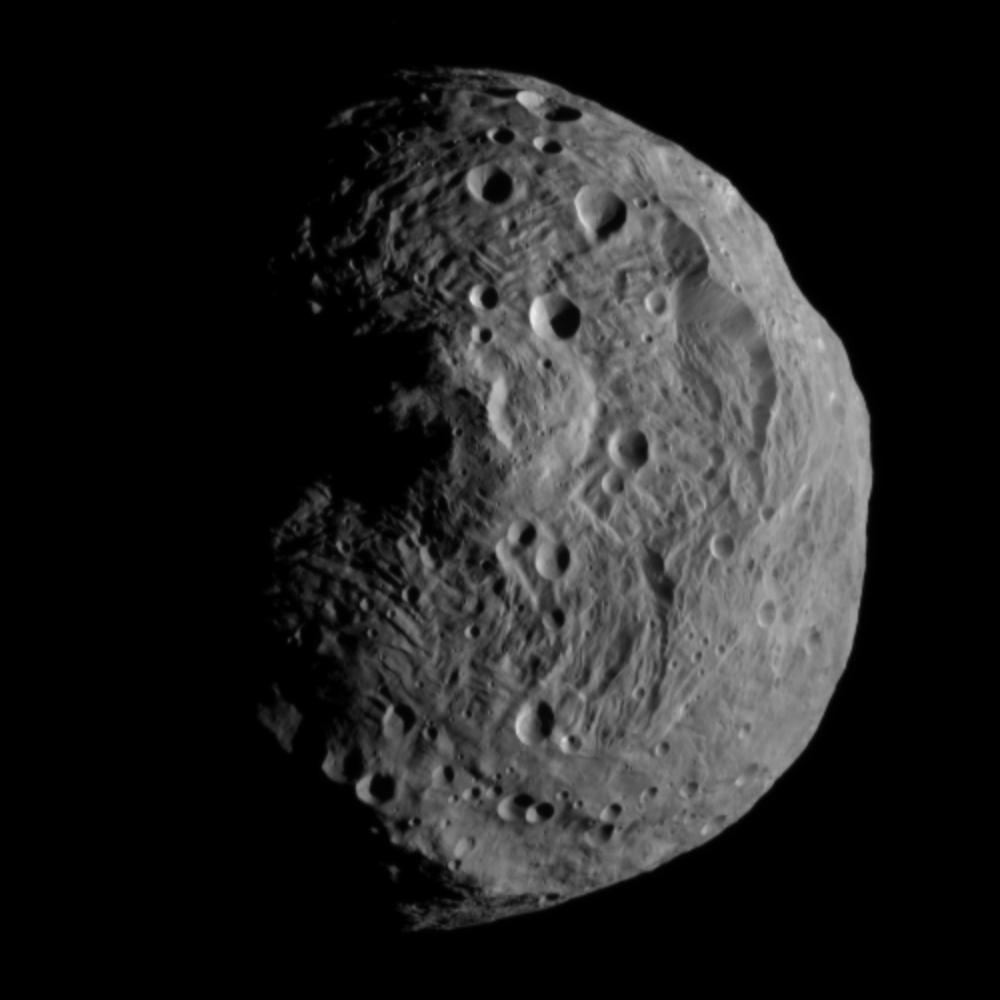
El asteroide 4 Vesta, desde Dawn

Phoenix, un tributo
sábado, 31 de diciembre de 2016
Resumen del año 2016
En fin, se acaba el año y toca resumir. Si un acontecimiento ha
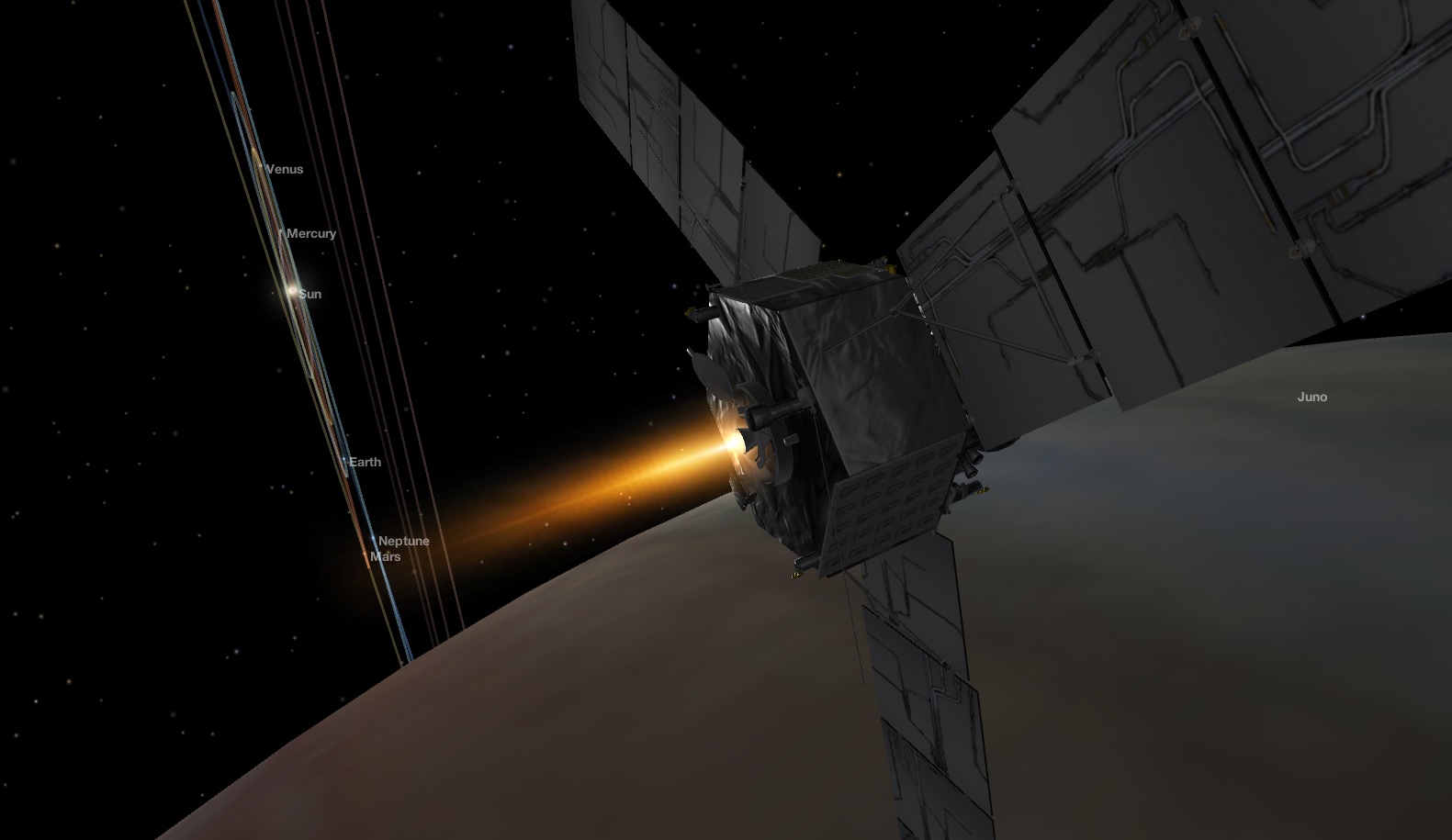
marcado el 2016 es el retorno al hermano mayor del sistema, Júpiter. Así es, ya
que el 4 de julio la bella dama del espacio, la sonda Juno, entró en su órbita para una misión que nos llevará a intentar
entender al mayor planeta del sistema solar por dentro, cómo funciona, y como
afecta al entorno que le rodea. Todo hay que decirlo, tras esta llegada
exitosa, un problema con las válvulas del sistema de propulsión principal han
evitado que esté en la órbita que le diseñaron, y esperemos que el año que
viene baje a ella. No importa, ya que la información que tenemos hasta ahora es
tremenda, y nos sirve como aperitivo para lo que está por llegar. Marte ha sido
otro centro de atención, porque ha recibido savia nueva. Lanzadas el mes de marzo,
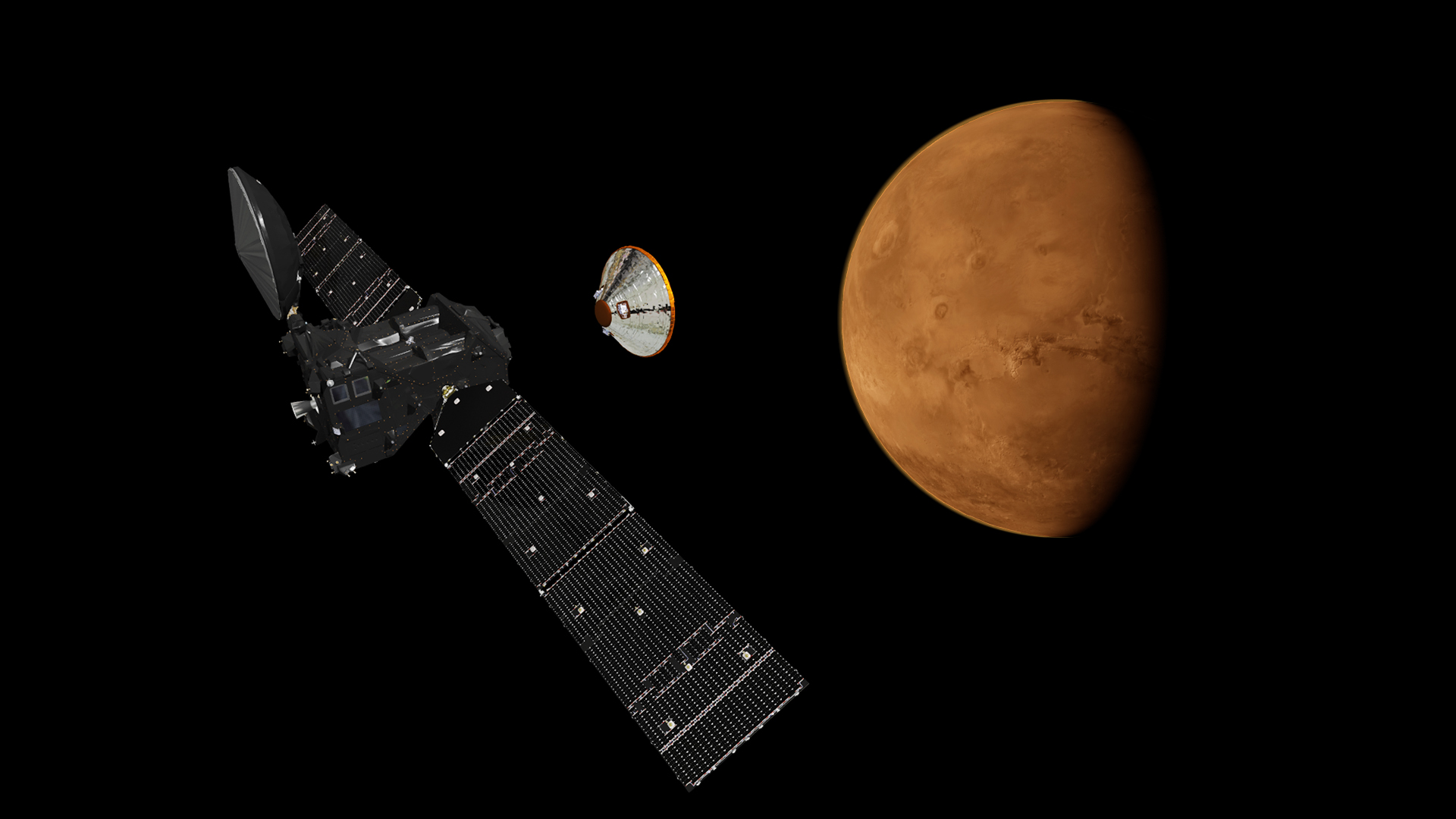
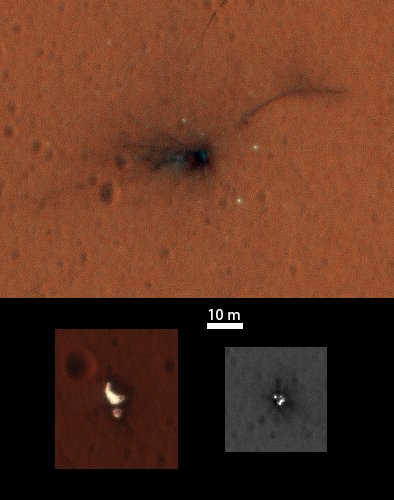
tanto ExoMars TGO como su aterrizador
Schiaparelli alcanzaron el planeta
rojo, y mientras el orbitador sigue en una forma excelente, su complemento de
superficie nos narró su descenso, pero un problema evitó que nos contara su
