Hace mucho tiempo, el Japón envió al espacio un halcón peregrino, con
una misión importante: coger un pequeño pedazo de roca espacial y traerlo a
casa. Fueron muchos los avatares que sufrió desde el principio de la misión
hasta casi el final, pero finalmente, cumplió lo prometido. Estamos hablando de
la misión Hayabusa, y su turbulenta
visita al asteroide Itokawa. Fueron apenas unos granos de polvo, pero aún con
eso ha proporcionado información muy interesante sobre la vida de un asteroide,
en especial, uno tipo S, o silicatado. Como misión doble (no

solo científica,
también de demostración tecnológica) mucho dependía de que diversos elementos
funcionaran bien, pero en algunos casos, no fue así. Los objetivos tecnológicos
se cumplieron, pero la gente de la misión se quedó con un regusto amargo. Por ello,
se dirigieron a la dirección de JAXA para que les permitieran realizar una
segunda misión básicamente idéntica. En el año 2009 se dio el visto bueno, y
ahora está en las proximidades de su objetivo.

La génesis de Hayabusa2 fue
partiendo de la necesidad de comparar los resultados obtenidos por la sonda
original con los de un asteroide de características distintas. Además, los
múltiples fallos en Hayabusa (tanto
propios como ajenos) han motivado la repetición y mejora de algunos de los
sistemas de a bordo, además de añadir nuevas prestaciones, algunas innovadoras
para una sonda japonesa. La intención: remediar aquello que falló, y probar
nuevas cosas en un paquete de tamaño reducido. Hayabusa fue, tras Deep Space
1, la segunda sonda en usar en el espacio profundo la impulsión iónica, lo
que le permitió alcanzar su objetivo, aún con retrasos provocados por las
averías, y regresar a casa allí donde otra misión, más convencional, no hubiera
podido.

¿Por qué investigar los asteroides? Se trata de uno de los dos tipos
de fósiles cósmicos que hay en el espacio, junto a los cometas. Los asteroides
son los escombros que quedaron de la obra general, los planetas y sus
satélites, y los hay, como ya contamos, de muy diversos tipos. Cada uno cuenta
una historia sobre las primeras etapas del sistema solar, y sondas bien
equipadas son capaces de relatar esa historia. Sin embargo, estudiar los
asteroides en laboratorios terrestres proporcionará mucha más información que
la instrumentación que puede encajarse en una sonda espacial, cuya masa depende
del cohete que la debe lanzar al espacio. En concreto, el objetivo para Hayabusa2 es un asteroide NEO, uno de
los cercanos a la Tierra que, como se recordará, en términos energéticos, son
más económicos de alcanzar que la misma Luna. Hay muchos allí arriba, y cada
poco tiempo aparecen más. Los peligrosos no son los que vemos, sino los que
todavía no hemos encontrado, y su estudio podría ayudar a estrategias para
desviarlos. Cuantos más estudiemos, más sabremos de ellos, del origen del
sistema solar, y de las mejores formas de desviarlos del camino.

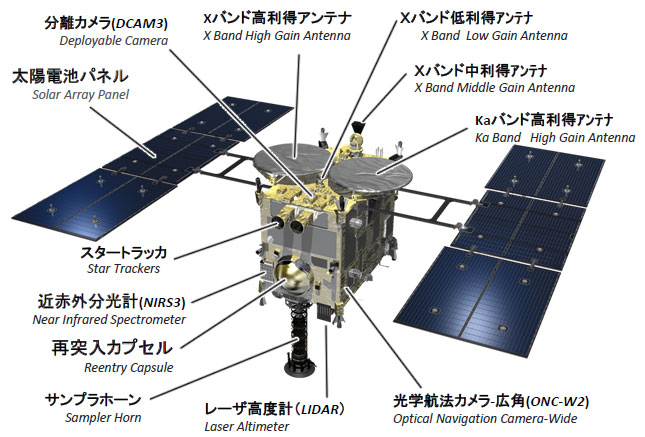
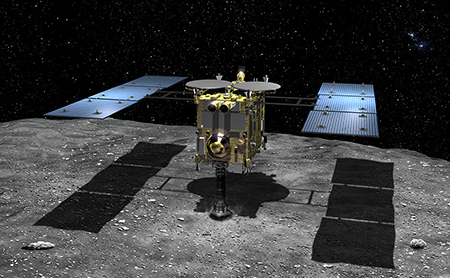
Exteriormente, las diferencias entre
Hayabusa2 y su antecesora son escasas. La plataforma de la sonda, elaborada
usando aluminio y materiales compuestos ligeros, mide 1.6 x 1 x 1.2 metros, y
plenamente desplegada en el
espacio,
su envergadura llega a los seis metros. Este rectángulo tiene soportes en todas
sus caras: en la superior, las antenas de comunicaciones y los soportes de los
paneles solares, en la inferior, la instrumentación, en la frontal, los
escáneres estelares y la cápsula de muestras, en la trasera, el conjunto de
motores iónicos, y en una de las laterales, un pequeño añadido. Toda la sonda
es gestionada por un ordenador de a bordo, operado por una unidad de procesado
central COSMO 16, que realiza todas las operaciones de a bordo, y almacena toda
la información generada a bordo en un grabador de datos de estado sólido de 1
GB de capacidad. La mayor novedad tecnológica de la sonda es su sistema de
comunicaciones dual. El sistema primario usa banda-X, usando una antena de alta
ganancia, una antena de media ganancia tipo cuerno, móvil en dos ejes, y tres
antenas de baja ganancia. El segundo sistema emplea banda-Ka, y una antena de
alta ganancia propia. Estas

