco después de apagar el motor iónico (activado y proporcionando
empuje desde día y medio después del encuentro asteroidal), en octubre comenzaron
las pruebas para llevar a los instrumentos a su configuración científica,
incluyendo la validación final de MICAS. Esta había sido retrasada muchas veces
para probar otros componentes de a bordo, y aunque el problema de la luz
dispersada había sido caracterizado y mitigado, el rendimiento de los sensores
funcionales, en especial el APS no había sido estudiado por completo. Esta fue
una de las causas de la decepción en Braille: como se decidió emplear el APS
para adquirir imágenes científicas y secuencias para navegación, además de
colocar velocidades de obturación demasiado optimistas (el brillo real del
asteroide resultó ser muchísimo menor) nunca consiguió fijar la cámara de
manera continua sobre el objeto. Antes de centrar su atención en MICAS,
comenzaron a elevar el voltaje para el sensor medidor de iones de PEPE. Fijado
durante la misión primaria en -8000 a +8000 voltios, para obtener resultados de
alta resolución resultaba necesario elevar el voltaje al máximo, 15000 voltios
tanto positivos como negativos. Por desgracia, cuando lo estaban subiendo a
13000 en el lado positivo, después de alcanzar los 12750, cayó a 5500. Para
evitar daños en el sensor, y reteniendo la máxima resolución posible, se
configuró a -8000 a +5500 voltios. En cuanto a la cámara, aprovechó un
alineamiento afortunado con Marte (estaba a 55 millones de km.) para realizar
todo el juego de pruebas para los sensores CCD, APS e infrarrojo. Una vez
sustraídos los problemas conocidos, se demostró que el rendimiento de los tres
sistemas (y en esencia del sistema por completo) era el esperado antes del
lanzamiento, lo que sería de utilidad durante la misión extendida, de manera
que se aprovechó también para hacer un análisis infrarrojo de Marte durante 48
horas, aproximadamente dos rotaciones del planeta. Una vez finalizado el
experimento (que llevó además a apuntar a varias estrellas muy débiles),
regresó a actitud de crucero.
La fatalidad golpeó a la sonda pocos días después, el 11 de noviembre,
cuando el escáner estelar dejó de funcionar. Ya desde el principio mismo de la
misión había estado funcionando erráticamente, apagándose sin motivo y
encendiéndose usando los programas de a bordo, provocando incluso algún modo
seguro, achacado en ese momento a Autonav. Al carecer de esta herramienta, la
sonda desactivó los sistemas no esenciales y gestionó su orientación mediante
el sensor solar, a la espera de ayuda del control de misión. Esta avería además
provocó que la antena de alta ganancia no pudiera ser apuntada hacia la Tierra,
por lo que tuvo que recurrir a las de baja ganancia durante largo tiempo. Tras
largos esfuerzos, consiguieron restablecer la comunicación a través de la
antena principal (14 de enero del 2000) y comprender por completo la situación.
Efectivamente, el escáner estelar se había averiado, y no pudo recuperarse.
Esto era preocupante, ya que, en una misión como esta, se podría esperar un
fallo en alguno de los sistemas nuevos, pero no, el que se estropeó era uno de
los componentes estándar, y por lo tanto considerado fiable. El escáner estelar
era una cámara con un grandísimo campo de visión que adquiría imágenes del
fondo estelar para detectar las estrellas y compararlas con el catálogo de a
bordo. Sin éste sistema, la navegación era imposible, y podría condenar la
misión.
Esto no amilanó a los ingenieros del proyecto. Como disponía todavía
de MICAS, se desarrolló un software para que esta cámara cumpliera las
funciones del escáner estelar, a pesar de que el campo de visión era menor del
1% que el del sistema que sustituiría y con un ratio de transmisión cien veces
menor, aunque con una mayor sensibilidad. Después de varios meses de complicado
desarrollo, el programa se envió, y así la sonda volvió a recuperar el control sobre
su actitud, y el motor iónico reanudó su funcionamiento el 28 de junio. Eso sí,
el daño estaba hecho: al haber detenido durante 7 meses la impulsión del motor
iónico, la ventana de tiempo para alcanzar el Wilson-Harrington se perdió, por
lo que dirigieron a Deep Space 1, con
MICAS como escáner estelar, directamente hacia el cometa Borrelly. Otra
consecuencia del nuevo software fue que AutoNav no pudiera controlar más a la
sonda, aunque ésta pudo conservar cierta autonomía en su orientación. El resto
de la tarea de navegación corrió a cargo del escaso personal del centro de
control.