aterrizaje. A pesar de esta baja, ahora tenemos nueva cifra récord de vehículos
funcionando allí, nada menos que ocho, y es más que seguro que en el 2018
llegue otro más que sumar a la cuenta. Sobre los que están allí, siguen
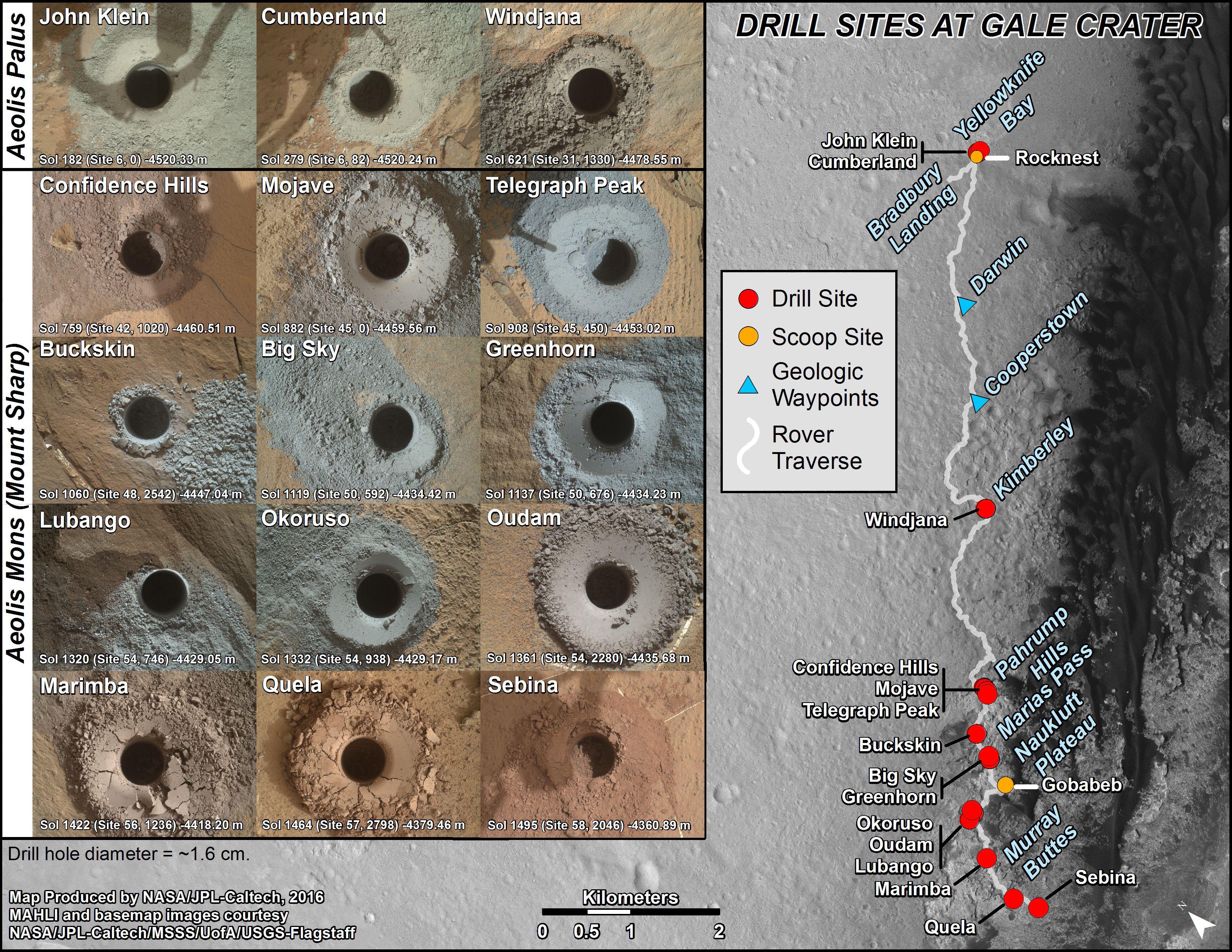
trabajando, con Curiosity taladrando
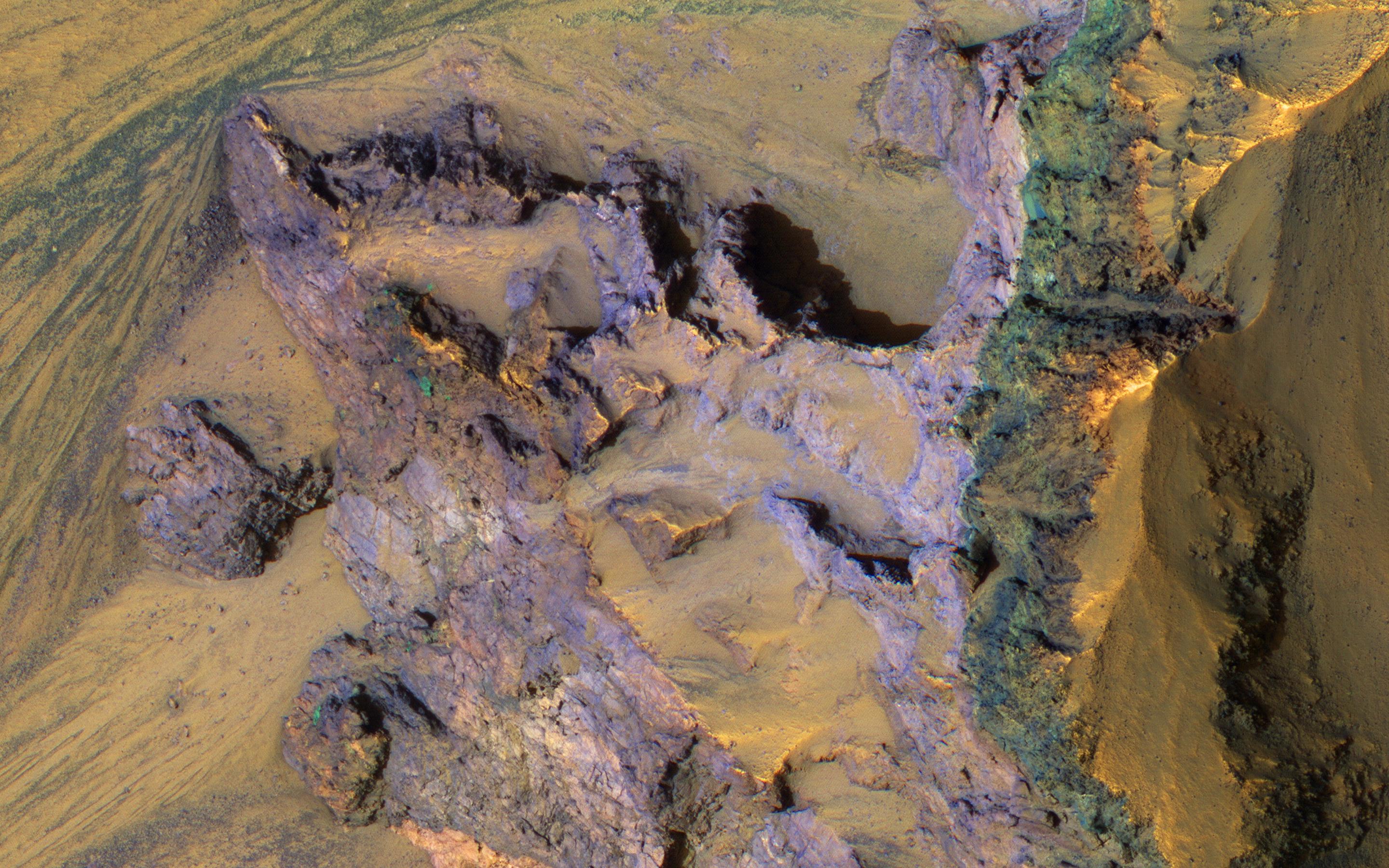
como nunca (y con pequeños problemas por el camino), con Opportunity abandonando el Marathon Valley para recorrer todavía
más el borde del cráter Endeavour (y de paso tratar de estudiar unos
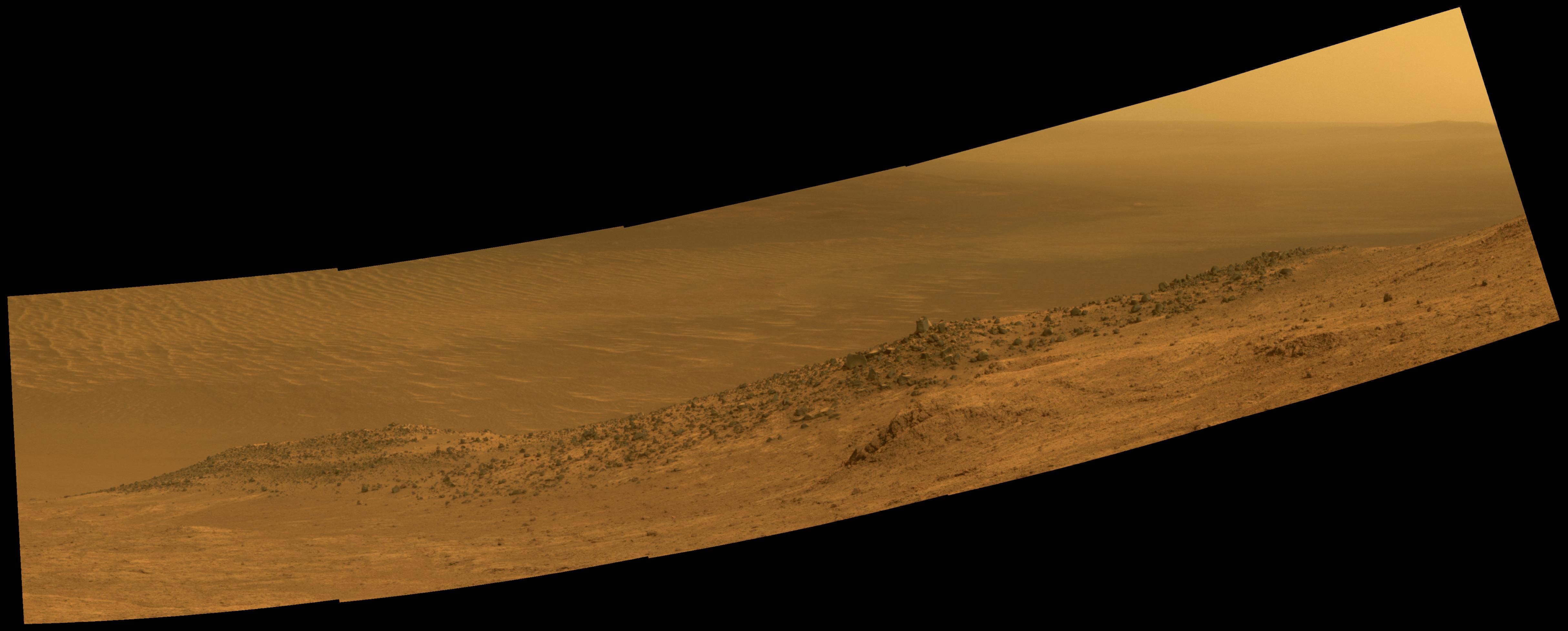
pequeños
barrancos que hay allí), con Mars Odyssey
y MRO cumpliendo años en Marte (15 el
primero, 10 el segundo), y el resto sigue sin más problemas. Ya hace un año que
Akatsuki alcanzó Venus a la segunda,
y ya en misión principal, nos regala, de cuando en cuando, asombrosas postales
desde la diosa de la belleza. Y mientras, por Saturno, nuestra cronista desde
allá, la venerable sonda Cassini,
cierra el que es su último año completo de indagación, y está ya en la
penúltima fase de su tarea. Con tiempo aún hasta su reentrada el 15 de
septiembre, todavía tiene mucho que hacer, con sus anillos, con sus satélites
pequeños, con el propio planeta, etc., pero este año tampoco ha estado
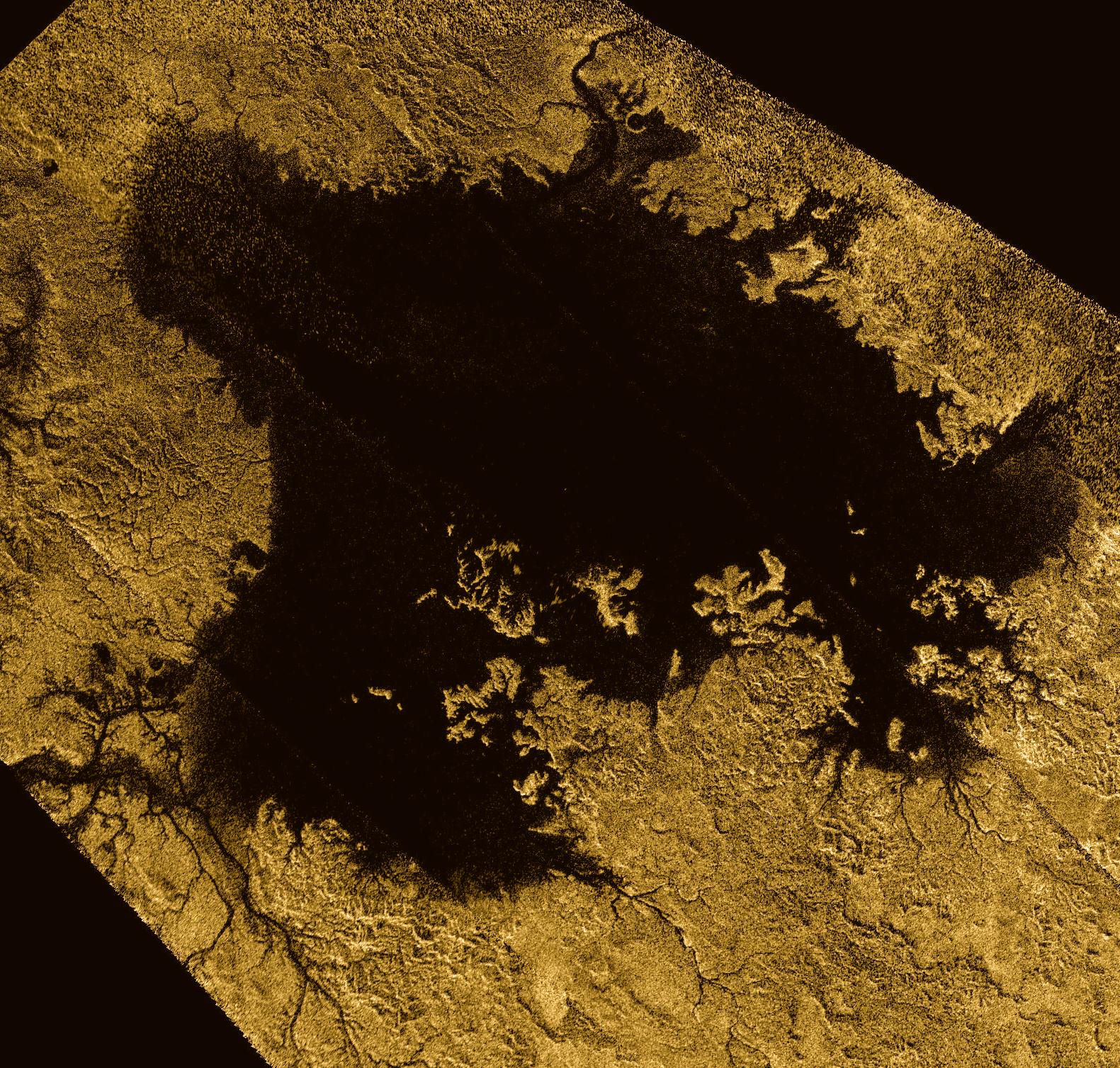