dos antenas están una junto a la otra, y son discos
planos, similares a la antena de alta ganancia de Akatsuki. Mientras el de banda-X sirve para comunicaciones
bidireccionales, el de banda-Ka es exclusivamente para transmitir datos a alta
velocidad, y para usarlo como referencia de navegación durante el crucero a su
objetivo. Su control de actitud es el habitual en este tipo de misiones: dos
unidades de medición inercial, dos escáneres estelares y cuatro sensores
solares, además de un conjunto de cuatro ruedas de reacción (una de más con
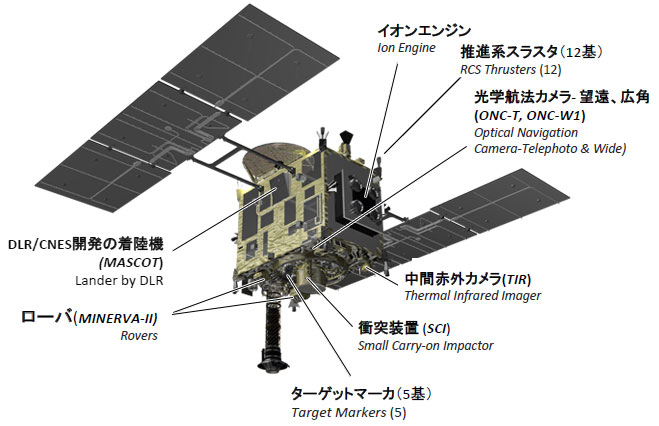
respecto a la misión original). En cuanto a su propulsión, equipa dos sistemas.
Un conjunto de propulsores químicos usa hidracina como combustible y tetróxido
de nitrógeno como oxidante. Son en total 12 propulsores, para correcciones de
rumbo y la desaturación de las ruedas de reacción. Pero lo importante es el Sistema
de Motor Iónico. En general, es similar en funcionamiento al del sistema NSTAR
de Deep Space 1 y Dawn, pero hay una gran diferencia. En vez
de usar cátodo con el que inyectar electrones, emplea un sistema de microondas
para hacer lo mismo, tanto en la cámara de descarga como en el neutralizador,
reduciendo con ello la masa del sistema en general. Se le conoce como m10, y dispone de una tobera de 10
centímetros de diámetro. Lo interesante de todo el sistema es que equipa cuatro
motores, y estos cuatro están situados en un único montaje que permite mover
todo el complejo para apuntar los motores iónicos en la dirección

deseada. Además,
conserva una cualidad muy curiosa que fue lo que salvó a la sonda original:
aunque cada motor tiene sistemas propios e independientes (almacenamiento de
combustible, cámara de conversión, rejillas de aceleración, neutralizador),
buena parte de estos componentes se han diseñado para que, en caso de avería de
uno de ellos, cualquier otro motor pueda usar los otros elementos funcionales. Como
ejemplo, para su regreso a la Tierra, Hayabusa
usó el combustible de un motor en otro, y empleando el neutralizador de otro. Los
de Hayabusa2 son sistemas mejorados,
ya que mientras la misión original tuvo motores que entregaron hasta 7
milinewtons, los de Hayabusa2
alcanzan los 10. Pero este sistema se ha diseñado para que varios motores
funcionen en conjunto, hasta tres a un tiempo, al tiempo que se mantiene el
cuarto en reserva. Por ello, en total, la potencia combinada máxima será de 30 milinewtons.
Los paneles solares son de alta eficiencia por necesidad de los motores
iónicos. Son 12 metros cuadrados de superficie activa que, a distancia
Tierra-Sol, generan 2600 vatios, alimentando los sistemas de a bordo (el
sistema iónico necesita hasta 1200) y cargando una batería de ión litio. En cuanto
al control termal, nada extraordinario: mantas multicapa, radiadores y
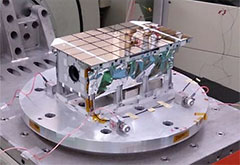
calentadores eléctricos. La instrumentación está compuesta de diversos
aparatos: instrumentos de escaneo remoto, los dispositivos de recogida de muestras,
y hasta cinco minivehículos desplegables. Uno