En esencia, la secuencia del encuentro con el cometa era idéntica a la
seguida con Braille, aunque tuvieron que tener en cuenta que la sonda carecía
de protección contra las partículas cometarias (y además, el hardware estaba
situado en el exterior), por lo que la distancia sobre su nuevo destino tendría
que ser mayor por obligación. También por obligación el encuentro tenía que
realizarse de manera autónoma, por dos motivos. Primero, el escaso personal de
control imposibilitaba la capacidad de reacción necesaria que existía en otros
proyectos. Y segundo, debido a la complejidad de las maniobras, y con el triple
propósito asumido por MICAS, tendrían que completar un nuevo software para que
la sonda pudiera cumplir el programa científico, y a la vez, mantener la orientación.
Es decir, había que usar la cámara para seguimiento estelar, luego configurarla
para la adquisición de secuencias de navegación, y por último, para la
recolección de instantáneas y datos científicos de interés. Todo un reto para
la misión y la programación. Para lograrlo, modificaron el funcionamiento de
RSEN, la Navegación de Encuentro de Estado Reducido, la parte de AutoNav para
autoseguimiento en los acercamientos a cuerpos celestes, para que actualizara
la distancia sobre el cometa y usarlo como base para controlar la actitud. De
esta manera, con una serie de comandos, se ejecutarían las secuencias del
encuentro en cascada, de manera que Deep