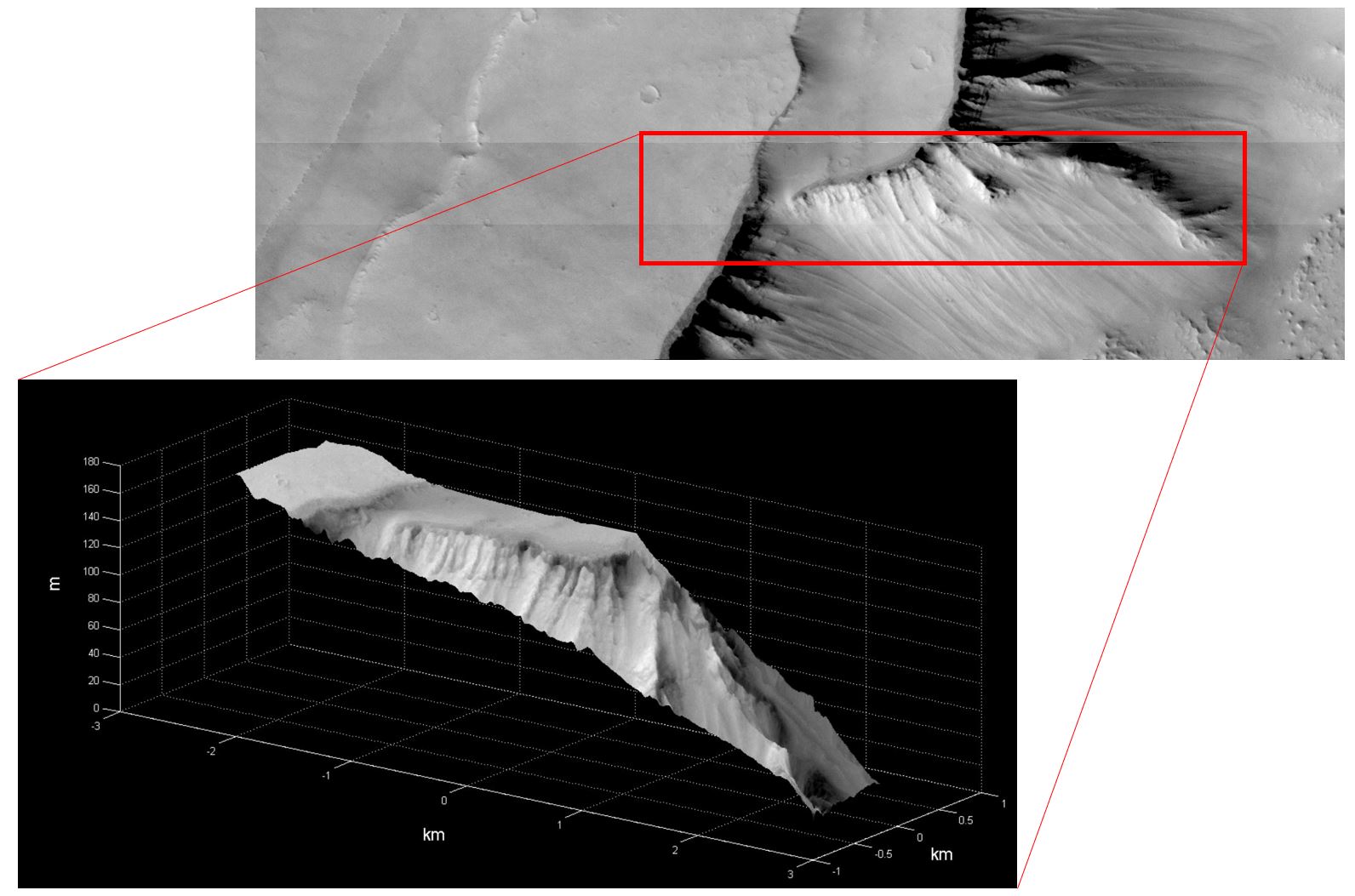
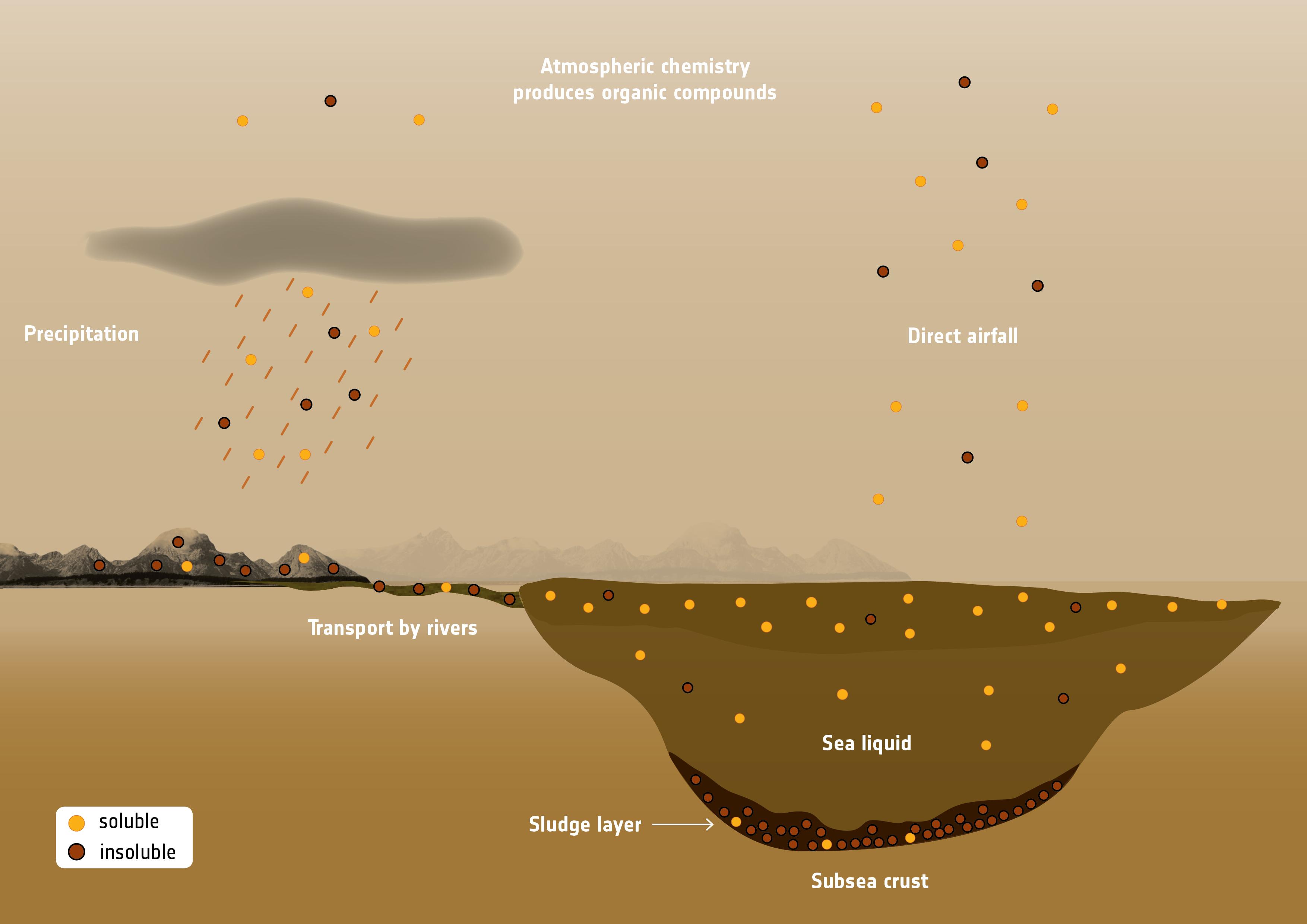
descansando, ya que nos ha intrigado con su exploración de los fondos de los
lagos de Titán (embarrados), nuevos cañones que culminan en sus lagos, el
fascinante cambio de tiempo en su polo norte del satélite gigante, nuevas
intrigas sobre sus anillos, y otras cosas. Para sorpresa de todos, en el
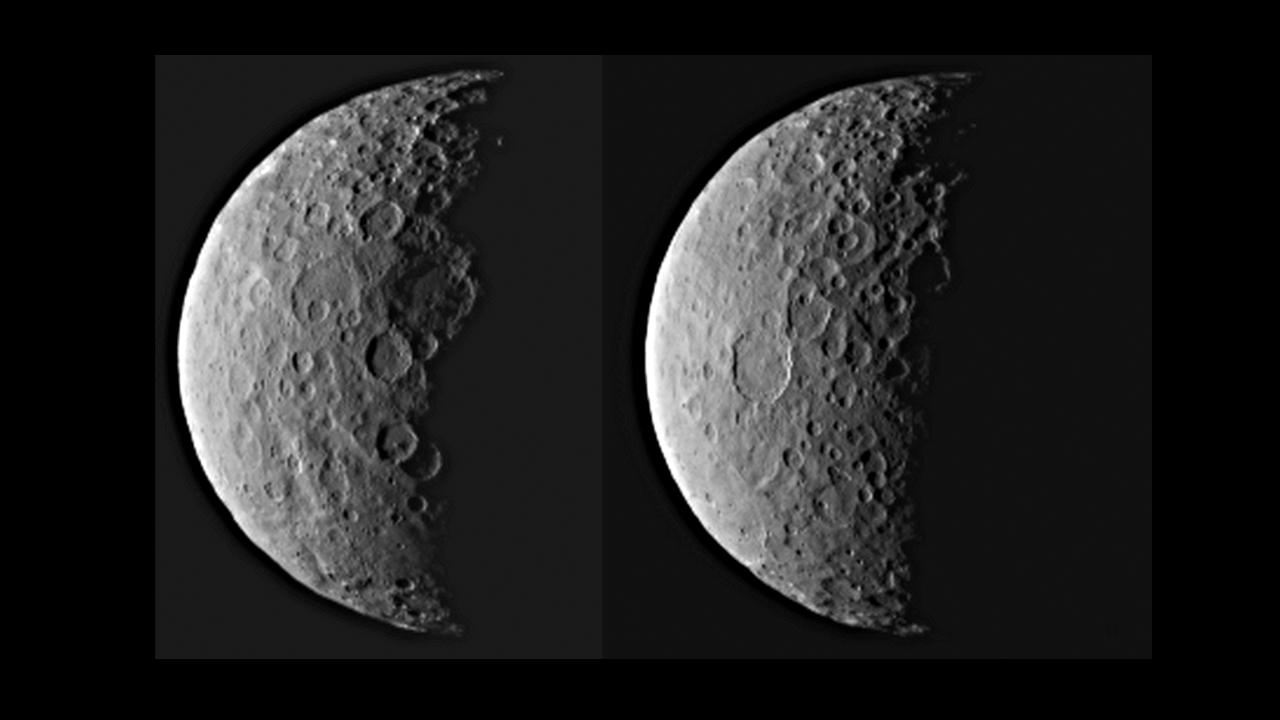
cinturón de asteroides sigue nuestra aventurera, la sonda Dawn que, tras observar Ceres desde más cerca que nunca, y con una
misión extendida aprobada (tras entregar muchísimo más de lo que le pedimos
originalmente) ha remontado el vuelo, y se encuentra a más de 7.000 km. de su
superficie, para ampliar todo lo que nos ha enseñado hasta la fecha. No sabemos
cuánto más durará, pero este tiempo será sin duda bienvenido. No nos olvidamos
de la última gran aventurera del sistema solar: New Horizons. Ahora que ha vaciado el cofre del tesoro, se prepara
para su nueva tarea, que es la de estudiar de lejos los objetos del Cinturón de
Kuiper que pasen frente a su objetivo, y que culminará con el broche de oro de
examinar uno de cerca, el 2014 MU69, el 1 de enero del 2019. Entre tanto, hemos sido testigos de cómo ese punto de luz llamado Plutón (y sus satélites) se
convertían en astros fascinantes,