de los sistemas principales es el
ONC, las Cámaras Ópticas de Navegación. Son tres en total, una telescópica (ONC-T)
y dos de campo ancho (ONC-W1 y W2). ONC-T es un sistema que dispone de un
telescopio refractor de 100 mm. de longitud focal, acoplado a un sensor CCD de
1024 x 1024 pixels. Además de servir para la navegación óptica para llegar a su
destino, se usará para estudiar en alta resolución y en distintos colores la
superficie del asteroide, ya que emplea una rueda de filtros de ocho
posiciones, con estas longitudes de onda: 390, 480, 550, 700, 860, 950, 589.5
nm, y uno de banda ancha para la navegación óptica. En cuanto a las dos ONC-W,
son cámaras monocromáticas (entre 485 y 665 nm) de campo ancho que usan
sensores

CCD idénticos, que observarán el asteroide de manera global al
principio, y luego para examinar las distintas secciones del asteroide en las que
buscar zonas interesantes. Su colocación en la sonda es curiosa: mientras que
ONC-T y ONC-W1 están coalineados en la plataforma inferior, ONC-W2 está situada
en uno de los laterales, proporcionando un ángulo de visión inclinado, muy
curioso. Todo este sistema, derivado del AMICA de Hayabusa, en el asteroide objetivo cumplirá un programa muy importante,
estudiando la geografía, la geología, y buscará zonas en las que poder tomar
las muestras, así como seleccionar zonas para el aterrizaje de los distintos
complementos que mandará allí. La resolución de ONC-T, a 10 km. del asteroide,
será de un metro, mientras que a la misma distancia, las ONC-W será de 10
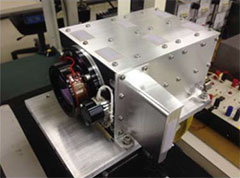
metros. También con un propósito dual es el LIDAR, el sistema láser para
medición de distancia entre Hayabusa2
y su destino. Incorpora un

telescopio receptor tipo Cassegrain con una apertura
de 127 mm., y un emisor láser emitiendo en 1064 nm, emitiendo pulsos a un ritmo
de hasta uno por segundo. El sistema es efectivo ya desde los 2000 km., para de
esta forma saber que está en rumbo en caso de recibir el pulso de retorno. Una vez
situado a una distancia de 20 km., su huella en el asteroide será de 20 metros
de diámetro. Durante el tiempo que dure el examen alrededor del asteroide, no
solo servirá para construir un modelo tridimensional y un mapa topográfico,
también para mantenerse a la distancia programada de manera autónoma, sirviendo
así de referencia de navegación. Para distancias inferiores a los 30 metros de
altitud, entonces usará un segundo juego óptico para navegación precisa. También
cumplirá una tercera función, la de detectar si existe algo así como una nube
de polvo envolviendo el asteroide. Como parte del sistema, posee hasta cinco
marcadores de objetivos que se lanzarán a la superficie para servir de
referencia, tanto para el LIDAR como para las

cámaras. NIRS3, el Espectrómetro
de infraRojo Cercano a 3 micrones, se encargará de indagar la composición
asteroidal. Cuenta con un sistema óptico de siete lentes de silicio-germanio
detrás de la apertura y un potente bafle, una abertura que define el campo de
visión, y una rejilla, junto con el conjunto detector, un sensor de conjunto de
fotodiodos de 128 pixels a base de indio-arseniuro. El sistema es sensible en
la gama infrarroja entre los 1.8 y los 3.2 micrones, en la que se encuentran
algunos materiales interesantes, incluyendo hielo de agua, en caso de existir. La
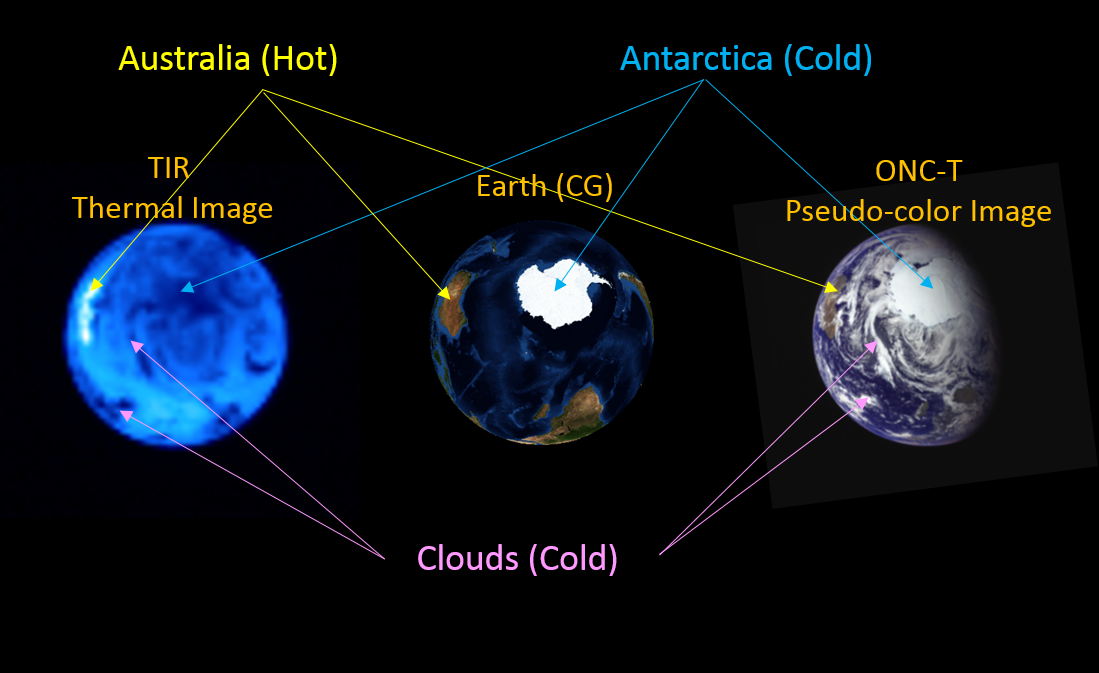
novedad a bordo es TIR, la cámara de Infrarrojo Termal. Es prácticamente una
réplica del sistema LIR de Akatsuki, de
manera que en lo básico no hay