Space 1 manejara ella sola todo el proceso. Aún así, el encuentro era harto
arriesgado.
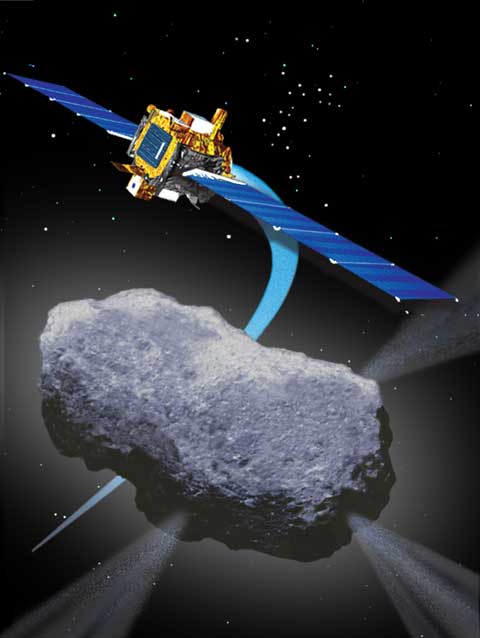
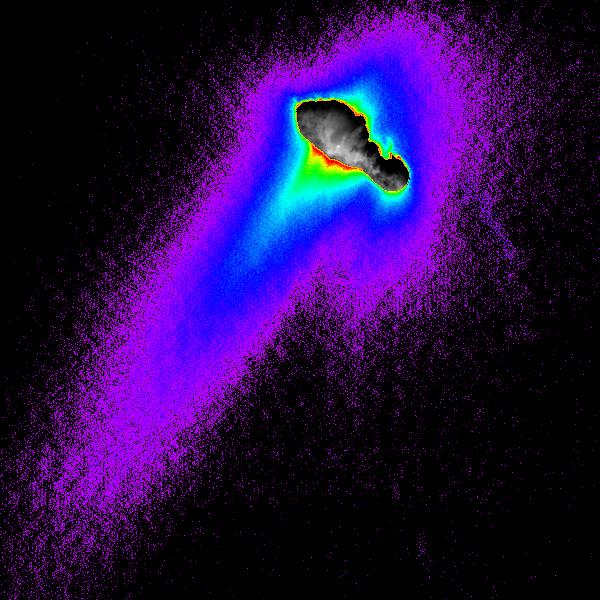
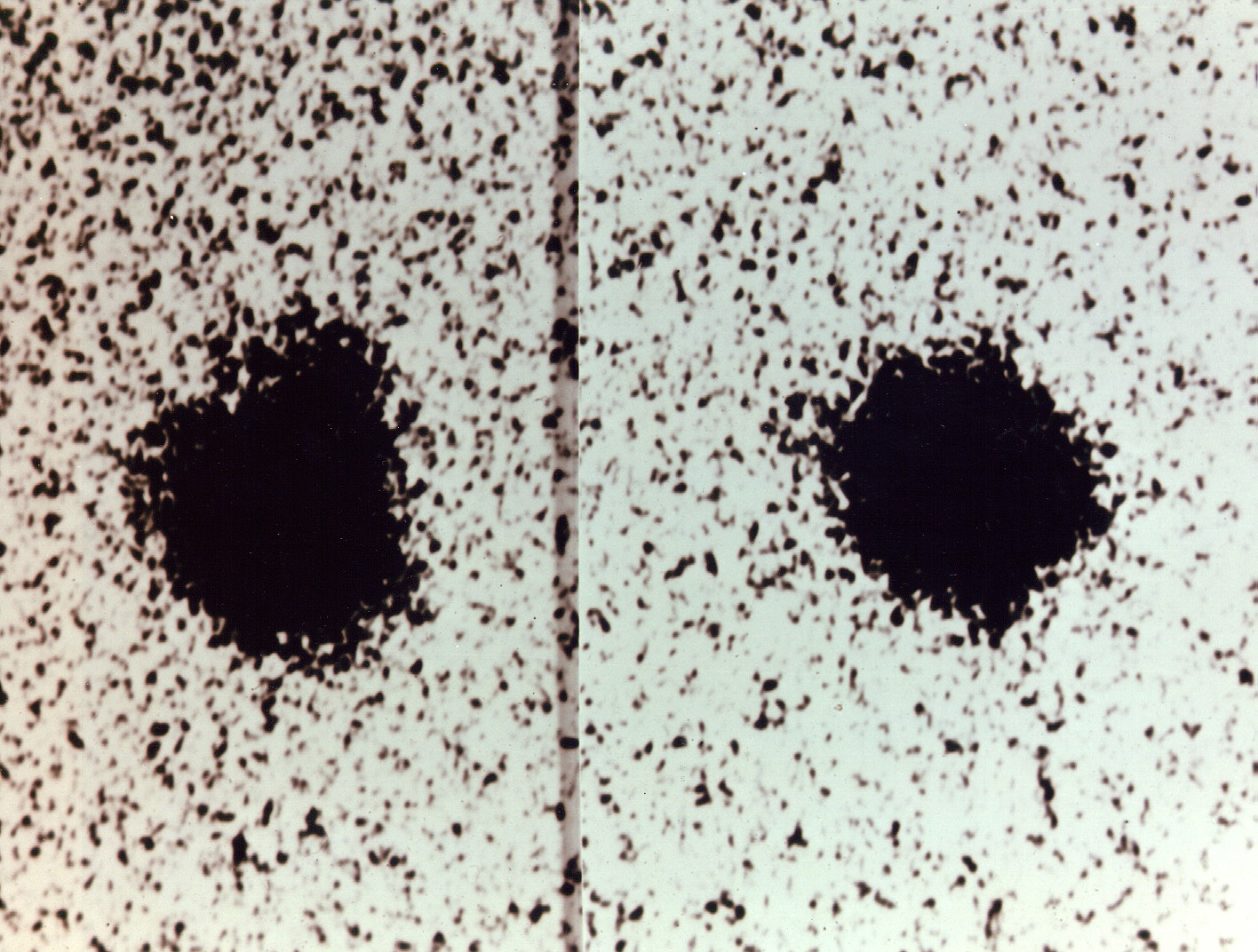
El motor iónico llevó a
Deep
Space 1 hasta el cometa Borrelly el 22 de septiembre del 2001, y se
completó el primer sobrevuelo de un cuerpo celeste de este tipo desde 1992,
cuando la europea
Giotto pasó cerca
del Grigg-Skjellerup. Gracias a toda la preparación realizada en Tierra, y al
uso de la programación, la sonda pasó a 2.171 km. del cometa, devolviendo
imágenes impactantes (mejores a las esperadas), las mejores de un núcleo
cometario tomadas hasta ese momento, añadiendo a esto datos espectrales en
infrarrojo, y sobre todo los interesantísimos datos proporcionados por PEPE,
que nos contó que el plasma en torno del cometa se desviaba asimétricamente por
los chorros de materia del núcleo. Tras alejarse del cometa, regresó a la fase
de prueba tecnológica.
Llamada misión hiperextendida, y debido a la falta de destinos
científicos, se decidió volver a probar al menos 9 de las doce novedades que
cargó. De esta manera, el motor iónico, el espectrómetro PEPE, el amplificador
en banda-Ka, los paneles solares, la estructura multfuncional y los otros dos
de microelectrónicas fueron objeto de nuevos experimentos, a veces similares, a
veces distintos, para comprobar los efectos a largo plazo del ambiente espacial
sobre ellos. Huelga decir que pasaron la prueba con nota altísima otra vez.