demostrando que el planeta es un lugar vivo,
y sus satélites, lugares a los que volver, como al propio Plutón. Y un acontecimiento ocurrió a mitad de año, y es la resurrección de un observatorio solar tras 22 meses de silencio: STEREO-Behind. A pesar de unos primeros esfuerzos de recuperarlo, esta sonda sigue más o menos como estaba en el momento del primero contacto, y van a esperar a que esté más cerca para hacer un nuevo intento serio para devolverla a la actividad. No nos
podemos olvidar de los exoplanetas. A la nueva ristra de ellos confirmados a
partir de los datos de Kepler (que
elevan la cuenta a más de 2000) hay otros que en cierta medida reclaman
atención, como el más cercano a nosotros, Proxima b, orbitando alrededor de la
estrella más próxima al

Sol, Proxima Centauri, y sobre el que se está
debatiendo enormemente, o como el sistema TRAPPIST-1, tres planetas orbitando
una pequeña y fría estrella, y con posibilidades de que alguno de ellos pueda
ser tipo Tierra. Y en el resto de noticias del cosmos, mucho y variado, y
posiblemente las que destaquemos sean la del descubrimiento de la primera
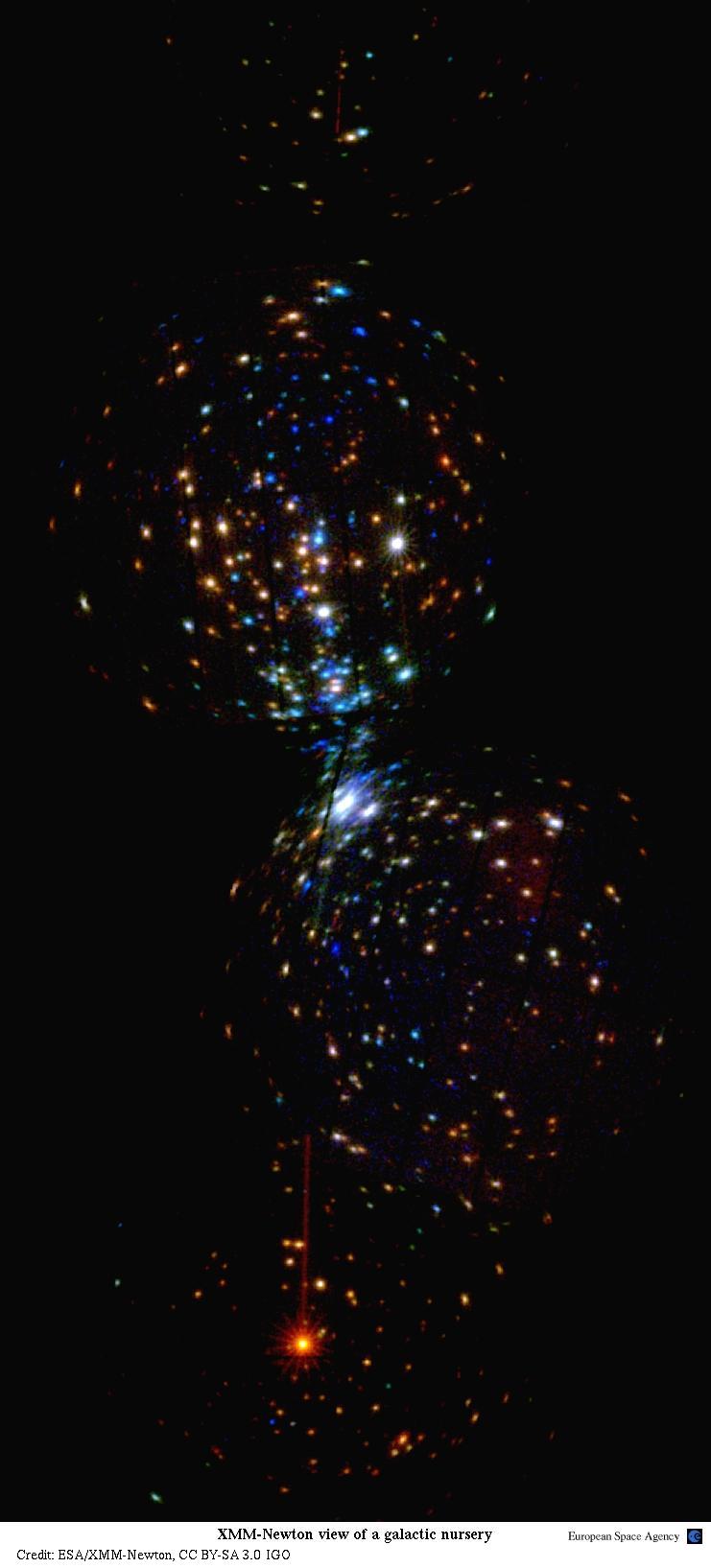
estrella de neutrones en la galaxia de Andrómeda por parte de XMM-Newton, y sobre todo, el hallazgo, por primera vez, de ondas gravitacionales emitidas por la fusión de agujeros negros. Y hay que decirlo, tanto XMM-Newton
como su hermano de la NASA Chandra
han cumplido 17 años de trabajo impecable, y todo lo que les espera todavía. No
tenemos recursos como ellos allí arriba. Y por aquí abajo, en la Tierra, la
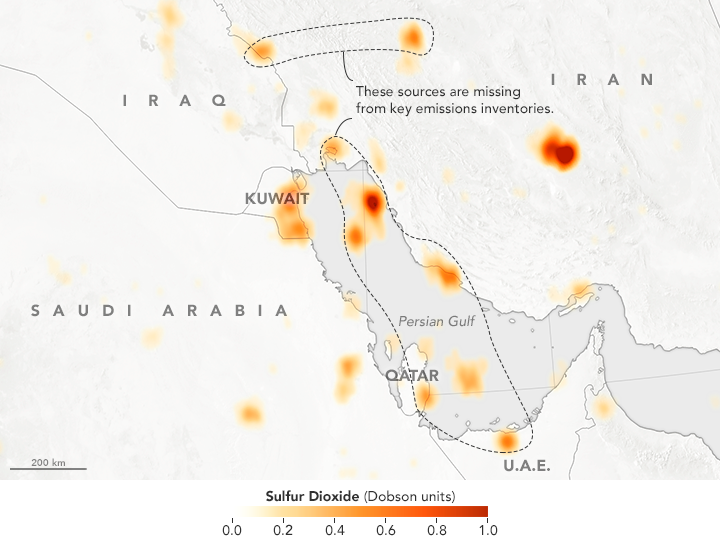
ciencia terrestre sigue en marcha, con un resultado sobre todo que enfada, que
es la detección de emisiones contaminantes de dióxido de azufre no reconocidas, por parte
de los satélites que hay en órbita. Por supuesto, se ha seguido monitorizando
el dióxido de carbono, observando y cuantificando los desastres, vigilando el
fenómeno de El Niño, ya acabado, y más cosas. Por supuesto, no nos olvidamos de la ISS, que este año ha recibido nuevo espacio habitable, en forma de módulo inflable, que no solo
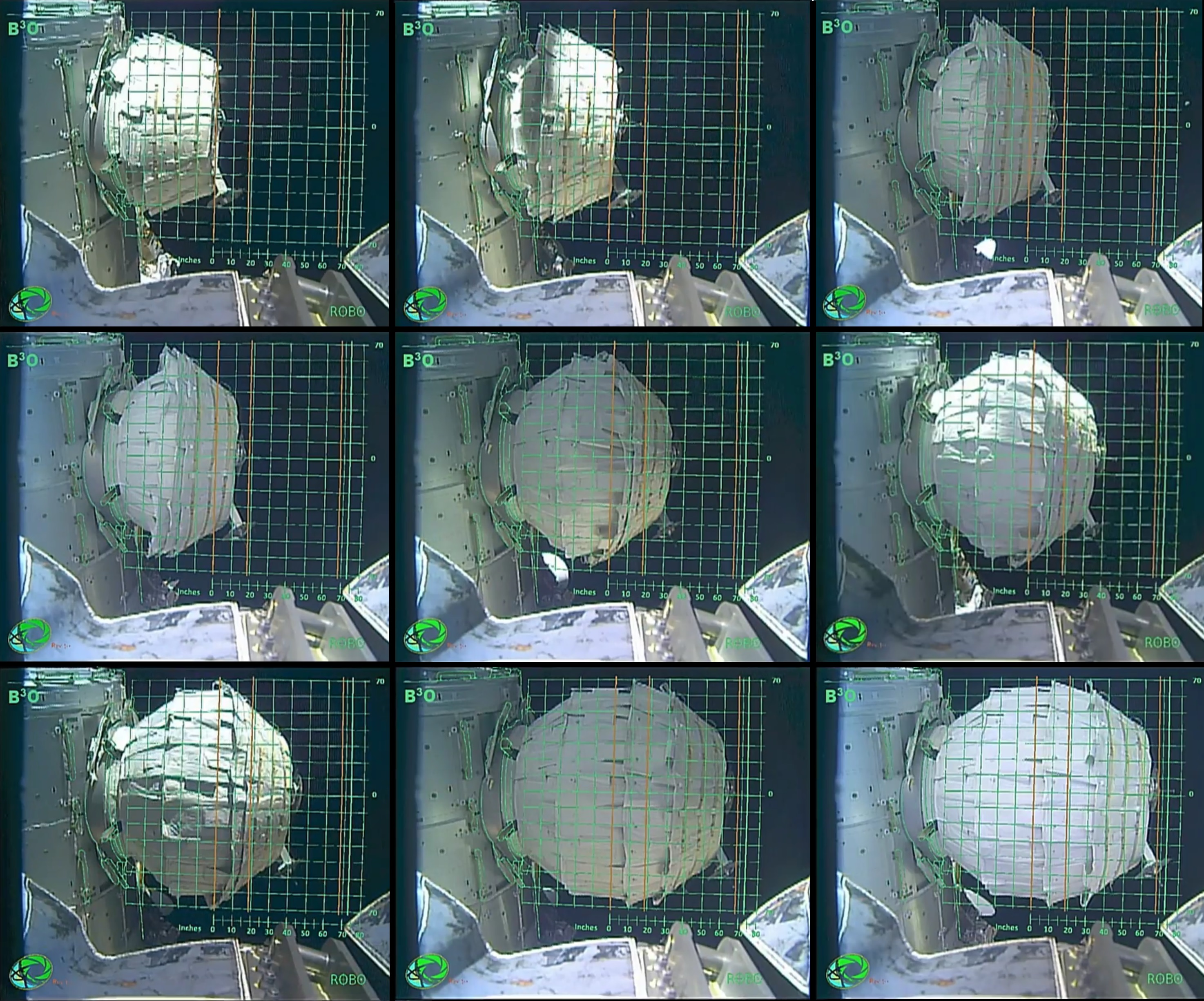
cumple las expectativas, las está superando. También este
es el año del retorno al vuelo del cohete Antares,
el que envía la nave de carga Cygnus
al complejo, y tras dos vuelos en los que ha usado el veterano y fiable Atlas V, vuelve a los orígenes, aunque
con calma. En cuanto a la lista de altas, mucha ciencia terrestre, en forma de Jason-3, Sentinel-3A y Sentinel-1B,
GOES-R (ya GOES 16), CYGNSS y la misión japonesa a los cinturones de radiación ERG, ya conocida como Arase, pero
al espacio profundo, además de ExoMars
TGO y Schiaparelli, la misión de
recogida de muestras de un asteroide OSIRIS-REx,
elevada este mes de septiembre, cogiendo el billete de ida hacia el asteroide
Bennu. La de bajas es más bien corta: el sensor de vientos ISS-RapidScat (un problema con el suministro de energía), el ya
mencionado Schiaparelli (problemas en
el descenso y colisión con la superficie), el breve y trágico vuelo del
observatorio japonés Hitomi (problemas
informáticos y mal manejo) y, por supuesto, la misión que nos ha mantenido en
vilo estos últimos años: Rosetta y Philae, con ambas ya descansando al fin
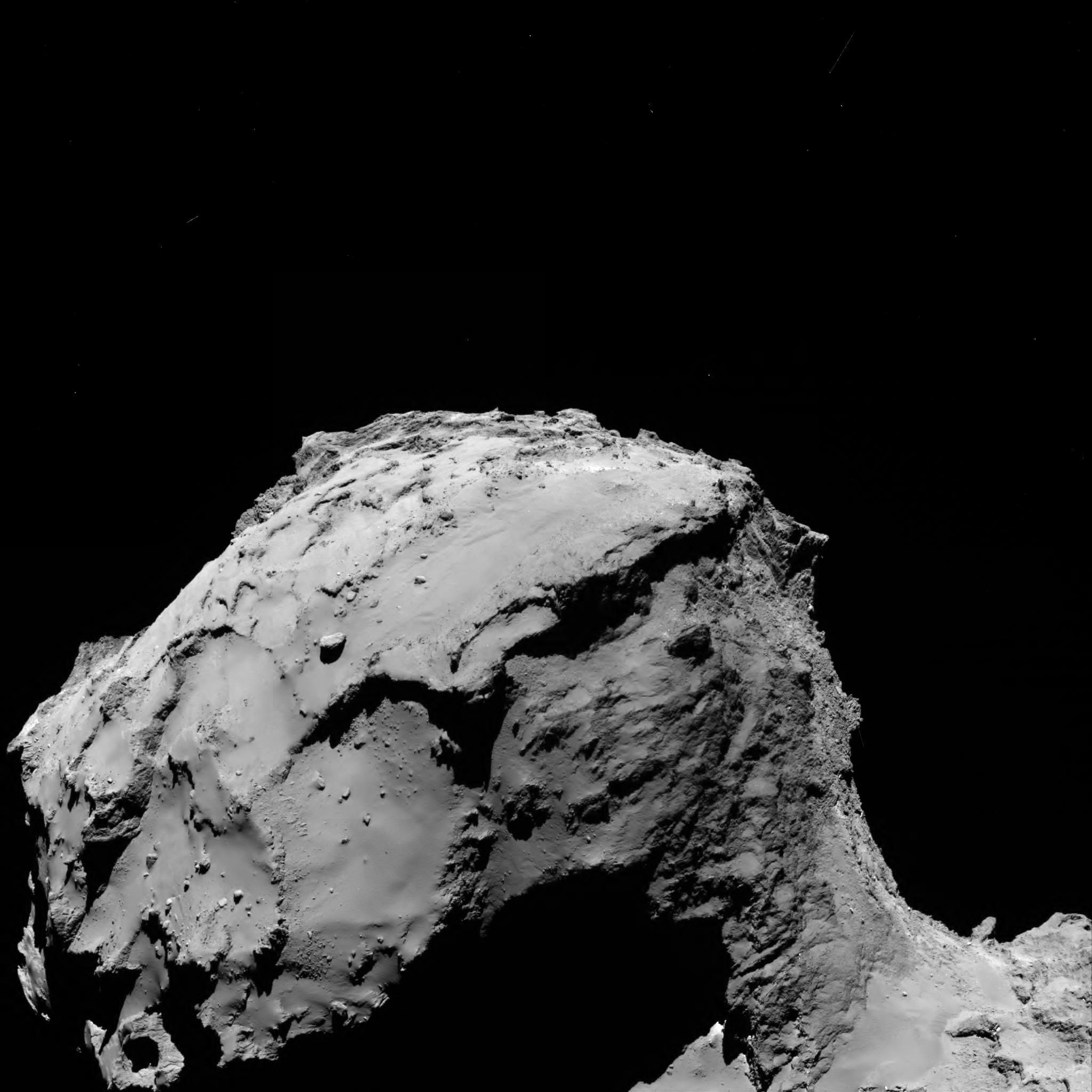
en la superficie del cometa 67P/Churyumov-Gerasimenko, enseñándonos cosas hasta
el mismísimo fin de misión, y todo lo que queda por analizar, comprender,
publicar y alucinar. Y lo que nos espera en el 2017: el aerofrenado de ExoMars TGO, el séquito marciano continuando
sus tareas, el sobrevuelo de OSIRIS-REx
a la Tierra en septiembre, nuevas misiones al planeta Tierra (dos o tres Sentinel más, la esperada ADM-Aeolus, el explorador de alta
atmósfera ICON), y el fin de misión
de dos misiones que se han hecho un hueco en la historia: Dawn en Ceres, y el más anunciado pero no menos doloroso, Cassini en Saturno, en el año en que
cumplirá los 20 desde su lanzamiento. Las despediremos como merecen. Y estaremos
aquí para relatarlo.
lunes, 5 de diciembre de 2016
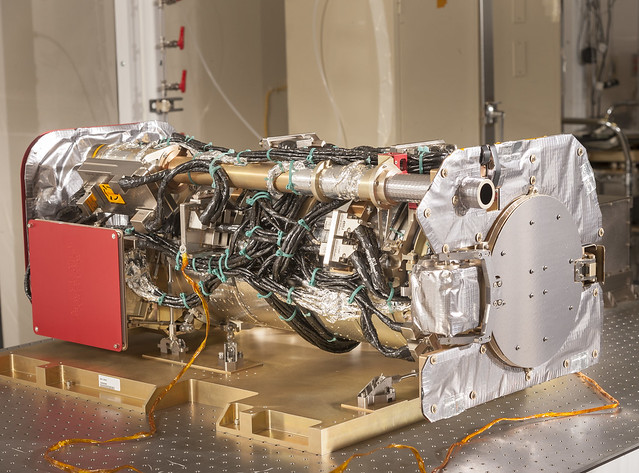
Misión al planeta Tierra: CYGNSS
¿Cómo os quedáis si os decimos que estamos a punto de medir los
vientos oceánicos usando las señales GPS? Pues sí, ya que un proyecto está a
punto de ser enviado allí arriba para ello, para proporcionarnos una nueva
perspectiva de los ciclones tropicales, y sus sucedáneos.