diferencias. Es un sistema que cuenta con tres
lentes de germanio, un obturador mecánico, y un conjunto de microbolómetros (no
necesita refrigeración activa). El filtro que define el rango de longitudes de
onda a la que es sensible se sitúa en la apertura, registrando el infrarrojo
termal entre los 8 y los 12 micrones. El área activa del detector cubre 328 x 248
pixels. Su misión, tomar la temperatura del asteroide, buscando zonas con más
inercia termal (menos rocas) o menos (más rocosa), obteniendo con ello
información sobre las propiedades de la superficie del asteroide, ayudando así
a la selección de las zonas a muestrear. El sistema de recogida de muestras es
una réplica casi exacta del que montó la sonda original. Se trata de un largo
tubo, en cuyo interior, hay una serie de bolas que deben lanzarse a alta
velocidad hacia la superficie. La idea es posar el final del tubo (que es
desplegable) en la superficie, y allí, disparar la bola. La fuerza del impacto,
y la débil gravedad del asteroide, harán que el polvo levantado suba por el
tubo, hasta llegar al contenedor

de muestras, situado en la cápsula de retorno
de muestras. El tubo, una vez desplegado, mide un metro, y su diámetro interno
es de 20 cm. Una vez en superficie, una secuencia automatizada disparará el
proyectil, elaborado en Tántalo, de 10 mm. y 5 gramos de masa, usando un
cartucho de pólvora, a una velocidad de 300 metros por segundo. Con las
partículas ascendiendo, se encontrarán con un pequeño cuerno que las guiarán a
un ángulo de 90º y así llegar al contenedor. En caso de no funcionar los
sistemas de disparo, en el punto de contacto con el suelo hay una suerte de
pala que podría retener algo de material y, después de ascender, los
propulsores detendrían el ascenso, pero la inercia permitiría a este material
ascender por el tubo hasta llegar al contenedor. La otra parte importante es la
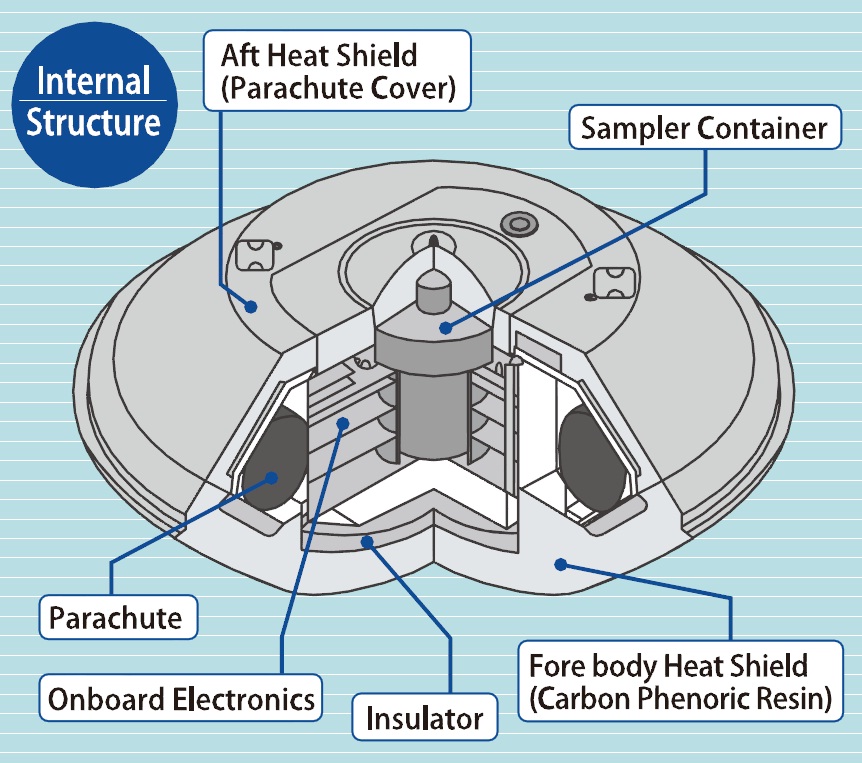
propia cápsula de retorno de muestras. Con