A causa del fallo del escáner estelar, el combustible químico de los
propulsores de maniobra había sido usado con una alta tasa de consumo para
poder apuntar la antena principal hacia la Tierra (en septiembre del año 2000
apenas quedaban 9 kg.), y antes de encontrarse con Borrely existió la
posibilidad que éste se acabara antes de llegar. Por suerte no fue así, aunque
esto precipitó la decisión de dar por finalizada la misión el 18 de diciembre.
A pesar de que aún quedaba un 10% del xenón cargado inicialmente en la sonda, y
el motor iónico podía encargarse de las funciones de control de actitud, el
completo consumo de la hidracina de los propulsores llevó a considerar la
misión por concluida. Aún así, tras apagar el motor iónico y la mayoría de los
sistemas, el receptor de la sonda y la baliza de monitorización quedaron activos,
en el caso de que alguien en el futuro solicitara su uso.
De todas las tecnologías que este brillante demostrador tecnológico
probó, sin duda la más exitosa fue el motor iónico. Acumuló durante su misión
678 días de funcionamiento, muy por encima de lo proyectado inicialmente,
llevando a Deep Space 1 a dos cuerpos
menores del sistema solar. Los paneles solares concentradores también
cumplieron su tarea con mucha dignidad, proporcionando toda la energía
necesaria para que cumpliera todos sus objetivos. AutoNav también se consideró
un éxito, eliminando de sus tareas a los navegadores, sobre todo durante los
acercamientos a objetos tan pequeños. La baliza de monitorización también operó
como de ella se esperaba, al igual que el RAX. El pequeño transpondedor también
se desenvolvió con soltura, demostrando que con pequeños elementos el
rendimiento puede ser el mismo. El amplificador en banda-Ka dio resultados tan
positivos que un nuevo tipo de este sistema fue incorporado a la potentísima
sonda marciana Mars Reconnaissance
Orbiter. Y en cuanto a los instrumentos, MICAS funcionó bien, a pesar de la
sobrecarga de tareas a la que se vio sometido y también a pesar del problema
del sensor ultravioleta. Sin embargo, la sorpresa de la misión fue PEPE.
Funcionó tan bien que nos devolvió datos de una calidad sin precedentes, y
además demostró una versatilidad asombrosa. Y más importante aún: demostró que
el motor iónico tenía un efecto nulo tanto sobre la sonda como en el viento
solar.
Esta ha sido la última misión pionera de la NASA, y proporcionó nuevos
conocimientos sobre la operación de vehículos espaciales (principalmente
información importantísima para diseñar mejores trayectorias de aproximación a
cometas, además de actualizar los protocolos de seguridad durante estos
encuentros), así de cómo resolver problemas que podrían acabar con una misión.
Sus tecnologías se demostraron como viables y, tras sucesivas mejoras,
susceptibles a ser incorporadas a nuevas sondas. Sin embargo, el fracaso de los
penetradores de la misión Deep Space 2
a Marte, el cambio de administración en la agencia y la reformulación de los
objetivos futuros provocó la reducción de actividad del programa New Millenium,
y en el 2008, su completa cancelación. Una gran pérdida para los avances
tecnológicos.
Pero, ¿y de las tecnologías que Deep
Space 1 probó y validó para su uso en el espacio? Destinos dispares. RAX
fue fraccionado. Así, el programa de planificación EUROPA fue usado por los
controladores en Tierra de los MER marcianos como herramienta de planificación
de actividades, proporcionando una actualización llamada EUROPA II que fue
usada para un uso idéntico en Phoenix
y Curiosity. El sistema de
autodiagnóstico Livingstone recibió una actualización (Livingstone2) y fue
incorporado al satélite Earth Observing-1
a modo de experimento. La baliza de monitorización fue actualizada, y colocada
en la sonda New Horizons hacia
Plutón, reduciendo significativamente el personal de control y el tiempo de
utilización de las antenas de la NASA, y por lo tanto, su coste total, debido
al tiempo de crucero tan largo que tiene y tendrá que soportar hasta llegar a
su destino (nada menos que 10 años). SDST, el pequeño transpondedor, pasó la
prueba, y las misiones posteriores, como Mars
Odyssey, equipan modelos mejorados de este extraordinario aparato. AutoNav
ha sido usado posteriormente tras la misión Deep
Space 1. Primero, la sonda cometaria Stardust
utilizó la variante de este programa desarrollada tras la pérdida del
escáner estelar para su sobrevuelo sobre Borrely en los encuentros con los
cometas Wild 2 en el 2004 y Tempel 1 en el 2011, y más tarde, una versión completa
y mejorada del que montaba el demostrador tecnológico fue incorporada en la
misión, también cometaria, Deep Impact.