Encuadrado en el programa Earth System Science Pathfinder, que ha dado
otras misiones como GRACE y OCO-2, es la primera de toda una serie
de proyectos denominada Earth Venture, que usará tanto misiones completas como
instrumentos para realizar ciencia innovadora. Como la primera de estas
misiones, CYGNSS (Sistema Global de
Navegación por Satélite para Ciclones) es una prueba de concepto para comprobar
que este método de medición funciona, tomando por el camino datos imposibles de
obtener usando otras técnicas. Como hemos dicho, son ocho los satélites, porque
para tomar las mediciones necesarias un único satélite se quedaría corto,
mientras una constelación ofrece una mayor oportunidad de muestreo en el
dinámico ambiente de una tormenta tropical.

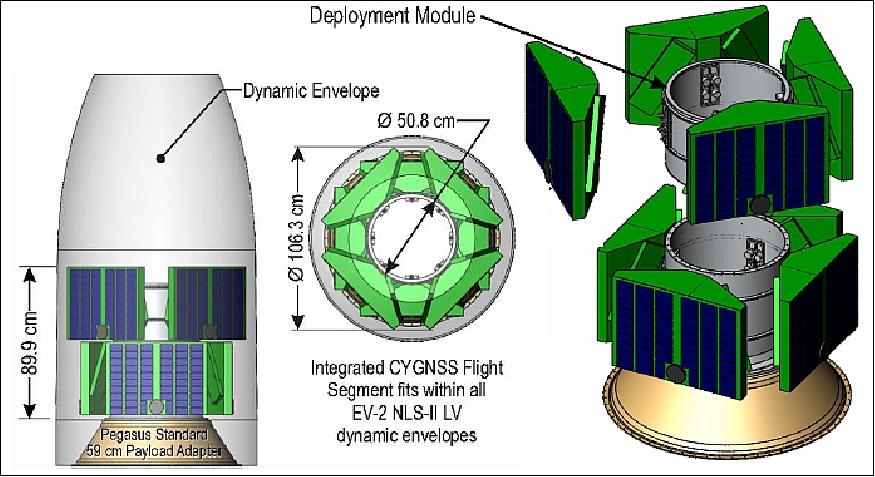
A diferencia de muchas de las misiones que hemos relatado en esta Crónica,
los ocho satélites CYGNSS son
pequeños microsatélites, con medidas de 51 centímetros de largo, 59 de ancho y
22 de alto, y una vez desplegados en el espacio, una envergadura de 160
centímetros. Tienen forma triangular, más estrecha en el lado terrestre, y más
ancho en el espacial, contando en su interior con todo lo necesario para funcionar
en un paquete completamente integrado. Todos los elementos son de amplia
herencia, usados en muchas misiones, tanto de órbita terrestre como de espacio
profundo. Eso sí, la redundancia es funciona o selectiva. El poco espacio
obliga. Su ordenador está centralizado en el procesador de doble núcleo LEON3 FT,
y a su alrededor se ha construido la arquitectura Centaur, para
 ejercitar todas
las operaciones de a bordo, y va acompañado por un grabador de datos de 4 GB
empleando tecnología de memoria flash. Sus comunicaciones son mediante un
sistema de banda-S, empleando un sistema bidireccional (emisión y recepción)
conectado a dos antenas del tipo parche de microtiras, una en la parte inferior
y otra en la superior. La energía la recibe del Sol, empleando las células
solares colocadas por todas las superficies disponibles, tanto en los paneles
frontal y trasero, inferiores, y sobre todo, los superiores, a los que van
conectados los paneles desplegables. Estos
ejercitar todas
las operaciones de a bordo, y va acompañado por un grabador de datos de 4 GB
empleando tecnología de memoria flash. Sus comunicaciones son mediante un
sistema de banda-S, empleando un sistema bidireccional (emisión y recepción)
conectado a dos antenas del tipo parche de microtiras, una en la parte inferior
y otra en la superior. La energía la recibe del Sol, empleando las células
solares colocadas por todas las superficies disponibles, tanto en los paneles
frontal y trasero, inferiores, y sobre todo, los superiores, a los que van
conectados los paneles desplegables. Estos
 poseen tres secciones por panel, y
emplean células de alta eficiencia, totalizando una superficie activa de 0.71
metros cuadrados, suficiente para alimentar los sistemas de a bordo, y al
tiempo cargar las dos pequeñas baterías de ión-litio. Estabilizados en sus tres
ejes, carecen de toda propulsión, empleando para ello un sistema de referencia
inercial, un escáner estelar, tres ruedas de reacción acopladas a sistemas de
descompensación magnética y un magnetómetro, además de sensores solares. En cuanto
al control termal, emplea mantas multicapa, radiadores, y diversos tratamientos
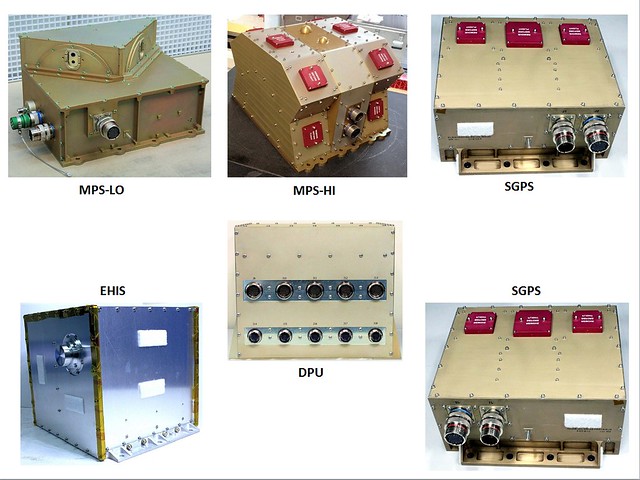
sobre varias de las superficies. La única carga útil de cada satélite se llama
DDMI, Instrumento de Cartografía de Retraso Doppler. Está compuesto por el
Receptor de Cartografía de Retraso, dos antenas receptoras GPS (en las
superficies superior e inferior de cada satélite) y cinco receptores GPS, uno
para la tarea habitual de posicionar el satélite alrededor de la Tierra, y
otros cuatro para realizar el procesado de señal para las mediciones científicas.
Cada receptor modificado generará un mapa de Retraso Doppler, y con los cuatro,
se consigue extraer la velocidad del viento en superficie. Pero al ser una
constelación, el resultado serán 32 de estos mapas de Retraso Doppler para
conseguir mediciones de la velocidad del viento más exactas. Toda esta
información será guardada en un grabador propio, con capacidad de 1 GB. La masa
de cada satélite es de 24 kg.
poseen tres secciones por panel, y
emplean células de alta eficiencia, totalizando una superficie activa de 0.71
metros cuadrados, suficiente para alimentar los sistemas de a bordo, y al
tiempo cargar las dos pequeñas baterías de ión-litio. Estabilizados en sus tres
ejes, carecen de toda propulsión, empleando para ello un sistema de referencia
inercial, un escáner estelar, tres ruedas de reacción acopladas a sistemas de
descompensación magnética y un magnetómetro, además de sensores solares. En cuanto
al control termal, emplea mantas multicapa, radiadores, y diversos tratamientos
sobre varias de las superficies. La única carga útil de cada satélite se llama
DDMI, Instrumento de Cartografía de Retraso Doppler. Está compuesto por el
Receptor de Cartografía de Retraso, dos antenas receptoras GPS (en las
superficies superior e inferior de cada satélite) y cinco receptores GPS, uno
para la tarea habitual de posicionar el satélite alrededor de la Tierra, y
otros cuatro para realizar el procesado de señal para las mediciones científicas.
Cada receptor modificado generará un mapa de Retraso Doppler, y con los cuatro,
se consigue extraer la velocidad del viento en superficie. Pero al ser una
constelación, el resultado serán 32 de estos mapas de Retraso Doppler para
conseguir mediciones de la velocidad del viento más exactas. Toda esta
información será guardada en un grabador propio, con capacidad de 1 GB. La masa
de cada satélite es de 24 kg.