40 centímetros de diámetro y 20 de
alto, pesa 16.5 kg. Incorpora las dos mitades, el escudo de reentrada y la
parte trasera, y un contenedor interno, en cuyo interior están los tres
contenedores de muestras, que se mantiene completamente cerrado y protegido por
un sello de aluminio. Todo el sistema cuenta con electrónicas, batería, una
baliza y un paracaídas. De hecho, las dos mitades externas, recubiertas con
material ablativo para la reentrada, se separarán a mitad del descenso,
aligerando el conjunto y protegiendo completamente las muestras. Además, cuenta
con un sistema que registrará las condiciones de la reentrada y del descenso,
usando un acelerómetro triaxial, un
sensor de ratio y hasta 13 sensores de temperatura. Junto con esto, empleará un
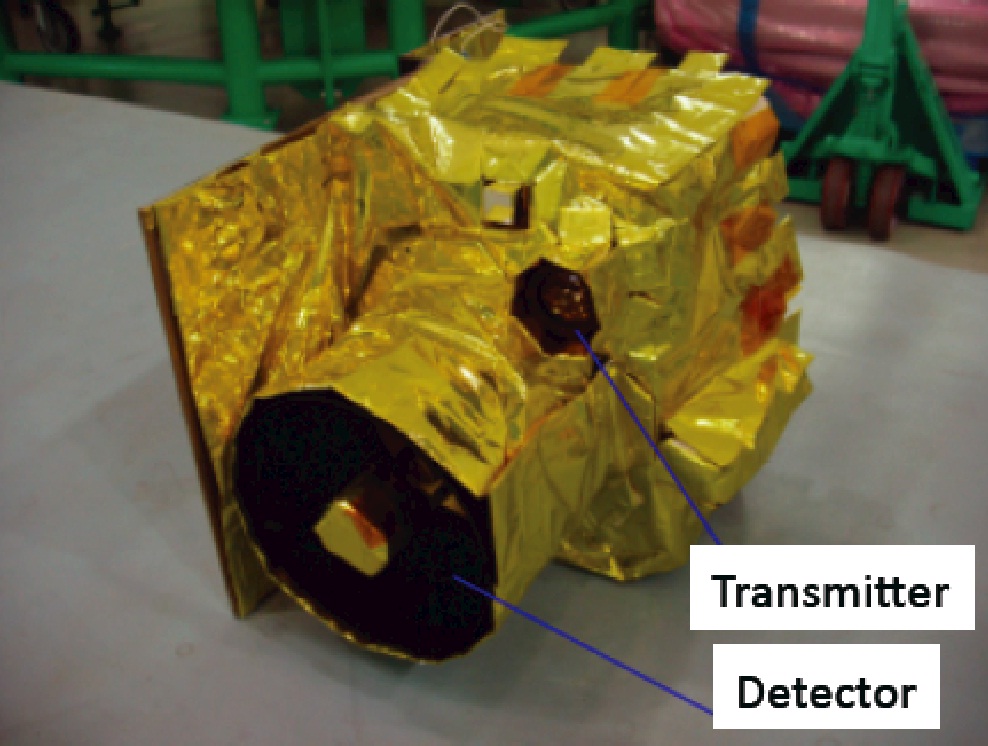
nuevo experimento para estudiar bajo la superficie de su asteroide. El denominado
conjunto SCI y DCAM3 realizarán una misión casi análoga a la realizada por