Por su parte, PEPE fue utilizado como base para dar forma al sensor IES, que
forma parte del paquete instrumental RPC de la sonda cometaria europea Rosetta. Y por último, el motor iónico NSTAR es parte
indispensable para que la sonda Dawn
cumpla su tarea de explorar los dos mayores objetos del cinturón de asteroides
principal, Vesta y Ceres. Por suerte, parte de lo probado no cayó en saco roto.






.jpg)

 Deep Space 1, vista por
primera vez, no se diferenciaba de otras anteriormente diseñadas por la
agencia. El bus de la sonda era de forma octogonal, fabricado en aluminio, con unas medidas de 1.5 metros de alto, 1.1 de ancho y 1.1 de fondo (una vez colocadas las mantas de protección térmica, el módulo de propulsión de forma cilíndrica y las electrónicas, las medidas eran 2.5 x 1.7 x 2.1), los paneles solares nacían de cada lado, alimentando a una batería de níquel hidrógeno, colocada en la denominada cara solar (llamada así obviamente porque era el lado que ofrecía al Sol). La mayoría del hardware de la nave estaba colocado en la parte exterior, para un más fácil acceso para los técnicos en las fases de montaje y pruebas, mientras que los tanques de combustible estaban montados en su interior. Estaba estabilizada en sus tres ejes, utilizando como sistema de control de actitud un sensor solar (en la cara solar), un escáner estelar, un grupo de propulsores químicos (cuyas electrónicas de gestión eran partes dejadas de la misión Pathfinder) y una unidad
de medición inercial. Para comunicarse con el centro de control portaba tres
tipos de antenas. La de alta ganancia era un repuesto dejado de la construcción
de Mars Pathfinder, formada por un
pequeño disco de 30 centímetros, fijado mediante unos soportes a un lateral de
la parte superior de la estructura de la sonda en la cara solar, y
proporcionaba el enlace principal de comunicaciones con Tierra. Para las fases
iniciales de crucero y/o casos de modo seguro, montó tres antenas de baja
ganancia omnidireccionales, también repuestos dejados por Pathfinder. Dos de ellas fueron montadas al lado de la de alta
ganancia, con una mirando hacia delante y otra en dirección solar, mientras que
la tercera estaba montada en la parte inferior, mirando hacia atrás. La tercera
antena era parte de uno de los experimentos tecnológicos a realizar. El
ordenador de a bordo también estaba elaborado con partes de repuesto del
aterrizador marciano, y alojado en una unidad de electrónica integrada, situada en el lado
Deep Space 1, vista por
primera vez, no se diferenciaba de otras anteriormente diseñadas por la
agencia. El bus de la sonda era de forma octogonal, fabricado en aluminio, con unas medidas de 1.5 metros de alto, 1.1 de ancho y 1.1 de fondo (una vez colocadas las mantas de protección térmica, el módulo de propulsión de forma cilíndrica y las electrónicas, las medidas eran 2.5 x 1.7 x 2.1), los paneles solares nacían de cada lado, alimentando a una batería de níquel hidrógeno, colocada en la denominada cara solar (llamada así obviamente porque era el lado que ofrecía al Sol). La mayoría del hardware de la nave estaba colocado en la parte exterior, para un más fácil acceso para los técnicos en las fases de montaje y pruebas, mientras que los tanques de combustible estaban montados en su interior. Estaba estabilizada en sus tres ejes, utilizando como sistema de control de actitud un sensor solar (en la cara solar), un escáner estelar, un grupo de propulsores químicos (cuyas electrónicas de gestión eran partes dejadas de la misión Pathfinder) y una unidad
de medición inercial. Para comunicarse con el centro de control portaba tres
tipos de antenas. La de alta ganancia era un repuesto dejado de la construcción
de Mars Pathfinder, formada por un
pequeño disco de 30 centímetros, fijado mediante unos soportes a un lateral de
la parte superior de la estructura de la sonda en la cara solar, y
proporcionaba el enlace principal de comunicaciones con Tierra. Para las fases
iniciales de crucero y/o casos de modo seguro, montó tres antenas de baja
ganancia omnidireccionales, también repuestos dejados por Pathfinder. Dos de ellas fueron montadas al lado de la de alta
ganancia, con una mirando hacia delante y otra en dirección solar, mientras que
la tercera estaba montada en la parte inferior, mirando hacia atrás. La tercera
antena era parte de uno de los experimentos tecnológicos a realizar. El
ordenador de a bordo también estaba elaborado con partes de repuesto del
aterrizador marciano, y alojado en una unidad de electrónica integrada, situada en el lado 










.jpg)



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}