Desde aquí celebramos las misiones innovadoras, solo que todavía
estamos encadenados a la superficie oceánica. El año que viene, llega otro
innovador al juego de la velocidad del viento, por parte de la ESA, y ya
hablaremos de él.
miércoles, 30 de noviembre de 2016
sábado, 12 de noviembre de 2016
Misión al planeta Tierra: GOES-R
Actualmente, el lanzamiento de satélites a órbitas geoestacionarias es
el pan nuestro de cada día, de tal manera que no aparecen en los servicios de
prensa, salvo por accidentes. Ahí arriba, la mayoría son de telecomunicaciones,
aunque una pequeña parte están allí para otras tareas distintas: los estudios
meteorológicos. Pronto se lanzará un satélite meteorológico de nueva
generación, que trae nuevas prestaciones para proporcionar más y mejor
información para las agencias que se encargan de este tema.


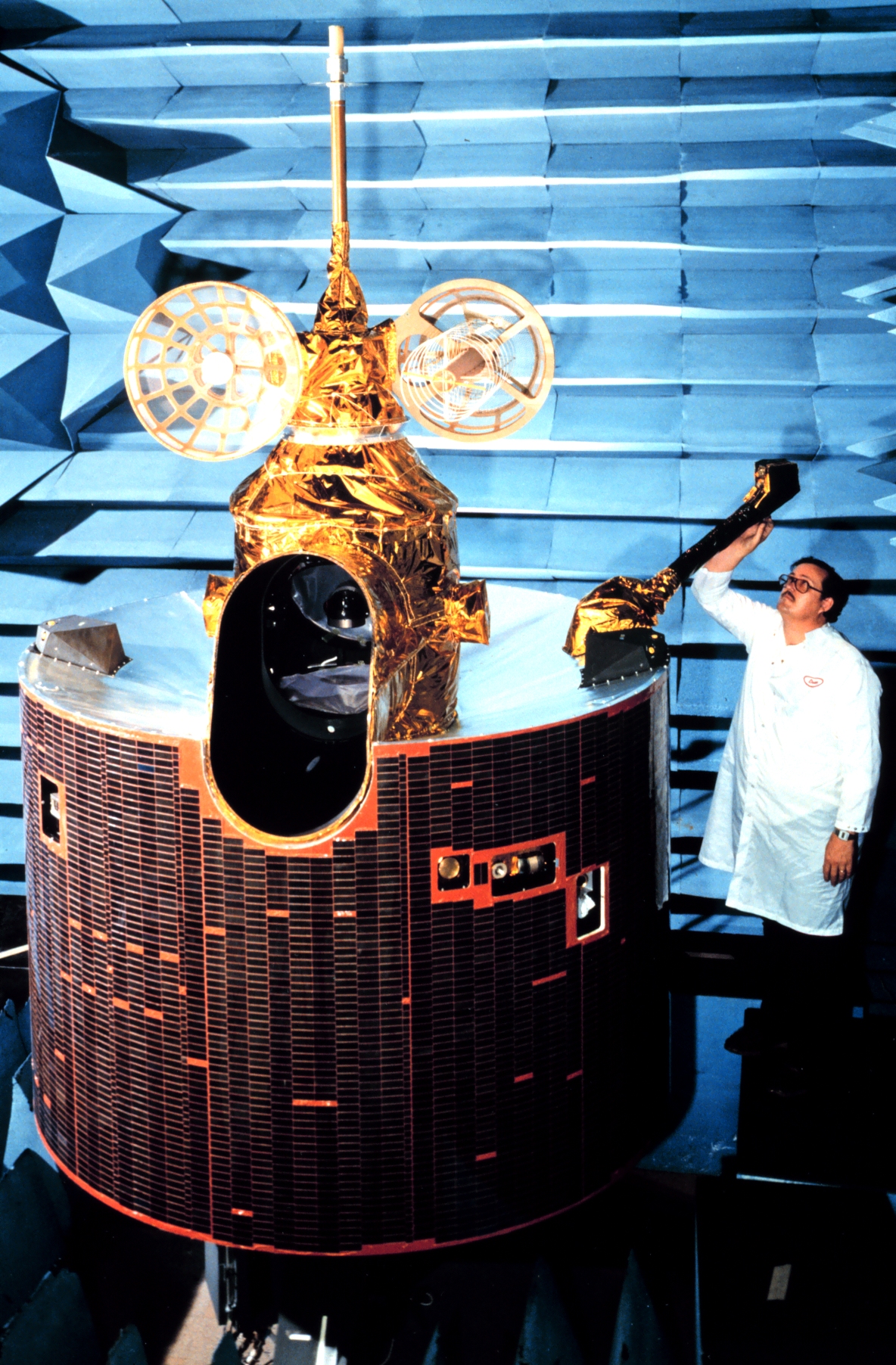
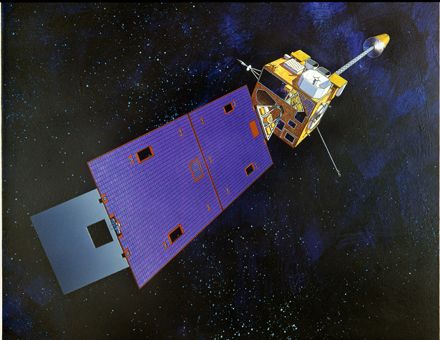







Actualmente hay tres satélites GOES
en servicio, dos proporcionando información meteorológica regular, y uno en
almacenamiento en caso de que uno de ellos sufra alguna anomalía o avería. De esta
manera, tenemos a GOES-N (como GOES 13) en la posición 75º Oeste, funcionando
como GOES-East, a GOES-P (GOES 15) en la posición 135º Oeste como GOES-West, y a GOES-O (GOES 14) en almacenamiento en órbita en
posición 105º Oeste. Cuando GOES-R
llegue a la órbita, y renombrado como GOES
16, se establecerá en su posición temporal antes mencionada para recibir un
periodo de chequeo y validación de un año de duración, tras lo cual se espera
que entre en operación de manera inmediata, aunque es todavía pronto saber en
qué posición operacional será situado.
GOES-R no será un modelo
único en la serie, ya que en los próximos años serán elevados sus hermanos GOES-S (por el momento, para el 2018) GOES-T (2019) y GOES-U (2024), que están en producción. Todo para mejorar la
ciencia de la meteorología y los pronósticos, aunque a veces no lo parezca.
lunes, 31 de octubre de 2016
Ventana al Espacio (LXXXVIII)

La estrella recién nacida RNO 91, tras la nube oscura LDN 43, desde el telescopio Hubble
viernes, 30 de septiembre de 2016

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
jueves, 1 de septiembre de 2016
Las próximas misiones a los asteroides: OSIRIS-REx
De entre los fósiles que existen en el sistema solar que nos pueden
proporcionar pistas sobre la creación de los planetas terrestres, posiblemente
los asteroides son los que podrían decirnos más. Además de los cometas, varios
satélites de planetas exteriores, e incluso el Sol, estos cuerpos celestes,
debido a que han permanecido inalterados desde los tiempos primitivos, son los
más prometedores. Sin duda, los datos que las sondas espaciales puedan
proporcionar de ellos resultan muy valiosos para los científicos, pero es muy
distinto observar muestras con instrumentos remotos montados en vehículos
costosos y complejos, que hacerlo tú mismo usando un simple microscopio. De
ahí, que la NASA tenga a punto una misión con el encargo principal de recoger
un pedazo de asteroide para su posterior análisis en los laboratorios de todo
el mundo.

Desde que empezamos por fin a estudiar los asteroides con los ojos de
los artefactos espaciales, hemos visitado hasta 12 objetos de este tipo.
Fragmentos diminutos como Itokawa, enormes rocas como Ceres, todos nos han
resultado ciertamente interesantes, y han contribuido a conseguir más o menos
una cierta cronología de cómo se formó el sistema solar. Hasta la fecha, solo
ha habido tres misiones cuyo objetivo principal eran estos cuerpos: NEAR-Shoemaker
a Eros, Hayabusa a Itokawa, y Dawn a Vesta y Ceres. Solo la japonesa
tenía el cometido principal de coger polvo de la superficie de su destino para
su posterior retorno a la Tierra, algo conseguido en junio del 2011. Ahora, bajo
el paraguas del programa New Frontiers, la NASA ha preparado una misión de
filosofía idéntica a Hayabusa, un
tanto más compleja, para en esencia responder las mismas preguntas.
{kind=link}
{kind=link}
{kind=link}
Elegida en el verano del año 2011, se podría decir que OSIRIS-REx es una misión que ha tenido
largo recorrido. El primer concepto apareció en el año 2004 para su entrega al
programa Discovery, y llegó a la final en la que fue elegida la misión lunar GRAIL. Después que la NASA indicara una
misión de recogida de muestras asteroidal como prioritaria, la formulación de
la misión para su aceptación para el programa New Frontiers comenzó en el 2009
para su posterior entrega, y final selección. Como misión del programa New
Frontiers, OSIRIS-REx dispone de
abundante presupuesto para solucionar las complejidades técnicas provocadas por
el perfil de misión, sin embargo, también en ella se ha fomentado el ahorro de
costes, a base de usar tanto hardware como software completamente probados en
el espacio, utilizando elementos que son herencia de tres proyectos distintos.
El objetivo de OSIRIS-REx (acrónimo
de Explorador de Orígenes, Interpretación Espectral, Identificación de
Recursos, Seguridad y Regolito) es el de viajar a un asteroide de la familia de
los NEO’s, los asteroides cercanos a la Tierra (es decir, de la misma familia
que Eros), principalmente porque su acceso es sencillo, reduce los riesgos de
la misión y podría darnos los primeros detalles de los recursos que pueden
existir en buena parte de estos trozos de roca que orbitan en torno al Sol. Una
vez en torno a su destino, lo estudiará con sus aparatos de a bordo para tratar
de averiguar qué materiales lo conforman, cómo se formó, sus movimientos en el
espacio, y el posible peligro que pueda suponer para la Tierra. En esencia
estos son los objetivos de esta misión, la segunda de espacio profundo
administrada y dirigida por el Laboratorio Lunar y Planetario de la Universidad
de Arizona, después de la exitosa marciana Phoenix.