Deep Impact en el cometa Tempel 1. SCI,
el Pequeño Impactador Transportado, es un pequeño sistema que será liberado
cerca del asteroide, activando una secuencia de eventos durante los cuales un
potente explosivo proyectará un impactador de cobre de 30 cm. de diámetro y dos kg. de masa a una velocidad de 2 km/s para
su impacto con la superficie asteroidal, generando una nube de escombros y
desenterrando las capas internas del asteroide para una potencial recogida de

muestras. En cuanto a DCAM3, es una pequeña cámara desplegable que se liberará
también al poco de separar el SCI. Estabilizado por rotación a 100 rpm, cuenta
con dos cámaras, una de ellas científica, y un par de antenas, y registrará
todo el procedimiento de impacto con el asteroide, hasta que la batería se agote.
Pero aquí no se acaba todo. Cuenta con un total de cuatro minivehículos que
liberará hacia la superficie. El más importante es
MASCOT, el Explorador Móvil de Superficie Asteroidal. Este es un
desarrollo conjunto entre la agencia francesa CNES y la alemana
DLR. Es un
rectángulo de 30 x 30 x 20 cm. y de 11 kg. de masa, y cuenta en su interior con
lo necesario para funcionar. Elaborado mediante paneles de fibra de carbono, y
un mamparo separa las electrónicas de la sección científica. Se alimentará
básicamente mediante batería, y una vez en la

superficie, funcionará un máximo
de 16 horas. Lo interesante es que será capaz de moverse, y para ello empleará
un sistema interno unido a la baja gravedad del asteroide. Para ello usará una
masa suspendida que es golpeada por un brazo de aluminio de 25 milímetros,
acoplado a un motor eléctrico. Cuando el brazo golpee la masa, se creará
inercia, lo que provocará que MASCOT
salte hasta 70 metros del lugar en el que cayó, o rote sobre sí mismo. Entre todo
lo que equipa, está el sistema de comunicaciones. En este caso es de banda-S,
bidireccional, y usa a Hayabusa2 como
intermediario. Aunque el programa de trabajo estará ya insertado en su
ordenador, esta capacidad de recibir se ha instalado en caso de tener que
solucionar problemas, o para responder a lo que vea en la superficie. La distancia
de comunicaciones se extiende entre ambos a 150 km. Su ordenador emplea el ya
casi básico procesador LEON3FT, que gestionará todo lo que ocurra a bordo. A pesar
de sus reducidas dimensiones,

cuenta con cuatro investigaciones. Para empezar,
su cámara, que emplea un sensor CMOS de 1024 x 1024 pixels servido por unas
sencillas ópticas. El sistema está instalado de tal forma que está inclinado
22º con respecto al plano de la superficie, permitiendo no solo ver el suelo,
también el horizonte. Con un enfoque de 150 mm. al infinito, es capaz de ver la
luz en un rango que va de entre los 400 a los 1000 nm, pero va acompañado de un
sistema de luces LED en configuración 4x36 para ver cuatro longitudes de onda
específicas: Azul (470 nm), Verde (530 nm), Rojo (624 nm) e Infrarrojo (805 nm),
y todo en un paquete de solo 403 gramos. El segundo sistema es MicrOmega, un
espectrómetro infrarrojo que se basa en un filtro

sintonizable acusto-óptico y
una potente luz blanca, cuya luz es registrada por un sensor HgCdTe en un rango
de longitudes de onda infrarrojas de entre 0.99 a 3.65 micrones. Para ello, la
bombilla de luz blanca iluminará el suelo (cuya óptica se apoya en él, y está
elaborada en zafiro) y, en esencia, esa luz reflejada por el suelo pasará por
el filtro hasta llegar al sensor. Debido al tipo de sensor, necesita un sistema
de refrigeración, que se encuentra dentro de un contenedor sellado. Su misión,
obtener unas mediciones de composición sin precedentes en un asteroide,
detectando no solo minerales, también distintos hielos así como componentes
orgánicos, si los hubiera. En cierta manera, parte del rango de longitudes de
onda de MicrOmega coincide con el del espectrómetro NIRS3. El tercer aparato es
un magnetómetro. Es difícil medir campos magnéticos en
asteroides, la única que
lo hizo en serio fue NEAR-Shoemaker
en Eros, y no detectó nada de él. Una buena manera de hacerlo es desde la misma
superficie, y por ello MASCOT cuenta
con uno, derivado de los montados en Venus
Express o Rosetta, y no es más
que una unidad de núcleo saturado triaxial, que ya ha demostrado su valía en
otros destinos del sistema solar. Su tarea es saber si el asteroide en el que
aterrice posee o no campo magnético, aunque es bastante poco probable. Y para
terminar, el radiómetro MARA. Complementario al sistema TIR, obtendrá datos de
la inercia termal

registrando, mediante seis termopilas, la radiación termal en
los rangos de 8-14, 5.5-7, 8-9.5, 9.5-11.5 y 13.5-15.5 micrones, además de uno
que irá de los 5 a los 100 micrones. Todos estos canales proporcionarán
información de inercia termal, pero también de composición de diversos
minerales superficiales que aparecen en esos rangos espectrales. Y para
terminar, los otros microvehículos, llamados MINERVA. Dos de ellos serán móviles, y el tercero quedará fijo en
la superficie. Los dos móviles, MINERVA-II-1,
caerán juntos, y se separarán en la superficie, yendo por caminos separados. El
fijo, MINERVA-II-2, simplemente caerá
y se fijará al suelo. a diferencia de MASCOT,
estos tienen paneles solares que recargarán un par de

capacitadores que actuarán
como baterías, funcionando con únicamente dos vatios de electricidad. Todos ellos
disponen de cámaras, fotodiodos y sensores de temperatura, con los que estudiar
mínimamente el suelo del asteroide. Los dos móviles usarán un sistema
relativamente parecido al usado por MASCOT,
contando en este caso con dos motores eléctricos, uno usado para aplicar par, y
el otro para dirigirlo, permitiendo así saltar a distancias notables. Una vez
todo junto, y listo para el lanzamiento, la masa total era de 609 kg, de los
cuales aproximadamente 66 correspondían al combustible de xenón.

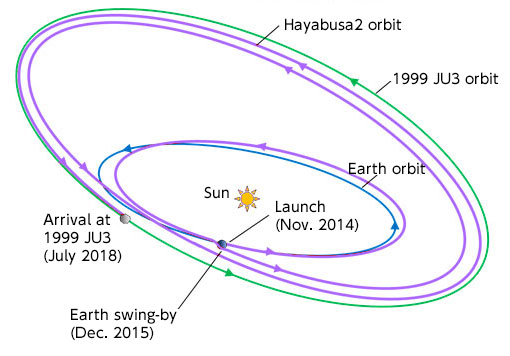
Fue lanzado el 3 de diciembre del 2014 a bordo del más potente cohete
del Japón, el
HII-A, y lo hizo
acompañado de varias cargas útiles distintas, incluyendo la interesante
PROCYON, un pequeño demostrador
tecnológico cuya intención era probar un sistema de propulsión dual basado sólo
en xenón para alimentar un motor iónico y propulsores de gas frío, y para
sobrevolar un asteroide. Una avería en su motor iónico impidió llegar al
asteroide designado, pero el sistema demostró su valía.

El crucero de Hayabusa2 ha
sido muy tranquilo, y el sistema de motores iónico ha funcionado a la
perfección. La sonda usó su impulsión iónica para correcciones de rumbo antes
del sobrevuelo terrestre, ocurrido un año justo después del lanzamiento,
oportunidad aprovechada para demostrar los sistemas ONC y TIR, viendo que los
sistemas funcionaban bien. Tras el sobrevuelo, y hasta la fecha, ha acumulado
tres segmentos de impulsión para llegar a las puertas de su destino. El primero
duró entre el 22 de marzo y el 21 de mayo del 2016, en total 798 horas de

funcionamiento, y acumulando 127 metros por segundo de velocidad. El segundo,
del 22 de noviembre del 2016 al 26 de abril del 2017, 2593 horas de
funcionamiento, añadió 435 m/s, y la tercera y última, del 10 de enero al 3 de
junio de este año, 2475 horas en total, proporcionó 393 m/s más, dejando a la
sonda a algo más de 3000 km. de su asteroide. En todas estas tres operaciones
de impulsión, usó tres de los motores, aunque en ocasiones solo dos, con los
motores A, C y D, dejando el B de reserva. Ahora, hasta llegar al primer punto
de observación, toca navegación óptica.