OSIRIS-REx es la cuarta
sonda de la familia de vehículos espaciales estrenada por la marciana Mars Reconnaissance Orbiter. Debido a
esto, muchos de los componentes de la sonda son basados en el veterano
orbitador lanzado en el 2005. La estructura está elaborada en aluminio y
compuestos de grafito, poseyendo un gran cilindro central como soporte
primario, del que nacen los soportes verticales en forma de X, soportando dos
plataformas, en este caso la superior para el propulsor principal y la inferior
para el equipamiento científico. La estructura resulta más ancha que en MRO o MAVEN, resultando en un rectángulo de 2.4 x 2.4 x 3.2 metros. El
ordenador de a bordo se estructura en torno al ya tradicional procesador
RAD750, con una memoria RAM de 256 MB, más el almacenamiento para los datos de
los instrumentos. Está estabilizada en sus tres ejes, usando los elementos de
costumbre, es decir, dos unidades

de medición inercial, dos escáneres estelares
y un grupo de sensores solares digitales. La energía proviene de dos grandes
paneles solares que, una vez desplegados, proporcionan una envergadura de 6.2 metros, totalizando una superficie activa
de 8.5 metros cuadrados, alimentando los sistemas de a bordo y almacenándola en dos baterías de ión litio. Las
comunicaciones se gestionan a través de un transpondedor de banda-X, conectado
a una antena de alta ganancia de 2 metros de diámetro (situada en el lateral de
la sonda que soporta los dos paneles solares), una antena de media ganancia
colocada al lado del propulsor principal, y dos de baja ganancia acopladas en
las plataformas superior e inferior. La propulsión es química, equipando tres
grupos. El más potente es el sistema principal, formado por cuatro propulsores
derivados de los usados por MAVEN,
con la misión de colocar en órbita la sonda en torno a su destino y
posteriormente sacarla de allí. Dispone de uno intermedio para las maniobras de
corrección de rumbo, mientras que el menos potente controla la actitud del
vehículo. Un tanque de combustible, situado dentro del núcleo central de la
estructura, tiene capacidad para almacenar 1.700 kg. El control de la
temperatura usa los elementos de costumbre: radiadores, mantas multicapa y
calentadores eléctricos. En total, son seis los experimentos científicos,
desarrollados a partir de la experiencia ganada con NEAR-Shoemaker. OCAMS, Juego
de Cámaras de OSIRIS-REx, conjuga
tres tipos distintos de objetivos, cada uno con su propio uso.

POLYCAM es un
telescopio reflector Ritchey-Chretien de 20.3 centímetros de apertura y una longitud focal de
63.5 cm. (f/3.15) que será la cámara principal durante toda la misión. Está preparada
para la adquisición de imágenes de largo alcance, apropiadas para gestionar la
navegación de la sonda, y en especial para la fase de aproximación a su
objetivo. Una vez en torno al asteroide, servirá como cámara de campo ancho
para tomar secuencias del objeto entero en alta resolución (1 metro). Además
incorpora un dispositivo de enfoque (empleando un elemento óptico móvil frente al detector) que transforma el telescopio en microscopio,
que permite observar pequeños objetos en primer plano. MAPCAM ha sido diseñada
para realizar, como su nombre indica, los mapas del asteroide en media
resolución y cuatro colores (azul, verde, rojo e infrarrojo cercano) empleando un telescopio

refractor de cinco elementos, con una longitud focal de 125 mm. (f/3.3) y una rueda de filtros de igual número de posiciones, además de caracterizar las
regiones candidatas para la recolección de muestras. SAMCAM es un objetivo milimétrico
con el encargo de realizar primeros planos durante la adquisición de muestras
con una cadencia casi idéntica a la de una cámara de vídeo, y para caracterizar
el regolito y las rocas que puedan existir en la superficie. también será usado para tomar imágenes de campo ancho del asteroide, generando mapas de baja resolución. Dispone de un sistema refractor con una longitud focal de 28 mm. (f/5.5), y posee una rueda de
filtros de tres posiciones con filtros idénticos, de manera que si uno acaba
bloqueado por el regolito, se cambia al siguiente, mientras que la cuarta posición está ocupada por un elemento óptico que cambia el enfoque, lo que le permitirá examinar la cabeza de muestras antes de ser almacenada. las tres cámaras emplean sensores idénticos tipo CCD, de 1024 x 1024 pixels. OLA, Altímetro Láser de OSIRIS-REx, se basa en instrumentos
similares montados en sondas como NEAR-Shoemaker, Mars Global Surveyor, MESSENGER
o Lunar Reconnaissance Orbiter. Es un
instrumento tipo LIDAR y tiene la misión de realizar
{kind=link}

un completo mapa
topográfico del asteroide, a la vez que será usado para caracterizar las zonas
candidatas para el muestreo. Además, posee un aparato que apunta el emisor
láser a distintos puntos de la superficie asteroidal sin necesidad de cambiar
la actitud de la sonda, permitiendo la construcción de imágenes en 3D del área
escaneada. Durante la fase de aproximación, servirá como medidor de distancia
entre la sonda y el asteroide para saber la posición exacta con respecto a su
destino. Lo novedoso es que dispone de dos transmisores láser, uno de alta energía para distancias superiores a un kilómetro, y uno de baja energía para distancias inferiores al kilómetro y medio. OVIRS, Espectrómetro de Visible e Infrarrojo de OSIRIS-REx, es un versátil instrumento (derivado del canal LEISA
del sistema Ralph a bordo de la sonda
New Horizons) que tiene el encargo de
realizar un mapa global de minerales y elementos orgánicos con una resolución
aproximada de 20 metros entre una longitud de onda de entre 0.4 a 4.3 micrones en el infrarrojo cercano, a la vez que recolecta información mineralógica de las
zonas candidatas para la recolección de

muestras (resolución menor a 2 metros).
Para ello dispone de un sensor de 512 x 512 píxels, y sobre él los distintos
filtros espectrales en configuración lineal variable, es decir, una lámina del
mismo tamaño que el sensor pero con los filtros situados en columna, al estilo
del sensor infrarrojo THEMIS de Mars
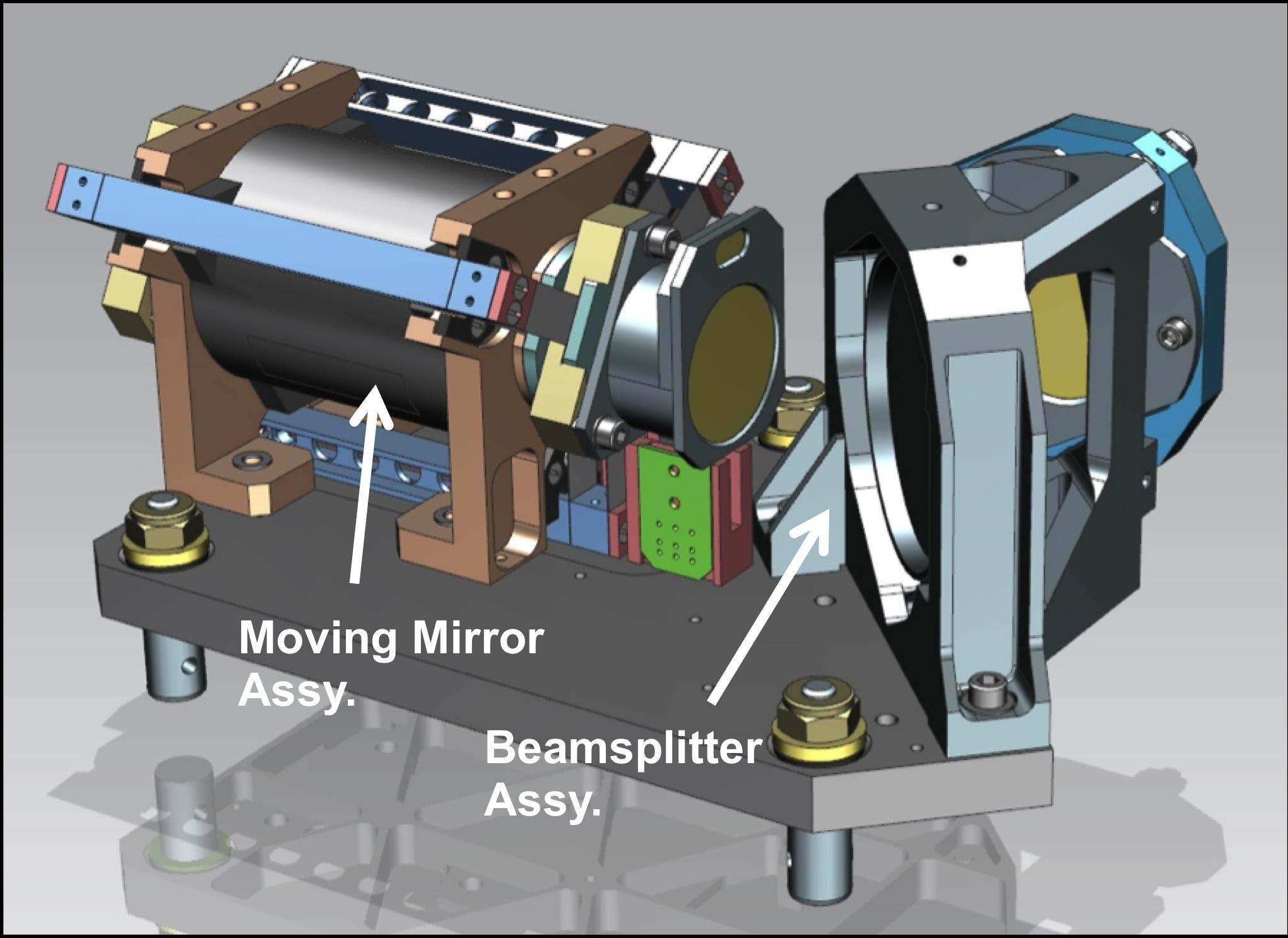
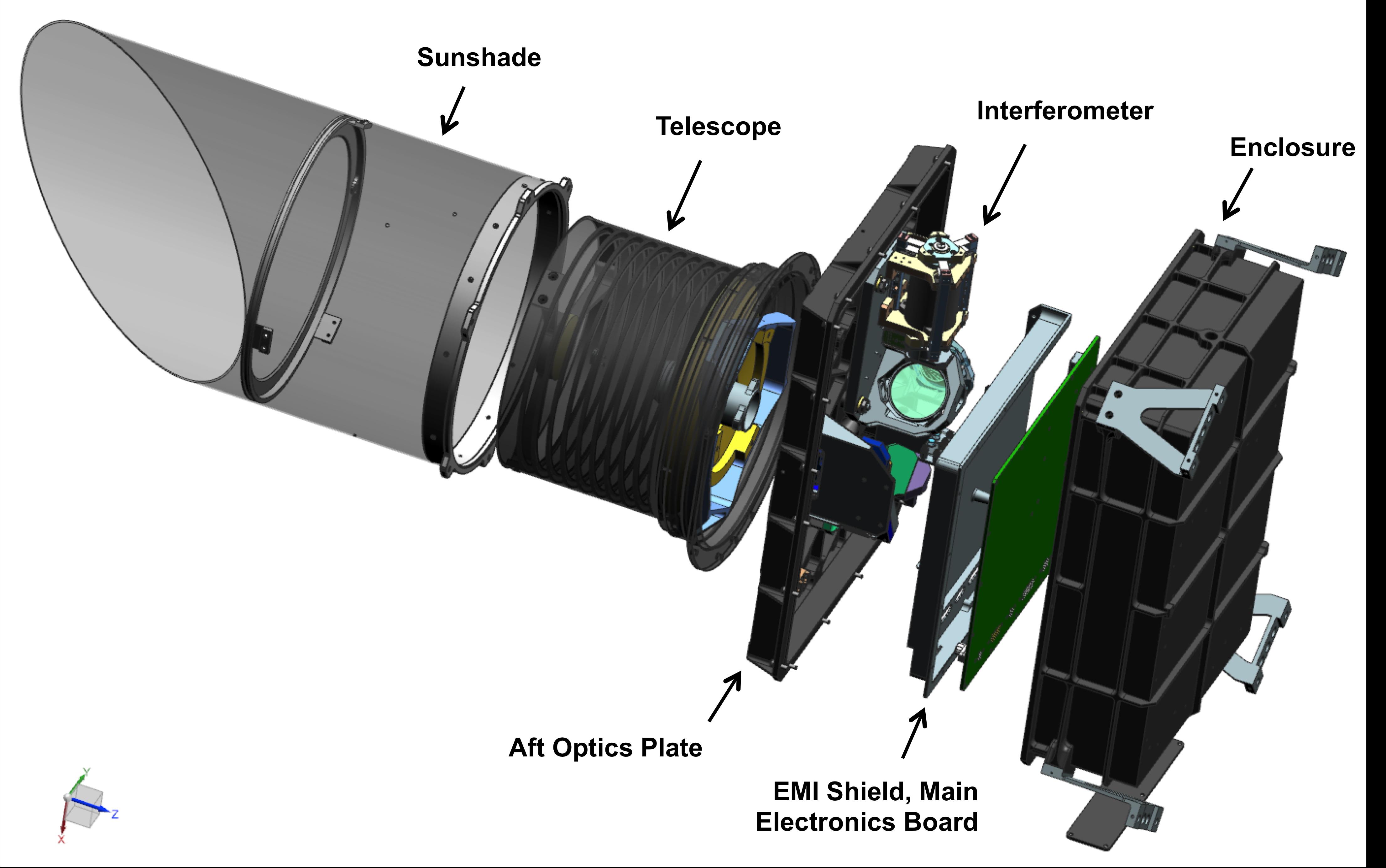
Odyssey. OTES, Espectrómetro de Emisión Termal de OSIRIS-REx, es un aparato que trabaja allí donde OVIRS no puede,
para completar la cartografía global mineralógica del objetivo (resolución, 40
metros) entre los 5 y los 50 micrones, mientras detecta la emisión termal de la superficie, y caracteriza, al
igual que los otros instrumentos, las zonas candidatas para la recolección de
muestras (resolución, 4 metros). Este sistema utiliza componentes ya bien
probados en misiones anteriores, siendo el sensor una réplica del Mini-TES que