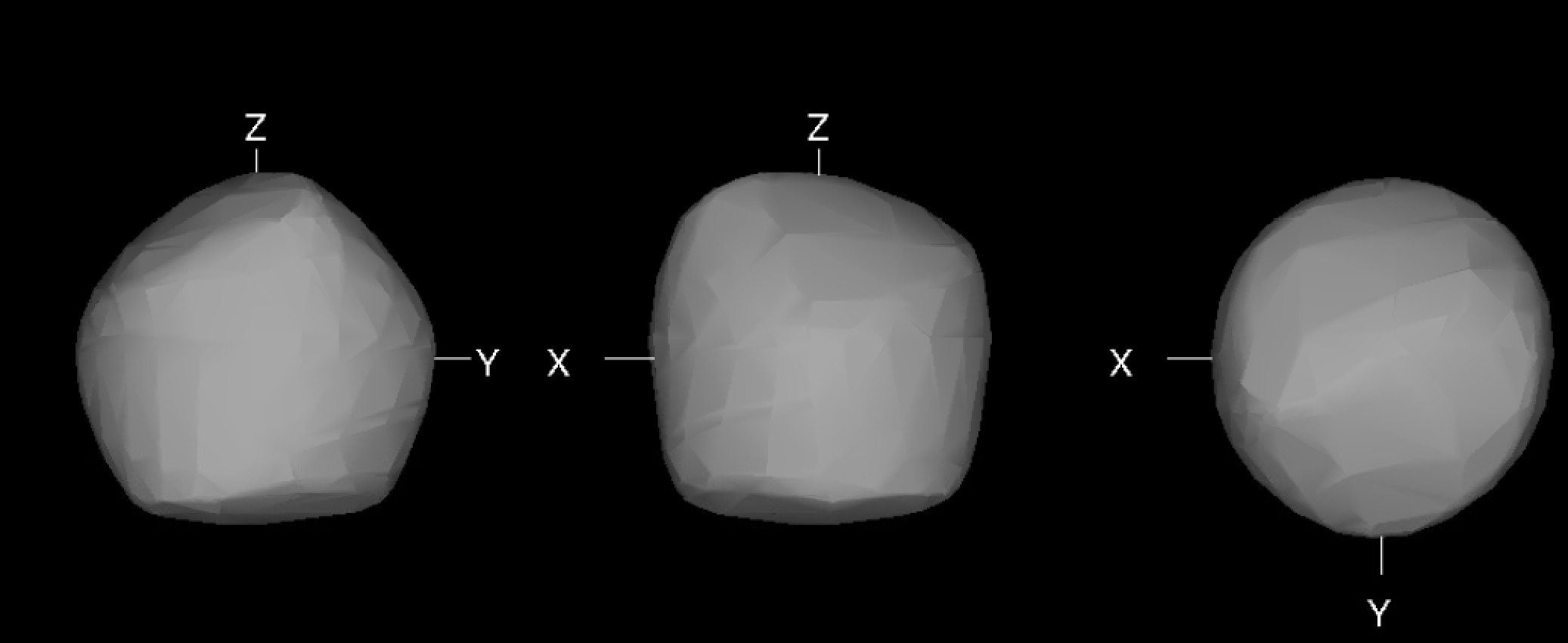
Su destino es el asteroide NEO 162173 Ryugu. Descubierto el 10 de mayo
de 1999 por el proyecto LINEAR, orbita al Sol en 1.3 años, con un perihelio de
0.96 unidades astronómicas y un afelio de 1.4 unidades astronómicas, y una
inclinación sobre la eclíptica de 5.9º. Rota sobre sí mismo en aproximadamente
7 horas y 38 minutos, y de acuerdo con los exámenes realizados (tanto desde
tierra como desde los observatorios Akari
y Spitzer) se trata de un
asteroide tipo C, es decir, carbonáceo, con una forma aproximadamente
redondeada y unos 900 metros de diámetro, y es apenas reflectivo, con un albedo de apenas 0.05. Como Itokawa es
un tipo S, el estudio de Ryugu proporcionará el punto de comparación necesario
entre los dos.

Para llegar a partir de ahora, y hasta el día 27, aproximadamente,
confiará en la navegación óptica y en el seguimiento radiométrico, basado en el
método denominado Delta-DOR, que no solo emplea las emisiones de radio
transmitidas entre las antenas terrestres y la sonda, sino también una emisión
de radio natural, principalmente quásares, una técnica estrenada por Deep Space 1 y desarrollada a partir del
desastre marciano de la NASA de 1999, proporcionando soluciones extremadamente precisas
en cuanto a fijar una sonda en el espacio. Partiendo de su fecha de llegada al
asteroide, serán 18 meses de investigación. La primera altitud será de 20 km.,
para descender primero a 5 km., y luego a 1, obteniendo imágenes y datos de
alta resolución, además de obtener mediciones de gravedad que permitan saber
cómo es por dentro. La primera operación de muestreo podría ocurrir en otoño,
coincidiendo con la liberación de los primeros minivehículos. El resto de
operaciones, más allá de este año y hasta el siguiente, todavía están por
decidir. Pero la fecha fija es la partida, fijada para diciembre del 2019, y
tras un año de crucero de retorno, volver a casa a finales del

2020 para entregar
las muestras recogidas en un área acotada del desierto australiano de Woomera. Tras
su recogida, serán enviadas a Japón, para su conservación, y posterior
distribución a los científicos.
Curiosamente, Hayabusa2 no
es la única misión con el ojo puesto en un asteroide NEO tipo C. OSIRIS-REx, de la NASA, lanzada en septiembre
del 2016, está cerca también de llegar a su destino, el asteroide Bennu. Dada la
similitud entre los dos proyectos, habrá sinergia entre los ambos, compartiendo
datos, personal, y experiencia. Que Hayabusa2
esté llegando antes ayudará a OSIRIS-REx
a identificar su asteroide mediante navegación óptica. Como también posee
sensores similares (OVIRS, parecido a NIRS3, y OTES, similar a TIR) se podrán
comparar las condiciones y composición de dos objetos en apariencia idénticos. Y
lo más importante, con las muestras ya en casa, se podrán comprobar los
parecidos y las diferencias entre ambos cuerpos. Se podría decir que son
misiones redundantes, pero como no hay dos personas iguales, tampoco hay dos
asteroides iguales. Será muy interesante lo que estos dos proyectos nos
entregarán.