portaron los rover marcianos Spirit y
Opportunity, mientras que la óptica
es idéntica a la fabricada para los TES de las Mars Observer y Mars Global
Surveyor. Se trata de un espectrómetro de transformación Fourier sumamente
compacto centrado en un interferómetro tipo Michelson y acabado en un conjunto
sensor no refrigerado. Sirviendo al sistema dispone de un telescopio tipo
Ritchey-Chretien f/3.91 con una
apertura de 15.2 cm., y respecto a los sistemas de los que deriva, la única
diferencia es el divisor de haz. Mientras el usado en los MER estaba fabricado
en bromuro de potasio, OTES dispone de uno elaborado en diamante depositado por
vapor químico. El sistema de telecomunicaciones de la sonda se podrá usar para
determinar la distribución de masas, la gravedad y los movimientos concretos
del asteroide. Y como último añadido, REXIS, Espectrómetro de Imágenes de Rayos
X para el Regolito, es un aparato en dos partes: el propio espectrómetro y el
Monitor
{kind=link}
{kind=link}

de rayos X Solares (SXM). El espectrómetro está formado por dos partes
principales, la máscara de apertura codificada (como las que se usan en varios
observatorios espaciales) elaborada a base de acero inoxidable de 100 micrones
de grosor, y un conjunto de cuatro sensores CCD (idénticos a los usados en el
sistema XIS del observatorio japonés Suzaku),
refrigerados a -60º C, y protegidos de otras radiaciones con un filtro de
bloqueo óptico, una capa de 220 nm de aluminio, con una separación, o longitud
focal, de 20 cm. Todo el aparato está protegido del bombardeo de partículas que
puedan penetrar por la apertura mediante una tapa de aluminio. Por su parte, el
SXM, situado junto a la antena de alta ganancia, observará continuamente al Sol
para informar al espectrómetro de cuántos rayos X agreden el asteroide,
empleando un sensor de deriva de silicio, protegido de la luz solar directa por
una pequeña ventana de berilio. Se encargará de realizar mapas químicos
globales (4.3 metros desde 700 metros) y locales del asteroide a base de
detectar la energía de los rayos X emitida o reflejada por los elementos que
forman la superficie, pudiendo detectar magnesio, hierro, azufre o silicio.
Este aparato tiene la particularidad de ser un proyecto realizado por
estudiantes universitarios, convirtiéndose en el segundo de su tipo en volar en
una sonda espacial, tras el VBSDC montado en New Horizons. La recolección de muestras será el propósito de
TAGSAM, Mecanismo de Adquisición de Muestras de Contacto y Separación. Se basa
en parte en el sistema elaborado para la cometaria Stardust, y dispone de cuatro elementos: un brazo
 articulado de 3.2
metros, la cabeza de muestras, un suministro de gas de nitrógeno, y la cápsula
de retorno de muestras. El brazo dispone de dos secciones de 1.6 metros,
recogidas en el lateral opuesto al de la antena principal, y en el final tiene
colocada la cabeza de muestras, un pequeño disco (que estará dentro de una
pequeña caja durante el viaje de crucero hacia el asteroide) que en su interior
posee tres contenedores que podrían almacenar desde 60 gramos hasta dos kilogramos de regolito, con un tamaño igual o inferior a dos centímetros. El
suministro de nitrógeno, situado alrededor del brazo articulado, será usado
para aspirar las partículas del regolito hacia los contenedores de la cabeza de
articulado de 3.2
metros, la cabeza de muestras, un suministro de gas de nitrógeno, y la cápsula
de retorno de muestras. El brazo dispone de dos secciones de 1.6 metros,
recogidas en el lateral opuesto al de la antena principal, y en el final tiene
colocada la cabeza de muestras, un pequeño disco (que estará dentro de una
pequeña caja durante el viaje de crucero hacia el asteroide) que en su interior
posee tres contenedores que podrían almacenar desde 60 gramos hasta dos kilogramos de regolito, con un tamaño igual o inferior a dos centímetros. El
suministro de nitrógeno, situado alrededor del brazo articulado, será usado
para aspirar las partículas del regolito hacia los contenedores de la cabeza de
 muestras. Y la cápsula de retorno de muestras es similar a la que se diseñó
para Stardust, en la que las muestras
del asteroide serán entregadas a los expertos en Tierra. La cápsula está
montada en la plataforma de equipamiento, sobre unos dispositivos pirotécnicos
preparados para soltarla en el momento preciso y provocar una rotación para
estabilizarla durante la reentrada, descendiendo después usando dos paracaídas. Como apoyo a las operaciones del sistema TAGSAM, se decidió casi a última hora un sistema de cámaras, denominado TAGCAMS. Está formado por tres cámaras y un sistema de control centralizado. todo el conjunto ha sido elaborado por la firma Malin Space Science Systems, especialista en este tipo de encargos, que ya ha elevado diversos sistemas de imágenes al espacio en sondas de la NASA, principalmente a Marte. Como hemos dicho, son tres cámaras, que utilizan la arquitectura modular desarrollada por la compañía, de ahí la
muestras. Y la cápsula de retorno de muestras es similar a la que se diseñó
para Stardust, en la que las muestras
del asteroide serán entregadas a los expertos en Tierra. La cápsula está
montada en la plataforma de equipamiento, sobre unos dispositivos pirotécnicos
preparados para soltarla en el momento preciso y provocar una rotación para
estabilizarla durante la reentrada, descendiendo después usando dos paracaídas. Como apoyo a las operaciones del sistema TAGSAM, se decidió casi a última hora un sistema de cámaras, denominado TAGCAMS. Está formado por tres cámaras y un sistema de control centralizado. todo el conjunto ha sido elaborado por la firma Malin Space Science Systems, especialista en este tipo de encargos, que ya ha elevado diversos sistemas de imágenes al espacio en sondas de la NASA, principalmente a Marte. Como hemos dicho, son tres cámaras, que utilizan la arquitectura modular desarrollada por la compañía, de ahí la
 rapidez en su elaboración. Dos de ellas se denominan NavCams. Situadas en un lateral de la plataforma de instrumentos, se trata de sistemas gemelos que están basados en la arquitectura de cámaras ECAM-M50, que son cámaras monocromáticas equipadas con sensores CMOS de 2592 x 1944 pixels, y portando ópticas ECAM-MFOV, es decir, de campo de visión medio, un sistema refractor con una longitud focal de 7.1 mm. (f/3.5). Su misión será la de ayudar a la navegación durante el descenso hasta la superficie para la operación de recogida de muestras. la tercera cámara se denomina StowCam, y se sitúa sobre un pequeño pedestal permitiendo a la cámara, situada de lado, apuntar a la cápsula de retorno de muestras. su misión será la de verificar la correcta colocación de la cabeza de muestras dentro de la cápsula y (suponemos) del lanzamiento de la misma en el momento de la entrega. en general es idéntica a las NavCams, salvo que usará la arquitectura ECAM-C50, de dimensiones idénticas de sensor CMOS, pero equipada con un filtro Bayer para tomar imágenes a color. Las tres cámaras están controladas por un sistema de control propio llamado DVR8, o Video Grabador Digital de Ocho puertos. Éste es una suerte de ordenador con dos tarjetas capaz de soportar hasta ocho cámaras, aunque en esta ocasión una soportará una de las NavCams y la StowCam, mientras que la otra controlará la cámara restante. el sistema es capaz de secuenciar comandos, procesar las imágenes, comprimirlas y almacenarlas, y no solo eso, sino que es también capaz de juntar las imágenes para crear vídeos de las secuencias grabadas, tanto del descenso a la superficie como del almacenamiento de las muestras en la cápsula. En el momento del lanzamiento dará un peso en báscula de 2110 kg.
rapidez en su elaboración. Dos de ellas se denominan NavCams. Situadas en un lateral de la plataforma de instrumentos, se trata de sistemas gemelos que están basados en la arquitectura de cámaras ECAM-M50, que son cámaras monocromáticas equipadas con sensores CMOS de 2592 x 1944 pixels, y portando ópticas ECAM-MFOV, es decir, de campo de visión medio, un sistema refractor con una longitud focal de 7.1 mm. (f/3.5). Su misión será la de ayudar a la navegación durante el descenso hasta la superficie para la operación de recogida de muestras. la tercera cámara se denomina StowCam, y se sitúa sobre un pequeño pedestal permitiendo a la cámara, situada de lado, apuntar a la cápsula de retorno de muestras. su misión será la de verificar la correcta colocación de la cabeza de muestras dentro de la cápsula y (suponemos) del lanzamiento de la misma en el momento de la entrega. en general es idéntica a las NavCams, salvo que usará la arquitectura ECAM-C50, de dimensiones idénticas de sensor CMOS, pero equipada con un filtro Bayer para tomar imágenes a color. Las tres cámaras están controladas por un sistema de control propio llamado DVR8, o Video Grabador Digital de Ocho puertos. Éste es una suerte de ordenador con dos tarjetas capaz de soportar hasta ocho cámaras, aunque en esta ocasión una soportará una de las NavCams y la StowCam, mientras que la otra controlará la cámara restante. el sistema es capaz de secuenciar comandos, procesar las imágenes, comprimirlas y almacenarlas, y no solo eso, sino que es también capaz de juntar las imágenes para crear vídeos de las secuencias grabadas, tanto del descenso a la superficie como del almacenamiento de las muestras en la cápsula. En el momento del lanzamiento dará un peso en báscula de 2110 kg.






Ciertamente, es una misión apasionante y muy importante en términos de
historia del sistema solar y en cuanto a la seguridad futura en caso de que un
asteroide pueda colisionar con la Tierra. Usando filosofía y tecnología
heredada de misiones como MRO, NEAR-Shoemaker
y Stardust, es un proyecto muy
completo que arrojará mucha luz sobre unos cuerpos hasta hace poco bastante
desconocidos. Si hay suerte, pronto (relativamente) podremos disponer de nuevas
muestras de un objeto cósmico distinto a la Luna, a un cometa o el Sol. Desde
aquí le mandamos toda la suerte que tengamos por aquí.
Suscribirse a:
Entradas (Atom)